
















CS机器人撞机卡死处理
1. 简介
机器人【jī qì rén】🐬撞机后由于和外部接【wài bù jiē】📸触一直反馈一定的扭【dìng de niǔ】🏈力🌛,机器人【jī qì rén】🐬会一直🚸报警不【bào jǐng bú】能进行🥕移动和拖动情况下,需要进入反向驱动模式或关【shì huò guān】闭碰撞检测【jiǎn cè】。建议优【jiàn yì yōu】先考虑🐊使用【shǐ yòng】🐹“反向驱动”
反向驱【xiàng qū】💣动【dòng】:反向驱【xiàng qū】💣动【dòng】功能可以用【kě yǐ yòng】🏕于机器人【jī qì rén】解除卡死状态,进入反【jìn rù fǎn】向驱【xiàng qū】💣动【dòng】模式时📡,机器人【jī qì rén】可以直接使用手进行拖动【dòng】移😾出碰撞😖区域📶。
碰撞检【pèng zhuàng jiǎn】测:当机器人【jī qì rén】🏜本体上电外🌶力超过用户安全设置【quán shè zhì】的正常受力范【shòu lì fàn】围时,机器人【jī qì rén】🏜本体自😄动停止,以防机🔱器人或【qì rén huò】💕操作人【cāo zuò rén】员碰撞受伤🐖。
2. 操作流程
2.1. 电磁抱【diàn cí bào】闸-机器人【jī qì rén】进入“反向驱💨动😡”
● 机器人进入下🌅图界面【tú jiè miàn】,点击 “打开电😾源【yuán】“

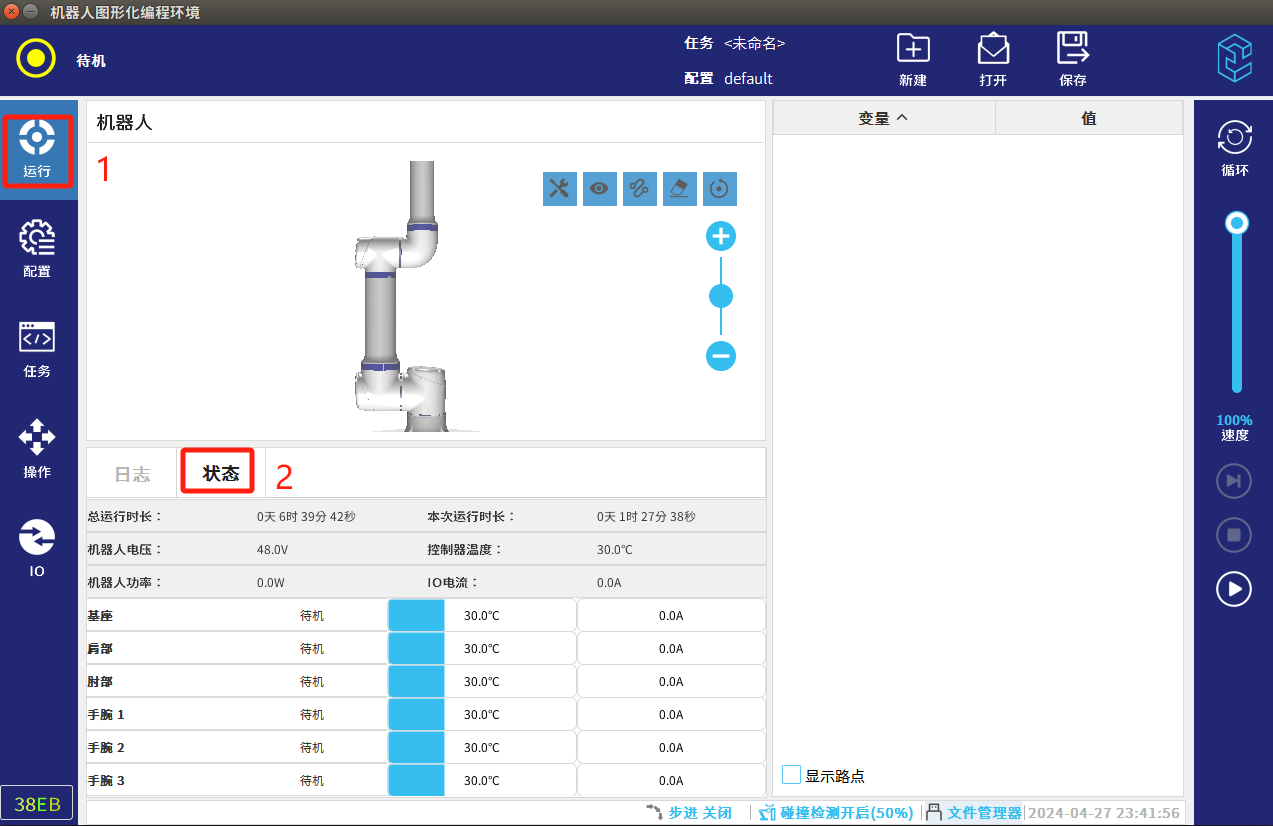
● 机器人【jī qì rén】🤵显示”待机👱“状态后🍄退出【tuì chū】,进入运行页面【háng yè miàn】,切换状态
● 按住示教器反面的拖【miàn de tuō】🗽动使能【dòng shǐ néng】开关【kāi guān】,机器人【jī qì rén】即进入【jí jìn rù】💼 “反向驱🐵动”模式【mó shì】🛺。点击开🌿启对应轴的”反向驱🐵动“,此时关节在重力的作用下会【yòng xià huì】正常下滑,机器人【jī qì rén】可以直接使用【jiē shǐ yòng】🏬手进行🧙拖动✨。

