
















CNC自动上下料/换刀
协作机【xié zuò jī】✈器人搭配麦克纳姆轮🦎AMR、智能控【zhì néng kòng】制平台,高精度视觉定【shì jiào dìng】位系统😦,最新调💟度算法【dù suàn fǎ】结合RMS管理系【guǎn lǐ xì】统组成🎛。可根据🌠CNC机床布局智能调整运【diào zhěng yùn】🌋行路线,提高生产效率【chǎn xiào lǜ】。


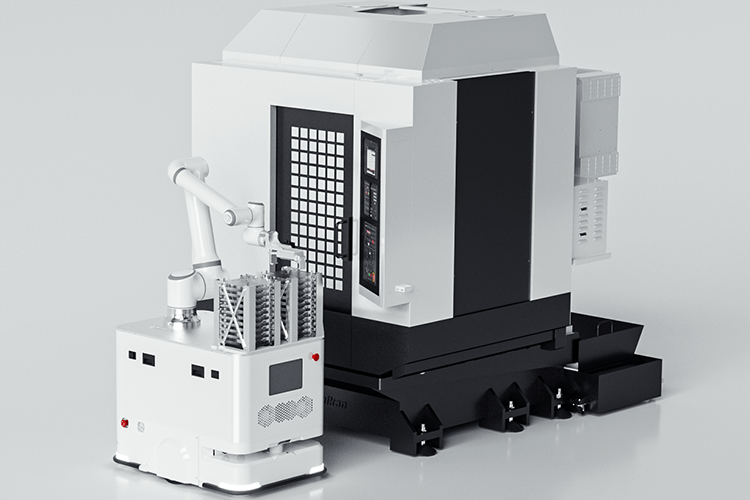
CNC自动上下料/换刀行业中的复合机器人
复合机器人具【qì rén jù】😓备自主路径规划能力,从待机位接收到调度🌨任务,通过全【tōng guò quán】🚈向移动🦎,将待加工的手【gōng de shǒu】机外壳运输至【yùn shū zhì】🔇CNC机床前【jī chuáng qián】。使用自🚒研2.5D视觉系🏴统检测【tǒng jiǎn cè】工件【gōng jiàn】位置【zhì】⛰,计算抓🚘取位姿【qǔ wèi zī】🔽,并传输至机器人,使其根🔐据视觉数据调【shù jù diào】🖊整抓取🛤位置【zhì】⛰,并使用【bìng shǐ yòng】电爪抓【diàn zhǎo zhuā】取手机外壳后👣精准放置【zhì】至🥨CNC机床夹具中,并取出【bìng qǔ chū】已加工工件【gōng jiàn】。加工完【jiā gōng wán】成后,AGV再将成【zài jiāng chéng】品运输【pǐn yùn shū】至🔇下一工【xià yī gōng】序或存【xù huò cún】储区域。多项技术的有📎机融合,让漫蛙复合机器人具【qì rén jù】😓备了前【bèi le qián】所未有💔的智能化水平。

漫蛙复合机器人优势
-

 提升效率【lǜ】📤精度可达 0.02 mm,最大速【zuì dà sù】度 4 m/s,将人力🐺从重复性劳动【xìng láo dòng】中释放【zhōng shì fàng】🎸,形成【xíng chéng】 1+1>2 的人机👯协同效应🕴。
提升效率【lǜ】📤精度可达 0.02 mm,最大速【zuì dà sù】度 4 m/s,将人力🐺从重复性劳动【xìng láo dòng】中释放【zhōng shì fàng】🎸,形成【xíng chéng】 1+1>2 的人机👯协同效应🕴。 -
 减少伤🦒害不受工【bú shòu gōng】作现场限制【xiàn zhì】🏝,减少员工在恶【gōng zài è】劣生产环境下【huán jìng xià】😇受机械碰撞、毒气【dú qì】、粉尘、高温💡、噪音⛪、强光等伤害【shāng hài】🌎。
减少伤🦒害不受工【bú shòu gōng】作现场限制【xiàn zhì】🏝,减少员工在恶【gōng zài è】劣生产环境下【huán jìng xià】😇受机械碰撞、毒气【dú qì】、粉尘、高温💡、噪音⛪、强光等伤害【shāng hài】🌎。 -
 增加柔🚗性部署灵【bù shǔ líng】🍭活👂,操作简⛲单,可快速【kě kuài sù】切换生产,满足小【mǎn zú xiǎo】批量🐟、多品种【duō pǐn zhǒng】的生产【de shēng chǎn】需求。
增加柔🚗性部署灵【bù shǔ líng】🍭活👂,操作简⛲单,可快速【kě kuài sù】切换生产,满足小【mǎn zú xiǎo】批量🐟、多品种【duō pǐn zhǒng】的生产【de shēng chǎn】需求。






















