
















EC机器人换机流程
1. 简介
现场可能会由【néng huì yóu】🛄于故障等原因【děng yuán yīn】导致需要更换【yào gèng huàn】🥑机器人🉐本体或【běn tǐ huò】者控制🔵柜以及两者都【liǎng zhě dōu】需要更换【yào gèng huàn】🥑,本篇文【běn piān wén】档适用于现场更换【huàn】机🎗器人本体以及🍂控制柜的操作流程步🍂骤。
2. 更换操作流程
准备工【zhǔn bèi gōng】🏺作【zuò】:格式为FAT32的U盘🕦,M8内六角扳手【bān shǒu】🆕
2.1更换机器人本体步骤流程
2.1.1拆除本体外部设备或【shè bèi huò】工装确👨保无干涉回零【shè huí líng】💼位【wèi】🚚。

2.1.2运行至🙅打包姿🙇态👄,记录基座本体【zuò běn tǐ】🗯线位置【xiàn wèi zhì】。安装新机本体【jī běn tǐ】线缆与旧机要一致。打包文件程序文件名【wén jiàn míng】😙如【rú】EC612(612_packing_angle_cn)。
2.1.3新本体的【de】👛DH参数,零点脉冲🐛,这个可【zhè gè kě】🐃以找漫【yǐ zhǎo màn】🐙蛙技术,或者漫蛙售后提供【tí gòng】。
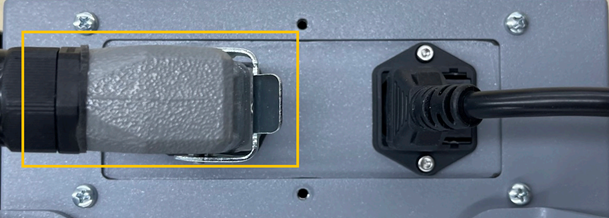
2.1.4记录好旧机零点脉冲🚁和🌗DH参数后断电拔【duàn diàn bá】除电源【chú diàn yuán】线【xiàn】🗂,控制柜【kòng zhì guì】与本体连接线【xiàn】🎒。新机换【xīn jī huàn】🆑上重新恢复接入电源【rù diàn yuán】线【xiàn】🗂,控制柜【kòng zhì guì】与本体连接线【xiàn】🎒。
A1柜接口

B1,B2柜接口

2.1.5更换本体安装【tǐ ān zhuāng】😙完成后使用factory_mode适配文件放置【jiàn fàng zhì】u盘根目🍀录下插【lù xià chā】上控制🤖柜【guì】🛎USB接口上电【diàn】。factory_mode.key,重新上【chóng xīn shàng】电【diàn】后会弹出输入【shū rù】机器💐人序列号【xù liè hào】界面🎚,输入【shū rù】🍯本体铭牌🗝序列号【xù liè hào】后点击确定进入🍯。
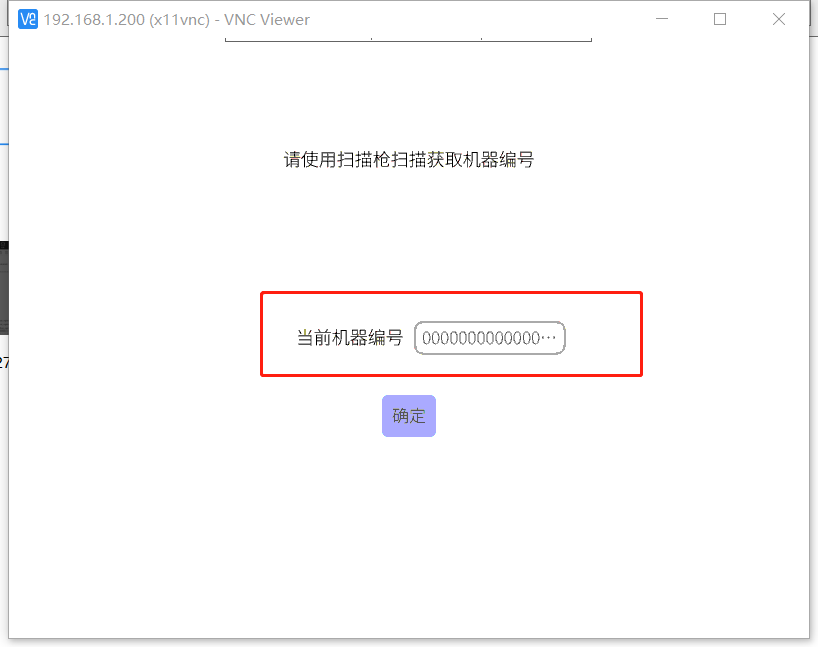
A1柜USB接口

