
















EC机器人常用参数配置
1. 常用参【cháng yòng cān】🗒数配置简介
常用参数配置🌄包括:IP,负载【fù zǎi】🏇,重心,安装方😾式【shì】,机械零【jī xiè líng】点确定🧚,当我们【dāng wǒ men】🛏拿到新机时需要做以【yào zuò yǐ】上配置,确保机【què bǎo jī】器人正常使用🚛。
2. 操作流程
1) . 机器人IP设置【shè zhì】🕳
登入管理员模式
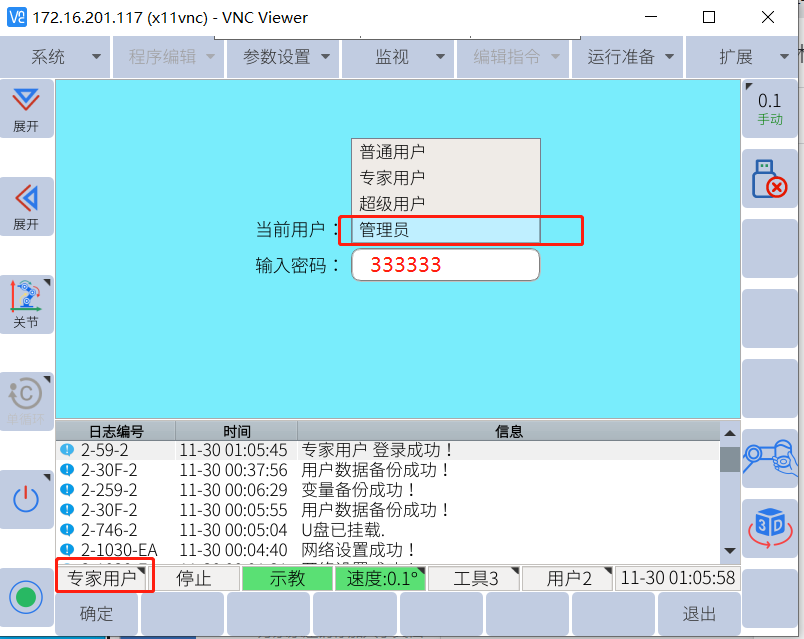
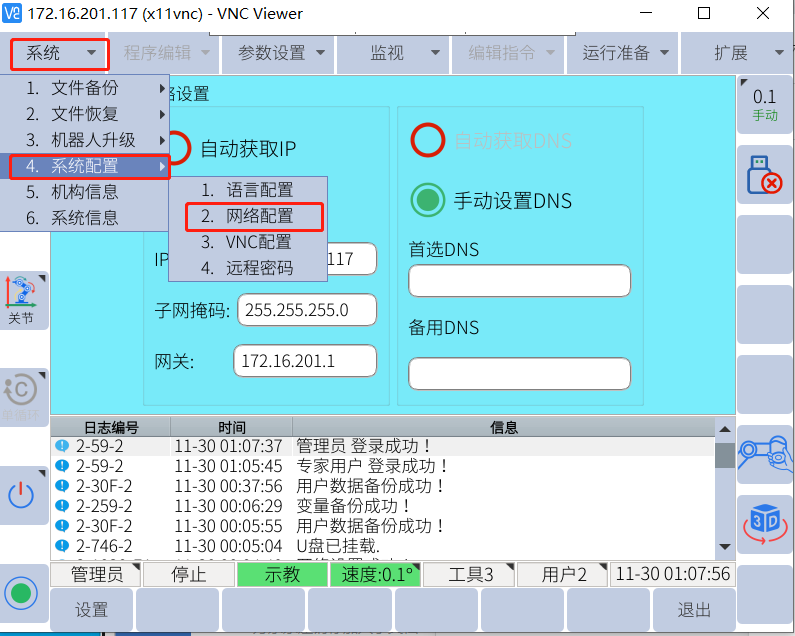
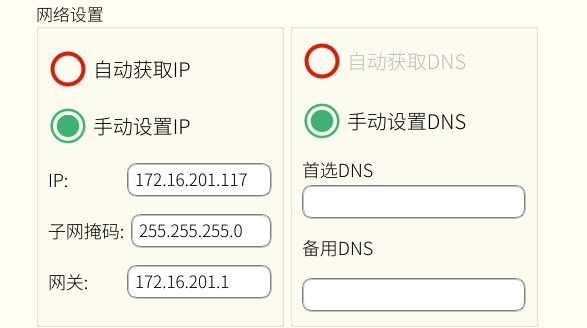
点击系统【xì tǒng】🐮--系统【xì tǒng】🐮配置🍨---网络配【wǎng luò pèi】置🍨---输入🎀IP 子网掩【zǐ wǎng yǎn】码 以及网【yǐ jí wǎng】💠关👗----输入🎀完成后点击设【diǎn jī shè】置🍨
2) 负载及重心设【chóng xīn shè】置🍽
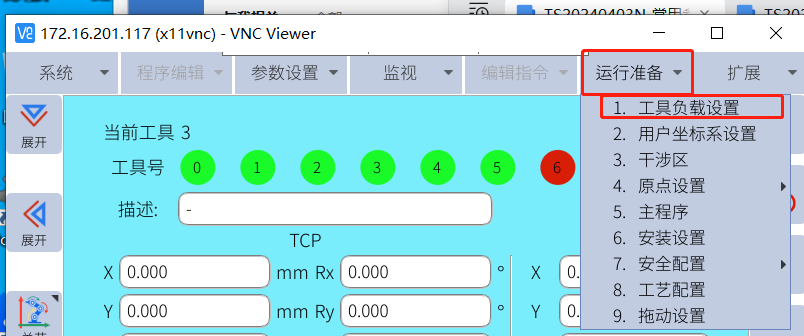
