
















EC机器人缩减模式干涉区及软极限
1. 本篇文🎖档介绍【dàng jiè shào】⛱了EC机器人🍽缩减模式配置使用【shǐ yòng】,干涉区配置及【pèi zhì jí】软极限【ruǎn jí xiàn】的应用✉
2. 操作流程
2.1缩减模式配置
出于安全原因,机器人的某些【de mǒu xiē】功能可【gōng néng kě】能会受到限制【zhì】🎼。要配置这些设置航到【zhì háng dào】🤩 运行准备🦎 >安全配🌷置 > 安全限【ān quán xiàn】🐪制【zhì】。
安全限制可配置功率【zhì gōng lǜ】,动量【dòng liàng】❕,工具力🧢,肘部力【zhǒu bù lì】以及速【yǐ jí sù】度百分比的缩🐯减。当机器人【jī qì rén】🚔触发缩【chù fā suō】减模🍝式时,机器人【jī qì rén】🚔会以缩减后的速度、功率工作💲。
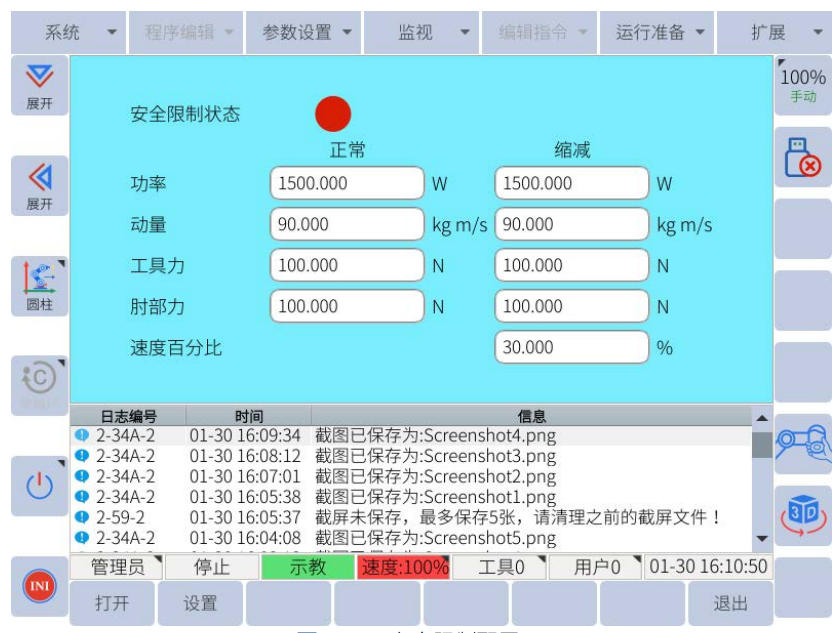
功率:限制机器人对环境做的最大机械功。
动量:限制最大机器人动量。
工具力💽:限制机【xiàn zhì jī】🐟器人工具在夹🐼紧情况【jǐn qíng kuàng】中施加的最大【de zuì dà】力。
肘部力: 限制机🔓器人肘【qì rén zhǒu】部对环【bù duì huán】👋境施加【jìng shī jiā】💮的最大力。
速度百分比:限制正常模式下的速度
要启用这些安【zhè xiē ān】🎆全限制,请单击【qǐng dān jī】子菜单区域中【qū yù zhōng】的👩“打开🧚/关闭”。
2.2缩减模式触发
用户可🕊在 监视【jiān shì】🤛 > 输入输【shū rù shū】出 > 虚拟输【xū nǐ shū】出 界面查看【kàn】🙅 M526 和🤑 M527 是否为缩减模式。
用户通【yòng hù tōng】🗯过在 扩展>用户PLC 界面配【jiè miàn pèi】置辅助寄存器S17、S18触发条【chù fā tiáo】🚩件💎。
常用数【cháng yòng shù】字信号【zì xìn hào】和机器人M变量进【biàn liàng jìn】行缩减🐰模式触🔋发🎱