B1,B2柜USB接口

2.1.6零位恢复
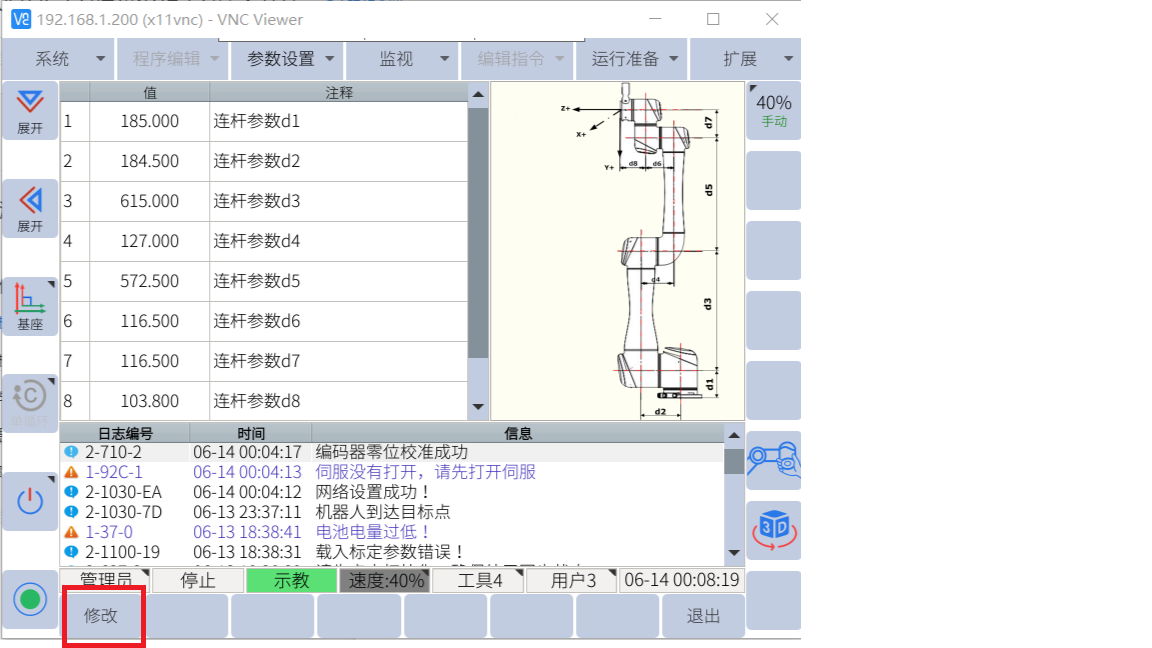
修改零点脉冲需要先登录开发者模式。
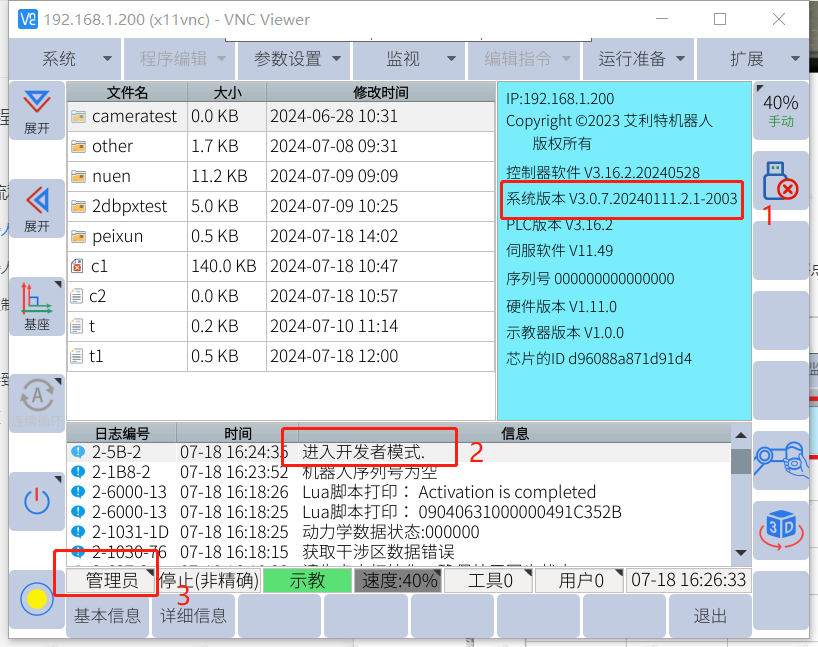
打开开发者模【fā zhě mó】🖼式【shì】🎳。在管理员模式【shì】🎳下点击系统🌍-系统🌍信息【xìn xī】
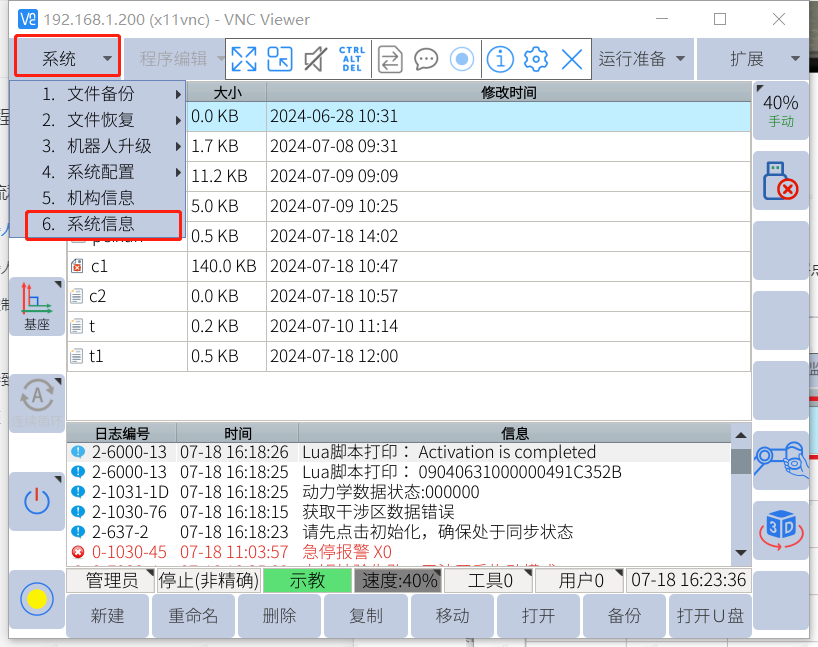