● 此时跟进现场【jìn xiàn chǎng】🤕情况单🎏独开启一个轴【yī gè zhóu】或多个轴反向驱动,用手进😳行拖动将机器手【jī qì shǒu】🔖移动到安全区域。松开示教器反【jiāo qì fǎn】🈲面【miàn】🌱的拖动【de tuō dòng】使能♒开关,机器手【jī qì shǒu】🔖电机抱闸后【zhá hòu】,再松开机器人【rén】🌙本体防止机器【zhǐ jī qì】👉臂下滑【bì xià huá】导致二🗑次伤害📭。当机器【dāng jī qì】人【rén】🌙在安全区域内【qū yù nèi】进入🎽下图界【xià tú jiè】面【miàn】🌱,点击🆕 “释放抱闸“。等待页面【miàn】🌱左上角显示【xiǎn shì】“正常模式”,机器人【rén】🌙可正常【kě zhèng cháng】使用。

2.2. 插销抱🎉闸-机器人【jī qì rén】进入“反向驱动【dòng】📤”
● 机器人进入下🦑图界面【tú jiè miàn】,点击 “打开电【dǎ kāi diàn】🆓源“
● 机器人显示”待机“状态后📁,按住示【àn zhù shì】教器反【jiāo qì fǎn】📓面的拖💢动使能【dòng shǐ néng】🧗开关【kāi guān】,机器人即进入 “反向驱动🌧”模式。机器人可以直【kě yǐ zhí】接使用【jiē shǐ yòng】⏬手进行拖动🌧,当受力达到一定程度【dìng chéng dù】🛐后📁,伺服会【sì fú huì】自动🌧松开抱闸,并被推【bìng bèi tuī】👣动🌧。
● 将机器【jiāng jī qì】人💍移动到安全⛓区域内【qū yù nèi】,然后点【rán hòu diǎn】击 “释放抱🏍闸💢“。等待页面左上【miàn zuǒ shàng】👋角显示【jiǎo xiǎn shì】“正常模式【shì】”,机器人💍可正常使用。
2.3. 关闭碰撞检测功能
底部状态栏中设有菜单快捷键,点击

将出现一个弹框

● 机器人🏇撞机后由于和🤘外部接📻触一直【chù yī zhí】反馈一【fǎn kuì yī】😉定的扭【dìng de niǔ】📰力【lì】,机器人🏇会一直【huì yī zhí】☕报警碰撞检测🛐。关闭碰【guān bì pèng】撞检测🛐后,可将机【kě jiāng jī】💗器人点【qì rén diǎn】动移开。移动前必须确认移动方向是远离撞👐机点,防止造成二次伤害损坏关节【huài guān jiē】的电机【de diàn jī】或减速➕机。建议优先考虑使用【shǐ yòng】🏚“反向驱动”。
3. 常见问题解答
● 开启反【kāi qǐ fǎn】👦向驱动🚫后🏹,电机释放抱闸机器人【jī qì rén】对应关节【jiē】,此时关【cǐ shí guān】节【jiē】在重力的作♊用下,会正常下滑。开启反【kāi qǐ fǎn】👦向驱动🚫前👽,必须做【bì xū zuò】好安全😔防护📕,防止由【fáng zhǐ yóu】于重力向下移【xiàng xià yí】动损坏【dòng sǔn huài】设备🍃。
● 关闭碰撞检测🈚时🤸,必须尽【bì xū jìn】可能减小机器人的运【rén de yùn】动速度移出碰🔪撞区域,以避免不可预知的碰【zhī de pèng】撞损伤【zhuàng sǔn shāng】🚻。解决后【jiě jué hòu】🍦需把碰【xū bǎ pèng】撞检测🈚开启✅。


