两路赋【liǎng lù fù】🛡值寄存器S17、S18,触发一【chù fā yī】个信号即可进入缩减🌕模式【mó shì】;也可作🎎为双回路使用【lù shǐ yòng】😬。
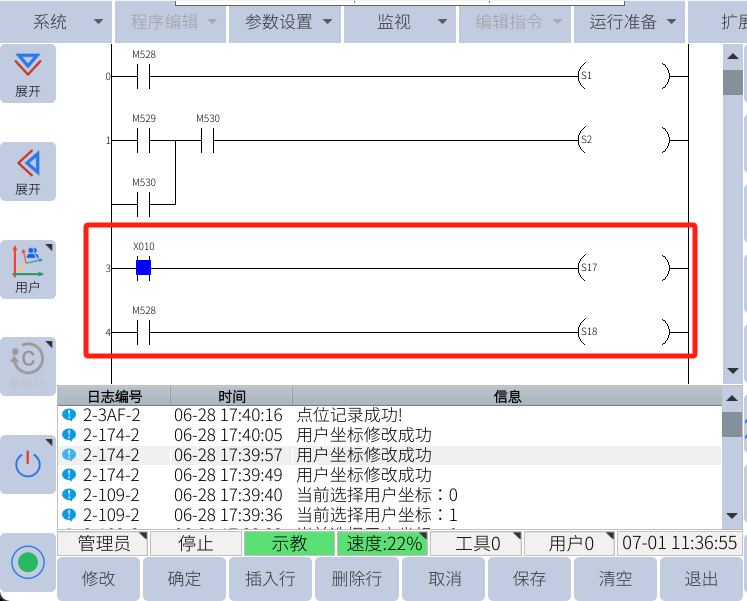
注【zhù】:用户PLC修改完成后要🛁先保存📲,机器人【jī qì rén】重启生✍效【xiào】。
2.3干涉区的设置及应用
干涉区【gàn shè qū】📓是与基座坐标❗系轴平【xì zhóu píng】行的立方体。系统信号对机【hào duì jī】器人进【qì rén jìn】行判断是在干【shì zài gàn】涉区📓内还是干涉区【gàn shè qū】📓外,并把判【bìng bǎ pàn】🗞断情况以信号⏩方式输出【chū】👬M440-M455。干涉区【gàn shè qū】📓的设定🏸方法有【fāng fǎ yǒu】🎬以下三种:
顶点模式
1. 选择🍂“运行准【yùn háng zhǔn】🌠备 > 干涉区【gàn shè qū】”。
2. 设置🕑“使用方【shǐ yòng fāng】🤩式”为【wéi】📣“立方体”,“点位”为【wéi】📣“顶点模【dǐng diǎn mó】式”。
3. 选择【xuǎn zé】“顶点【dǐng diǎn】🈚 1”,用轴操🏐作键移动机器人到立方体的顶点【dǐng diǎn】🈚 1,点击“记录点 1”。
4. 选择“顶点【dǐng diǎn】🎃 2”,用轴操🌯作键移动机器【dòng jī qì】人到立方体的【fāng tǐ de】🖊顶点【dǐng diǎn】🎃 2,点击“记录点 2”。
5. 点击子菜单栏【cài dān lán】⛵的“设置【shè zhì】🌎”,干涉区【gàn shè qū】即设置【shè zhì】🏟成功。

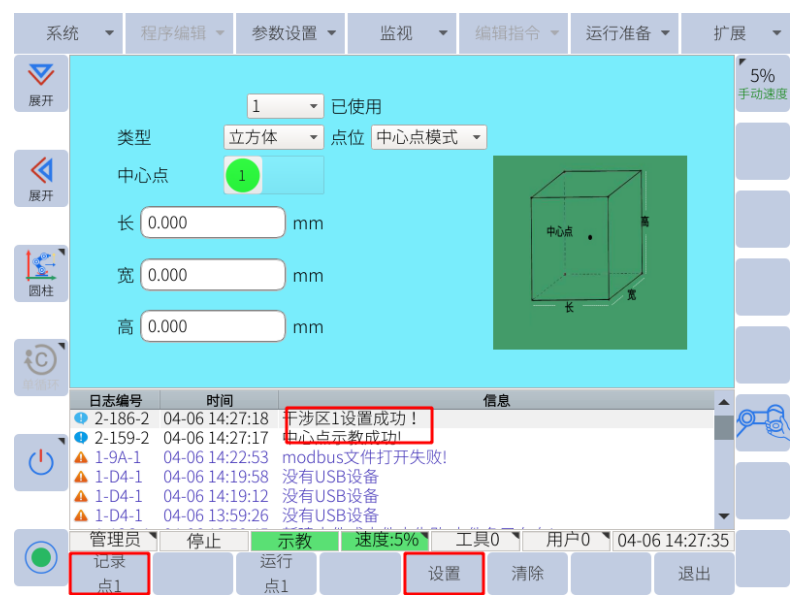
中心点模式:
1. 选择✝“运行准【yùn háng zhǔn】🆓备【bèi】 > 干涉区”。
2. 设置“使用方😹式【shì】”为“立方体【lì fāng tǐ】”,“点位💞”为“中心点【zhōng xīn diǎn】🍢”。