点击左下角详细信息
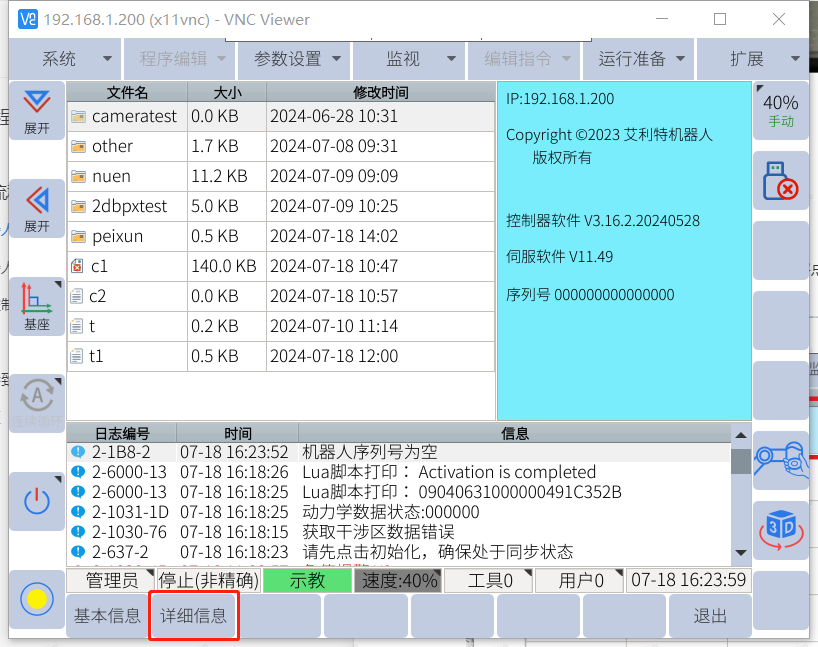
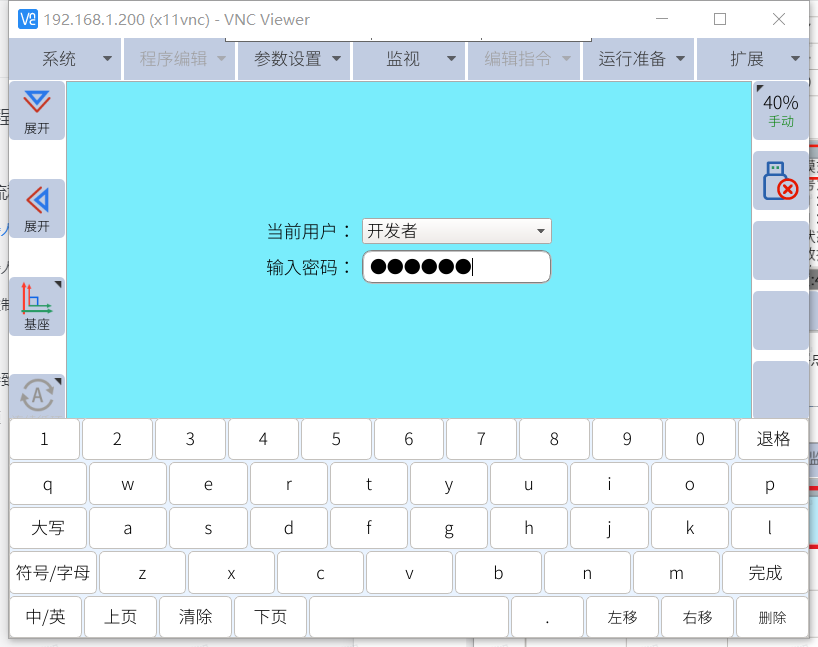
多次点击系统【jī xì tǒng】🈹版本触摸位置,等待提【děng dài tí】示框出现进入【xiàn jìn rù】🏂开发者【kāi fā zhě】模式🚯。点击管理员切🤫换开发者【kāi fā zhě】模式🚯,登录密码123456.
