CS620F
-
亮点【liàng diǎn】🏏
-
参数【cān shù】🐘
-
图纸【tú zhǐ】🤼
-
控制箱/示教器【shì jiāo qì】🥜/示教软【shì jiāo ruǎn】🥟件
-
相关资【xiàng guān zī】🌗源
-
相关产品【pǐn】💍
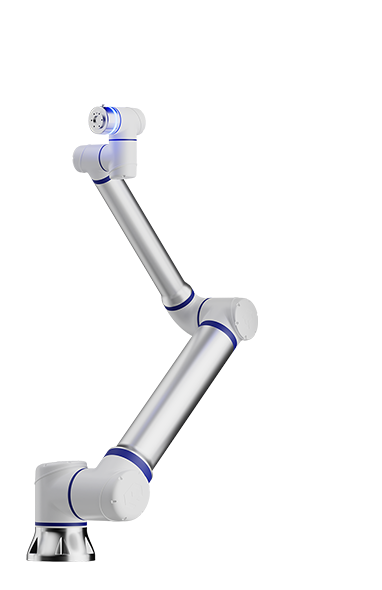
CS620F
-
 1800mm
1800mm工作半🍛径【jìng】
-
 20kg
20kg负载【fù zǎi】⏳
-
 ±0.05mm
±0.05mm重复定🚬位精度【wèi jīng dù】
-
 60Kg
60Kg自重【zì chóng】📂
产品参数
-
技术参🧤数【shù】
-
关节参数【shù】🧣
-
力控参【lì kòng cān】🎣数
-
物理参【wù lǐ cān】🥀数
-
配件型🧦号【hào】
-
名称【míng chēng】🚊 参数 自由度🔃 6 负载 20kg 工作半🚏径 1800mm 重复定位精度🔃 ±0.05mm 典型功【diǎn xíng gōng】耗 625W 安装方式【shì】 任意角🏙度🔃 