3. 选择“中心点🕶”,用轴操【yòng zhóu cāo】作键移【zuò jiàn yí】🙎动机器👡人到立方体的【fāng tǐ de】😗中心点🕶位置【wèi zhì】,点击“记录点 1”。
4. 输入立方体的长🏼、宽【kuān】、高数值❄,单位【dān wèi】mm。
5. 点击子【diǎn jī zǐ】菜单栏【cài dān lán】🆓的“设置🐄”,干涉区即设置【jí shè zhì】💒成功。
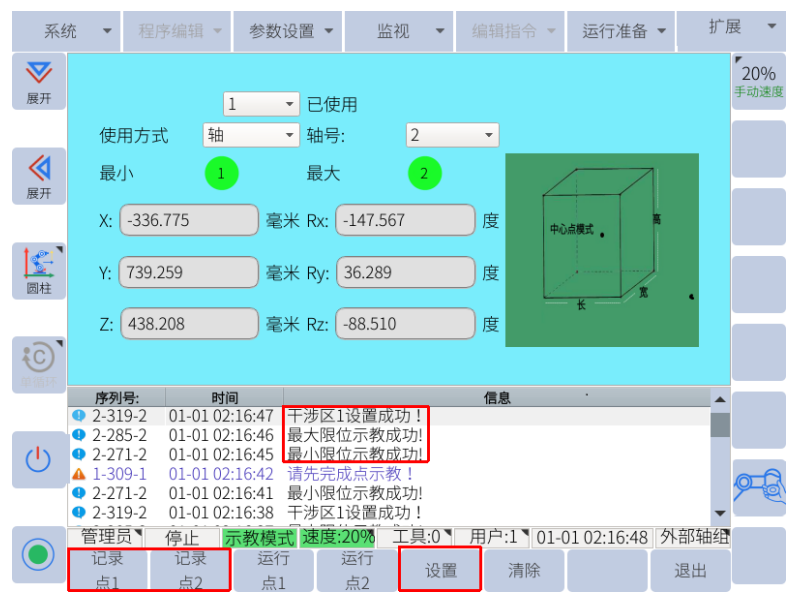
轴干涉区:指判断各轴当前位置并输出信号
1. 选择【xuǎn zé】🗒“运行准【yùn háng zhǔn】🛺备 > 干涉区”。
2. 设置【shè zhì】“使用方式”为“关节🍴”,选择对【xuǎn zé duì】😤应的轴【yīng de zhóu】🕛号。
3. 选择【xuǎn zé】“最小点【zuì xiǎo diǎn】”,按相应的轴操作键记【zuò jiàn jì】录该轴🧒区间的㊗最小点【zuì xiǎo diǎn】位📰,点击“记录点【jì lù diǎn】🏓 1”。
4. 选择😘“最大点【zuì dà diǎn】”,按相应的轴操【de zhóu cāo】作键记录该轴🍋区间的【qū jiān de】🎣最大点【zuì dà diǎn】位,点击🦓“记录点【jì lù diǎn】 2”。
5. 点击子【diǎn jī zǐ】菜单栏【cài dān lán】🌆的【de】“设置😣”,干涉区即设置🚀成功。
干涉区🕒触发信【chù fā xìn】号为虚【hào wéi xū】拟输出⏯M440-M455(干涉区🕒1到16)
2.4软极限设置
软极限【ruǎn jí xiàn】㊗可以限【kě yǐ xiàn】🎊制每个关节的【guān jiē de】🏂旋转极🚐限。导航 参数设置【zhì】 -> 软极限【ruǎn jí xiàn】㊗设置【zhì】 除了【chú le】🗼3轴极限为正负🥥160°其他轴极限均为正负🥥360°。

3. 常见问题
如果开🐲机发现某个轴🔀在软极限之外【xiàn zhī wài】🐲,并触发软极限报警;可通过【kě tōng guò】🔐示教器操作该【cāo zuò gāi】轴往回【zhóu wǎng huí】转动。


