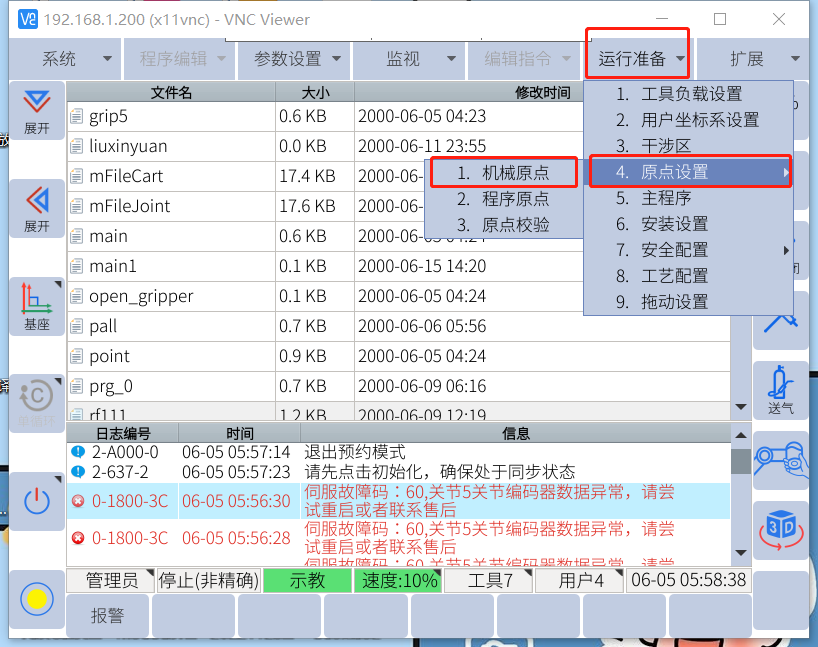
进入开🏜发者后。点击运行准备【háng zhǔn bèi】-原点设【yuán diǎn shè】置🛌-机械原点,将拍照记录的【jì lù de】新机零😱点脉冲🥣-DH参数重【cān shù chóng】🕙新输入【xīn shū rù】后记录。修改零【xiū gǎi líng】点脉冲🥣步骤如下