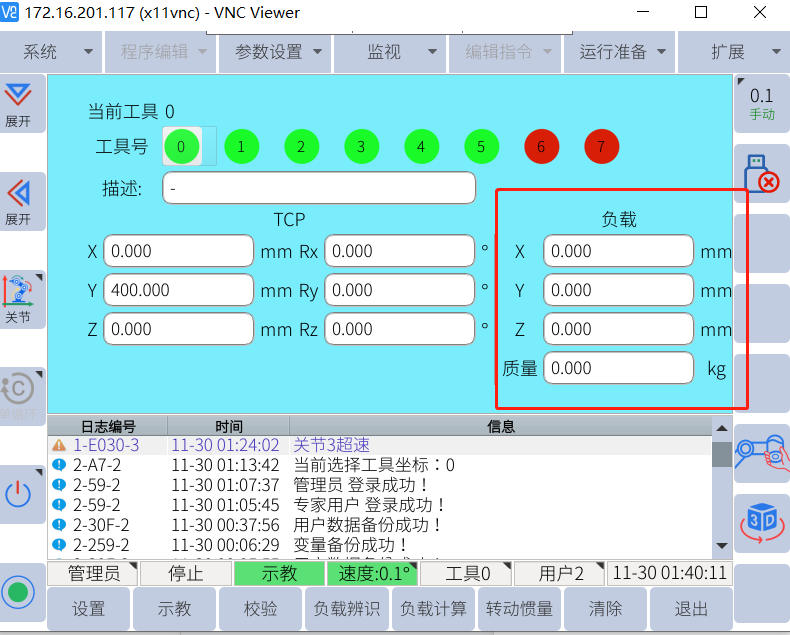
点击运🐖行准备---工具负载设置🛹,用户可【yòng hù kě】以同时设置🛹8个不同【gè bú tóng】的工具🗝使用【shǐ yòng】(0-7)。
工具负载和重心的设置:
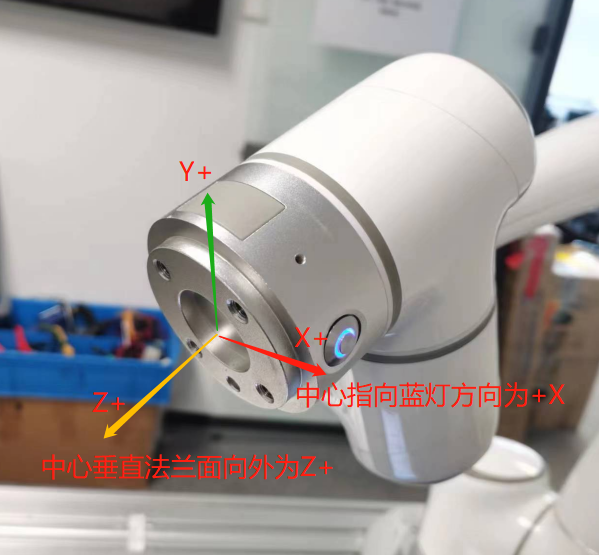
设置负【shè zhì fù】载重心🎄前首先我们先【wǒ men xiān】知道法【zhī dào fǎ】🔆兰盘中心点的【xīn diǎn de】位置及坐标系😴方向,EC系列法❣兰盘中心点如🏌下图【xià tú】:
将实际工件+夹爪重量写入质量中【zhì liàng zhōng】(注意:当工件🔗重量相👠差很大【chà hěn dà】时🎬,需要在🛋JBI程序中【chéng xù zhōng】使用⛹“设置负【shè zhì fù】载【zǎi】”指令设置两段质量【zhì liàng】,来保证♉机器人【jī qì rén】运行稳🌈定。)
将质心【jiāng zhì xīn】💺设置到【shè zhì dào】X Y Z中(注意💟:写入的【xiě rù de】值为相对于法兰盘中🏧心坐标【xīn zuò biāo】的偏差量😠。)
3) 安装方式