工具🏠I/O 4xDO/4xDI 、1xAI 、1xAO 工具🏠I/O供电💀 接口【jiē kǒu】🚘1:12V/24V,3A(三针模【sān zhēn mó】式【shì】),2A(双针模【shuāng zhēn mó】🥌式【shì】),1A(单针模式【shì】);接口【jiē kǒu】🚘2:24V,5A 工具🏠通信【tōng xìn】 RS485、CAN(预留🔔)
-
关节运【guān jiē yùn】♍动范围🌔 关节最🥧大速度【dà sù dù】🐨 基座 ±360° 125°/s 肩部 ±360° 125°/s 肘部 ±360° 150°/s 腕部【wàn bù】1 ±360° 210°/s 腕部【wàn bù】2 ±360° 210°/s 腕部【wàn bù】3 ±360° 210°/s 工具最大速度【dà sù dù】🐨 3.9m/s 3.9m/s
-
力【lì】💛/力【lì】💛矩传感器 量程🍞 Fxyz=500N,Mxyz=50Nm 准度【zhǔn dù】 5N, 0.5Nm 精度😊 2N, 0.2Nm 过载能【guò zǎi néng】力【lì】💛 400%
-
名称 参数🥝 自重 60kg 底座直【dǐ zuò zhí】径 Φ240mm IP防护等【fáng hù děng】⬅级 IP68 工作环【gōng zuò huán】🙇境温度 -10°C~50 ℃ 工作环【gōng zuò huán】🙇境湿度😸 90%相对湿【xiàng duì shī】度(非冷凝) 材料🥡 铝合金、钢😗、塑料、橡胶【xiàng jiāo】👀 标准线【biāo zhǔn xiàn】缆长度 5.5m
-
名称㊙ 参数 控制箱 ERB2C2K0 / ERB2C2K0N / ERB1C4K0MNE 示教器【shì jiāo qì】🤯 ERP400 全能示【quán néng shì】教器【jiāo qì】🤯(选配) ERP400S

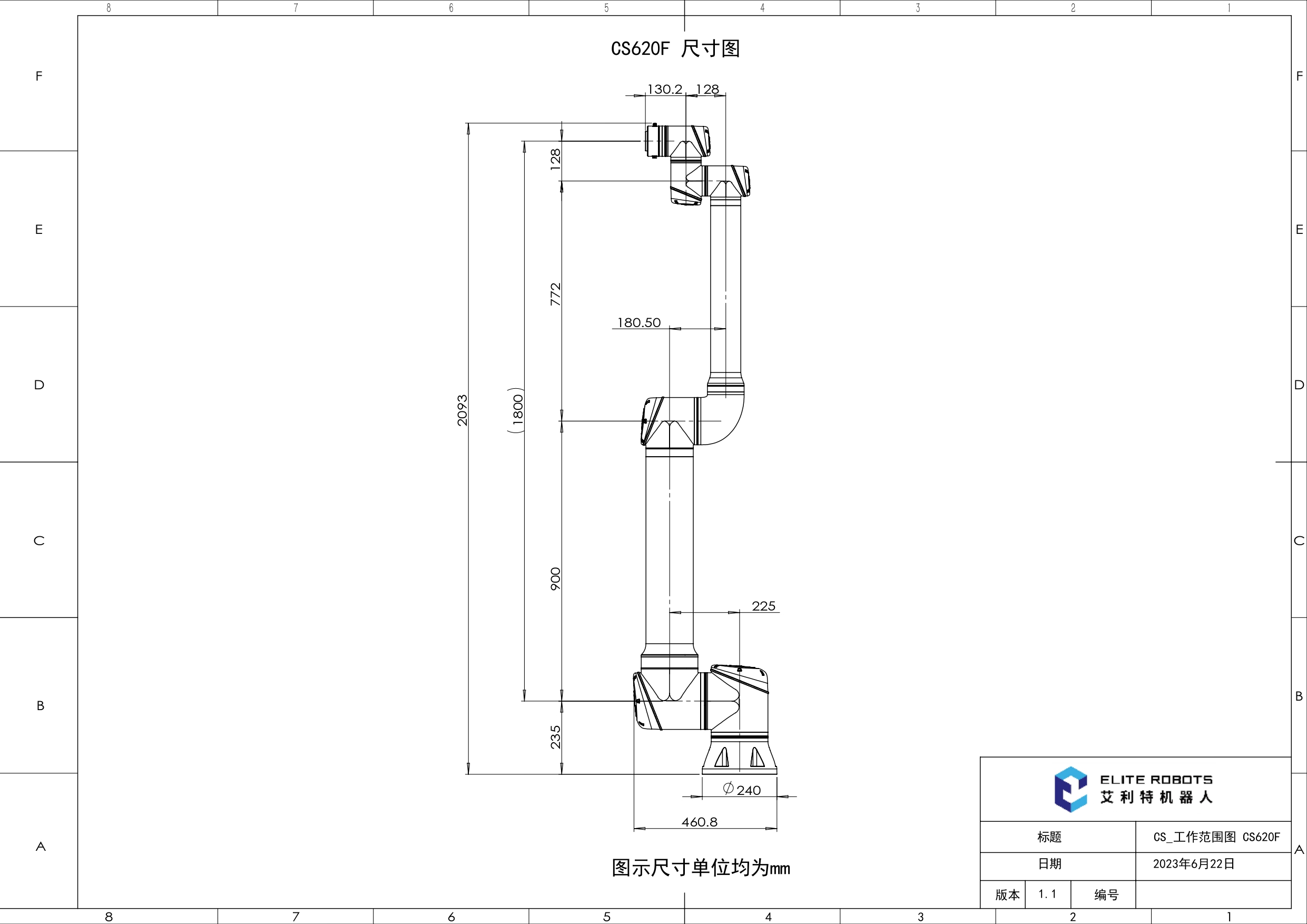
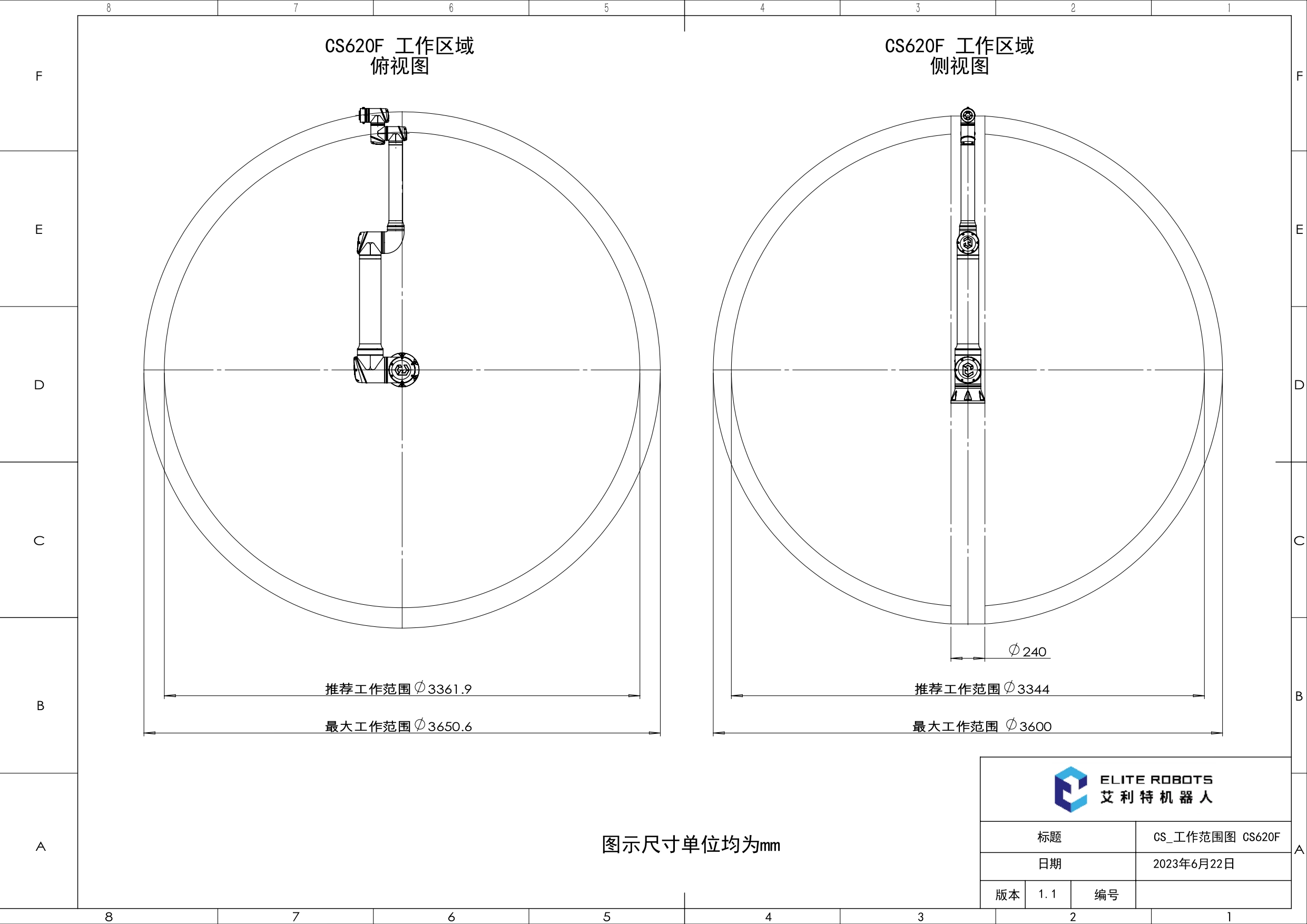
产品图纸
-
外形尺【wài xíng chǐ】寸图🍕
-
工作范【gōng zuò fàn】🆗围图














您还可以看看