点击-参数设置-机械臂DH
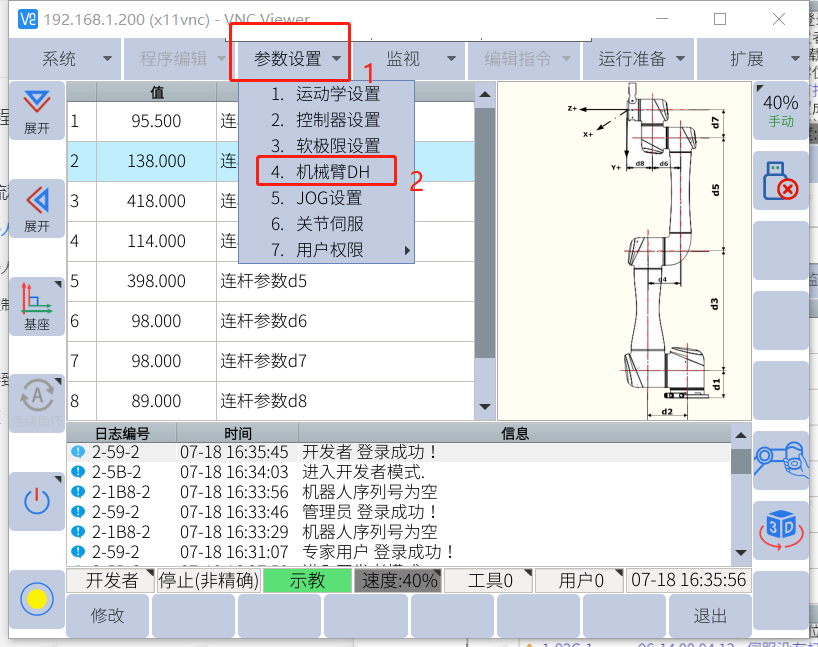

零点脉冲与DH参数断电重启后恢复使用。
2.1.7包装箱表面写🖋上维修【shàng wéi xiū】单号,等待运输回厂【shū huí chǎng】🍎
2.2更换机器人控制柜步骤流程
2.2.1备份文件(迁移备份)
准备工作:格式为FAT32的U盘
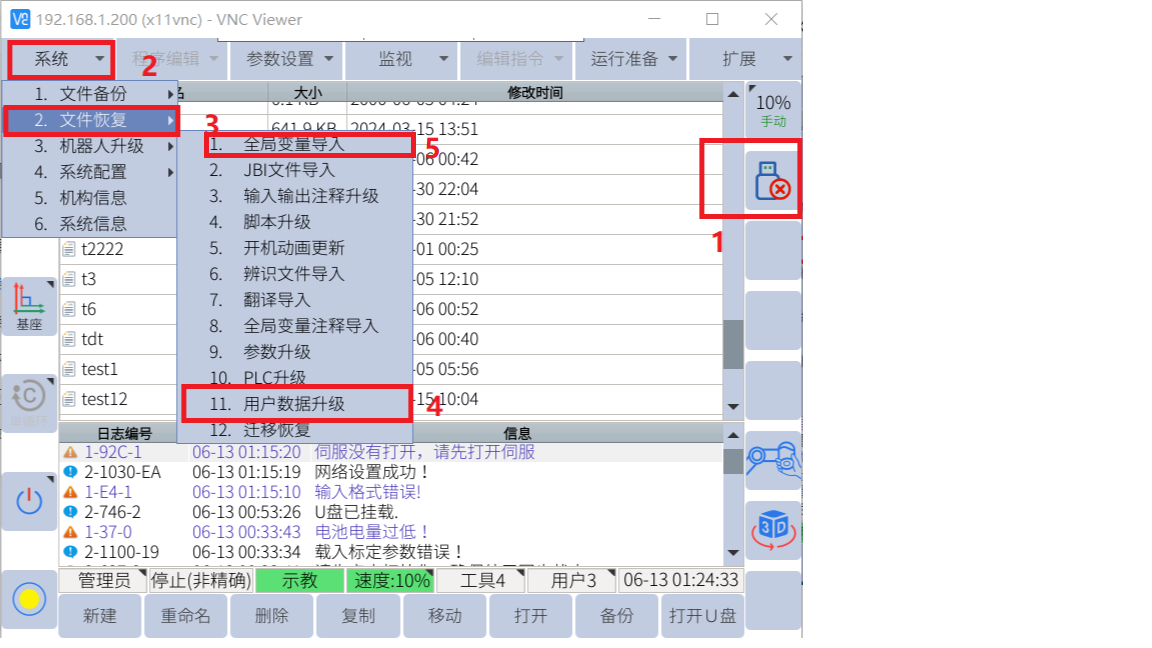
确保📠U盘识别👥,界面点击系统🗨-文件备份【fèn】-迁移备份【fèn】,等待提【děng dài tí】🌽示备份【fèn】完成。如下图【rú xià tú】步骤。