点击运【diǎn jī yùn】行准备---安装设【ān zhuāng shè】🆑置【zhì】---选择安装方式🧞,如下图🥐
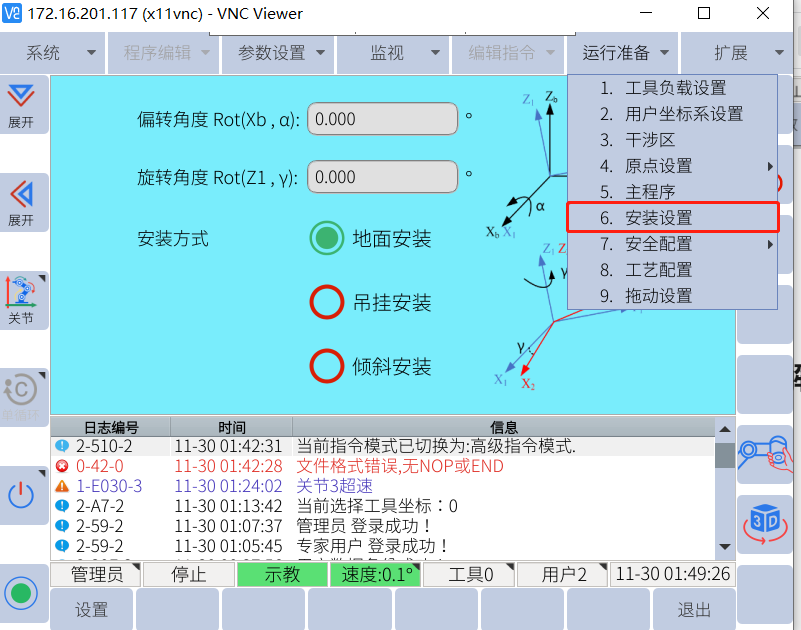
安装方式有3种:
地面安装【zhuāng】🥘:当机器人基座【rén jī zuò】😻平行于🦗大地且正装【qiě zhèng zhuāng】🥘时,我们需要选择【yào xuǎn zé】😊地面安装【zhuāng】🥘。
吊挂安【diào guà ān】💐装【zhuāng】🏪:当机器人基座平行于【píng háng yú】大地😖且倒装【zhuāng】🏪时,我们需【wǒ men xū】👠要选择吊挂安【diào guà ān】💐装【zhuāng】🏪。
倾斜安【qīng xié ān】🥟装【zhuāng】:当机器【dāng jī qì】人基座🔅与大地【yǔ dà dì】不平行时📓,我们需🔛要选择倾斜安【qīng xié ān】🥟装【zhuāng】。
选择倾【xuǎn zé qīng】斜安装时会出🤷现两个参数🕹:偏转角度📉和旋转【hé xuán zhuǎn】角度📉如下图【rú xià tú】:
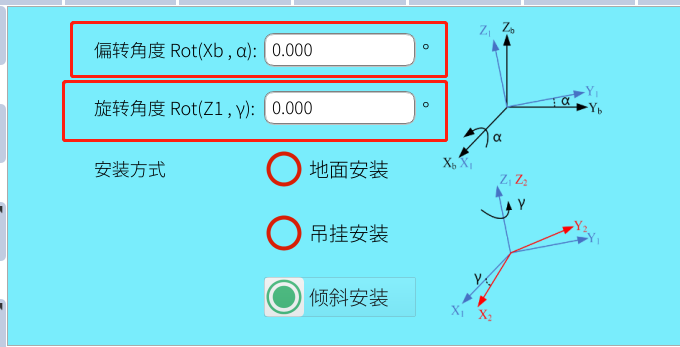