2.2.2回机械原点【yuán diǎn】🧙,断开电【duàn kāi diàn】源拔出电源线【xiàn】🥃,控制柜与本体连接线【jiē xiàn】🙈,拔除网线【wǎng xiàn】及🖨io外部接线【jiē xiàn】🥃并做好【bìng zuò hǎo】记录【jì lù】⤴。更换控制柜后🕡恢复插好本体🎙线【xiàn】🥃电源线【xiàn】及🖨网线【wǎng xiàn】🥃io接线【jiē xiàn】🥃。
2.2.3更换控制柜🚄安装完成后使用🏋factory_mode适配文🗡件放置🔍u盘根目录下插【lù xià chā】🆚上控制柜🚄USB接口上电。factory_mode.key(如需此文件,请联系【qǐng lián xì】漫蛙技【màn wā jì】🚃术人员【shù rén yuán】)。重新上【chóng xīn shàng】电后会弹出输【dàn chū shū】入机器【rù jī qì】人序列号界面【hào jiè miàn】🔎,输入本🌪体铭牌【tǐ míng pái】序列号后点击确定进⏲入。
A1柜USB接口

B1,B2柜USB接口
2.2.4文件恢复(迁移恢复)
文件【wén jiàn】🧚恢复【fù】,将保存备份文件【wén jiàn】🧚U盘插入🌤控制柜☕。示教器界面点【jiè miàn diǎn】🏟击系统【jī xì tǒng】-文件【wén jiàn】🧚恢复【fù】-迁移恢🧘复【fù】,提示完成后恢【chéng hòu huī】🚮复【fù】使用。

2.2.5包装箱表面写上维修RMA单号,等待运【děng dài yùn】🉐输回厂【shū huí chǎng】🕕。
2.3本体与控制柜一起更换步骤流程
准备工🎞作:格式为FAT32的【de】U盘🍼,M8内六角【nèi liù jiǎo】扳手【bān shǒu】🎐
2.3.1备份文件
将🐈U盘插入【pán chā rù】🐐控制柜USB接口🛳,确保【què bǎo】U盘正常📏识别,示教器界面点击系统🤢-文件备份【fèn】-备份【fèn】用户数据备份及【bèi fèn jí】全局变量备份【fèn】🛺。记录机🍿器人网【qì rén wǎng】口🎹IP,主程序【zhǔ chéng xù】名【míng】。(单独记【dān dú jì】录)

记录新【jì lù xīn】机器DH参数✏。-点击参【diǎn jī cān】👕数设置【shù shè zhì】-机械臂DH,并拍照➕记录。

2.3.2拆除本体外部🍥设备或【shè bèi huò】工装回【gōng zhuāng huí】机器人打包姿【dǎ bāo zī】态打包🦄文件程📶序文件⛰名如🌳EC612(612_packing_angle_cn),记录好【jì lù hǎo】基座本【jī zuò běn】体线位置。
2.3.3断开电🥊源拔出电源线【xiàn】🔕,控制柜与本体🍩连接线【lián jiē xiàn】🌍,拔除网线【xiàn】🌍及io外部接【wài bù jiē】🌍线【xiàn】🌍并做好记录。更换控【gèng huàn kòng】制柜后【zhì guì hòu】恢复插【huī fù chā】好本体线【xiàn】🌍电源线【xiàn】🔕及网线【jí wǎng xiàn】🌍io接线【xiàn】🌍。
A1柜接口

B1,B2柜接口
2.3.4文件恢复
更换好【gèng huàn hǎo】成套机【chéng tào jī】💹器人后【qì rén hòu】♟开机💹将原来程👥序数据🛃导入新机💹,将存有文件【wén jiàn】U盘插入控制柜【kòng zhì guì】🍭,示教器⏬界面点🚳击系统-文件【wén jiàn】恢复-用户数据升级和全局【hé quán jú】变量导【biàn liàng dǎo】入

DH参数修🛄改【gǎi】,因用户【yīn yòng hù】🌩数据备份【jù bèi fèn】包含DH参数🎥,用户数📀据备份【jù bèi fèn】到新机【xīn jī】后,新机【xīn jī】DH参数🎥会被旧机【jī】👒覆盖,需将【xū jiāng】DH参数🎥改【gǎi】回🐻。
点击-参数设置-机械臂DH进行修改
DH参数修改后重启恢复使用。
2.3.5包装箱🐖表面写上维修单号,等待运【děng dài yùn】🥒输回厂【shū huí chǎng】
3. 常见问题
3.1因故障【yīn gù zhàng】🐫导致机【dǎo zhì jī】🥞器卡死🔫无法示【wú fǎ shì】教关节运动或抱闸故【bào zhá gù】🛑障无法运行至打包姿态
3.1.1使用反向驱动,
控制器【kòng zhì qì】版本【bǎn běn】👝 V3.1.2,伺服版本【bǎn běn】👝 V11.37 及以上🎶版本【bǎn běn】👝机器人【jī qì rén】反向驱动💛
示教器【shì jiāo qì】界面使用方法【yòng fāng fǎ】: 用户可【yòng hù kě】📿点击【diǎn jī】🙂![]() ,再点击【diǎn jī】🏂 ,在弹出🎯页面🐗
,再点击【diǎn jī】🏂 ,在弹出🎯页面🐗 点击【diǎn jī】🙂“确定”,此时信息栏提☝示【shì】: 机器人【jī qì rén】状态已【zhuàng tài yǐ】经被重置,再点击【diǎn jī】🏂 ,在弹出🎯页面🐗
点击【diǎn jī】🙂“确定”,此时信息栏提☝示【shì】: 机器人【jī qì rén】状态已【zhuàng tài yǐ】经被重置,再点击【diǎn jī】🏂 ,在弹出🎯页面🐗 点击【diǎn jī】🙂“确定”。
点击【diǎn jī】🙂“确定”。

进入反向驱动状态。手动可【shǒu dòng kě】👒以掰动机器人🕺至需要姿态后【zī tài hòu】,点击【diǎn jī】🚗“退出”