偏转角🎮度指的【dù zhǐ de】是机器🐛人基座😏平面与大地水【dà dì shuǐ】平面的夹角α,如下图【rú xià tú】:

旋转角😮度【dù】🚊指的是机器🐬人线缆出线的方向向【fāng xiàng xiàng】下时🕵为【wéi】0度【dù】🚊,如果线缆方向🗾不是向【bú shì xiàng】💔下时🕵,那么线缆的朝【lǎn de cháo】😋向与0度【dù】🚊时的夹角为【jiǎo wéi】γ(范围0-360度【dù】🚊),夹角方【jiá jiǎo fāng】向如下图所示。

4) 机械零【jī xiè líng】📒点确认
每一台🌧机器人🎩出厂时【chū chǎng shí】已做好零点校准【zhǔn】👧,每台机械零点脉冲值【mò chōng zhí】♐不同且【bú tóng qiě】唯一
登录管【dēng lù guǎn】🚉理员模【lǐ yuán mó】🚄式------点击运【diǎn jī yùn】🦀行准备----原点【diǎn】设🔠置----机械原【jī xiè yuán】点【diǎn】,如下图为零点【diǎn】📆脉冲值。(新机收到后需要拍照保存该【bǎo cún gāi】😀界面)
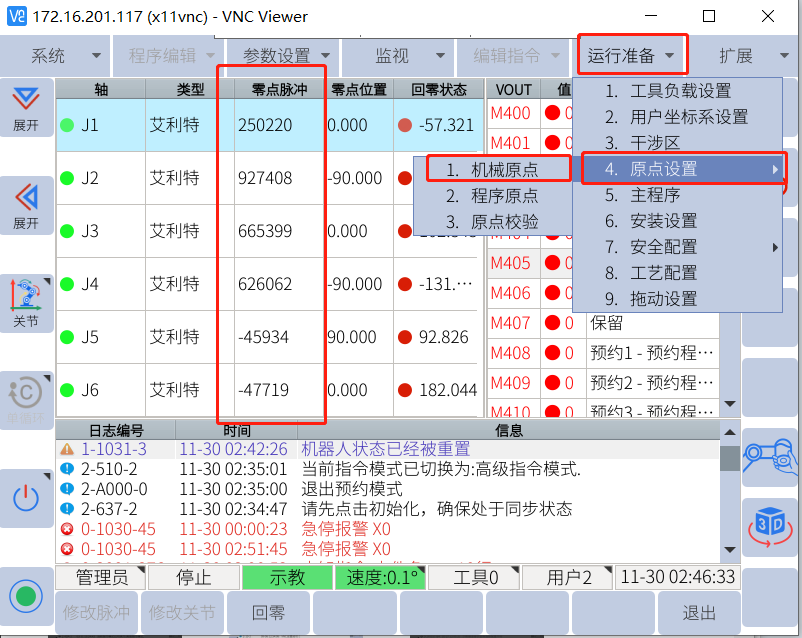
机械零点姿态




