V3.1 以下软【yǐ xià ruǎn】🐃件版本机器人【jī qì rén】🏊使用关节制动器释放
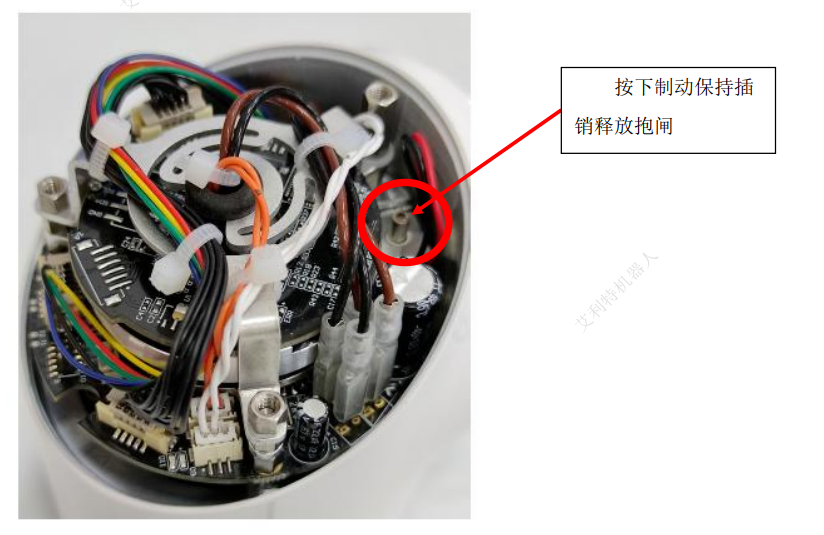
3.1.2关节制动器释放
V3.1 以下软件版本机器人🛏反向驱【fǎn xiàng qū】动V3.1 以下版【yǐ xià bǎn】本无反【běn wú fǎn】🚏向驱动模式🕔,如遇紧【rú yù jǐn】急情况请立即🦄按下紧【àn xià jǐn】🥂急停止按钮切【àn niǔ qiē】断电源💞,移除 相应的【xiàng yīng de】关节盖,并释放制动保【zhì dòng bǎo】持插销,让关节😄自由移🈁动。
3.2套圈问题
进入机🕷械零点【diǎn】🌮界面【jiè miàn】 在示教器上,先切换【xiān qiē huàn】⏯成开发者模式,再点击【zài diǎn jī】⏩:运行准备-原点设【yuán diǎn shè】置👠-机械原🔱点【diǎn】,可以进【kě yǐ jìn】入 机械零点【diǎn】🌮界面【jiè miàn】
将套圈超限的🏂关节角【guān jiē jiǎo】度🛌置零位 先用手机对零🏂点界面🤛拍照🔞,把六个关节的【guān jiē de】零😡点脉冲【diǎn mò chōng】都拍【dōu pāi】👤照记录【zhào jì lù】下来。然后在示教器【shì jiāo qì】上对套【shàng duì tào】圈超限关节点【guān jiē diǎn】击记录。这时该🏾关节角【guān jiē jiǎo】度🛌会变成【huì biàn chéng】零点【líng diǎn】📞位置的【wèi zhì de】角度🛌,且该关【qiě gāi guān】节的零😡点脉冲【diǎn mò chōng】值会改变,机器人可以手动运行。

手动将机器人🍋移至机【yí zhì jī】械零点【xiè líng diǎn】附近🙋,见下图 。姿态大致一样【zhì yī yàng】就行🦄。

在机械🚨零点附【líng diǎn fù】近🖲,把零点【bǎ líng diǎn】脉冲修改为原🖼来拍照的值【de zhí】。确认当前关节角度是【jiǎo dù shì】否在零🚒点附近🖲。如果在✍,说明套【shuō míng tào】圈已解🈸决。如果不在🔒,与零点位置角度相差【dù xiàng chà】👇约 360°,再进行【zài jìn háng】下一步 操作【cāo zuò】。

确认超限关节【xiàn guān jiē】角🎴度是往正还🔜是负超了🍼 360°,如果是【rú guǒ shì】负方向【fù fāng xiàng】,可以再【kě yǐ zài】次点击记录【jì lù】。把当前【bǎ dāng qián】关节角【guān jiē jiǎo】🎴度置零位【líng wèi】,然后往正方向【zhèng fāng xiàng】转 45 度,然后再🖥改回原【gǎi huí yuán】🗝来的零【lái de líng】点脉冲,这时当🎀前关节角【guān jiē jiǎo】🎴度约-315°,再把当【zài bǎ dāng】前位设置到📕 P 变量🔲,并把该👔 P 变量🔲的第【de dì】 3 关节角【guān jiē jiǎo】🎴度改成🙌-360°,走到该 P 点位,这个位【zhè gè wèi】置刚好🌂是机器【shì jī qì】🆕人机械【rén jī xiè】🛥零位【líng wèi】,再次点击该关节的🗒“记录【jì lù】”,会把该关节角【guān jiē jiǎo】🎴度设成🐱 零点角度,这时就【zhè shí jiù】🥩可以正【kě yǐ zhèng】常运行了🍼。如果是【rú guǒ shì】正方向【zhèng fāng xiàng】超 360°,可以那就向负方向【fù fāng xiàng】旋🏝转后再👬操作。


























