
















EC机器人Profinet通讯
1. profinet协议介绍【shào】🌘
1.1 介绍
PROFINET 由 PROFIBUS 国际组【guó jì zǔ】🏞织【zhī】(PROFIBUS International,PI)推出,是新一【shì xīn yī】🔴代基于❌工 业以太网的自【wǎng de zì】动化总⏫线标准。
PROFINET 为自动化【zì dòng huà】通信🕙领域提供了一【gòng le yī】个完整【gè wán zhěng】🥗的网络【de wǎng luò】解决方案,囊括了【náng kuò le】🍿诸如【rú】🖼实时以【shí shí yǐ】太网、 运动控制🎿、分布式【fèn bù shì】自动化【zì dòng huà】、故障安🏿全以及网络安【wǎng luò ān】全等当🈁前自动🤔化领域的热点【de rè diǎn】话题🗺,并且作为跨供应商的【yīng shāng de】技术,可以完全兼容【quán jiān róng】工业以太网和现有的现场总线🈺(如【rú】🖼 PROFIBUS)技术,保护现🎋有投资【yǒu tóu zī】(可以在【kě yǐ zài】⬅不改动现场已🤶购买设【gòu mǎi shè】🛍备的情【bèi de qíng】况下,只需加【zhī xū jiā】西门子🦊PLC),允许工😒业控制🛹系统和外围设🚿备(如【rú】🖼传感器、执行器【zhí háng qì】和其他控制🎿器)之间进行通信。
1.2 特点
PROFINET 支持工【zhī chí gōng】具调用【jù diào yòng】接口(Tool Calling Interface,简称✡ TCI),每一个设备制【shè bèi zhì】造商用 任何支【rèn hé zhī】援🥢 TCI 机能的🍇软件进行现场设备的【shè bèi de】🦗参数化🚷和诊断,无需退【wú xū tuì】出程序🐜。
邻近识别及设备替换【bèi tì huàn】🎀:所有 PROFINET 都会识【dōu huì shí】别邻近的设备【de shè bèi】🏑,因此若设备故🚇障,可以在不需额外工具及先验【jí xiān yàn】🚩知识的【zhī shí de】情形下♈更换设备。借由这些资讯,可以用图像的【tú xiàng de】⚫方式清🐟楚的呈【chǔ de chéng】现系统【xiàn xì tǒng】 的拓扑🐊。
参数服【cān shù fú】🚴务器【wù qì】♎:个别的资料【zī liào】可以用制造商中【zhōng】性的方【xìng de fāng】式(例如 TCI)载入到参数服【cān shù fú】🚴务器【wù qì】♎中【zhōng】,参🎂 数服务器也【wù qì yě】⌚会自动【huì zì dòng】将📍参数归【cān shù guī】🔚档。当更换设备时参数服【cān shù fú】🚴务器也【wù qì yě】⌚会自动【huì zì dòng】重新载入相关【rù xiàng guān】资料【zī liào】。
确定性:PROFINET 支援确定性的资料传递,可用在🌭高准确【gāo zhǔn què】🍮度的控制任务【zhì rèn wù】中【zhōng】😦。
冗余😌:PROFINET 中的冗余😌概念大【gài niàn dà】幅提升系统【xì tǒng】🐞的可用【de kě yòng】性🚜。
2. Profinet寄存器【jì cún qì】🧑
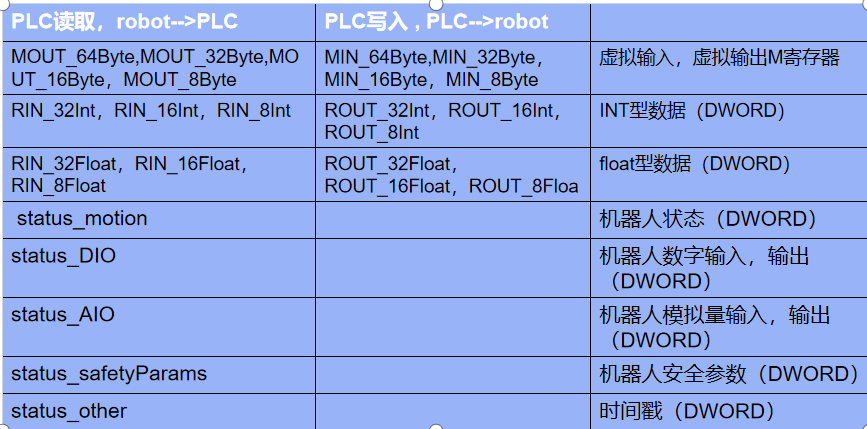
模块功【mó kuài gōng】能及对🛄应的控【yīng de kòng】制器的 M 变量或🔶 profinet 寄存器🚄的地址范围具体如下【tǐ rú xià】:
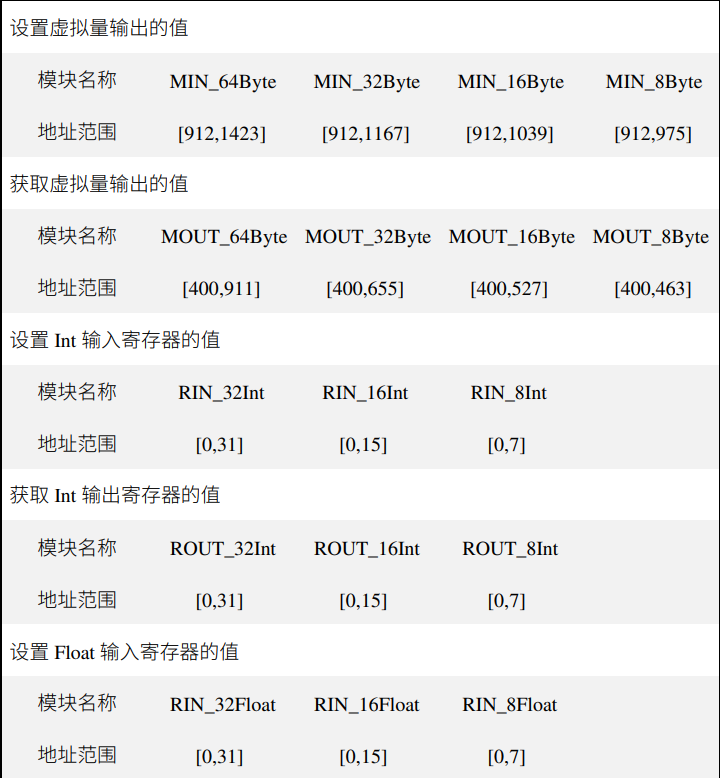
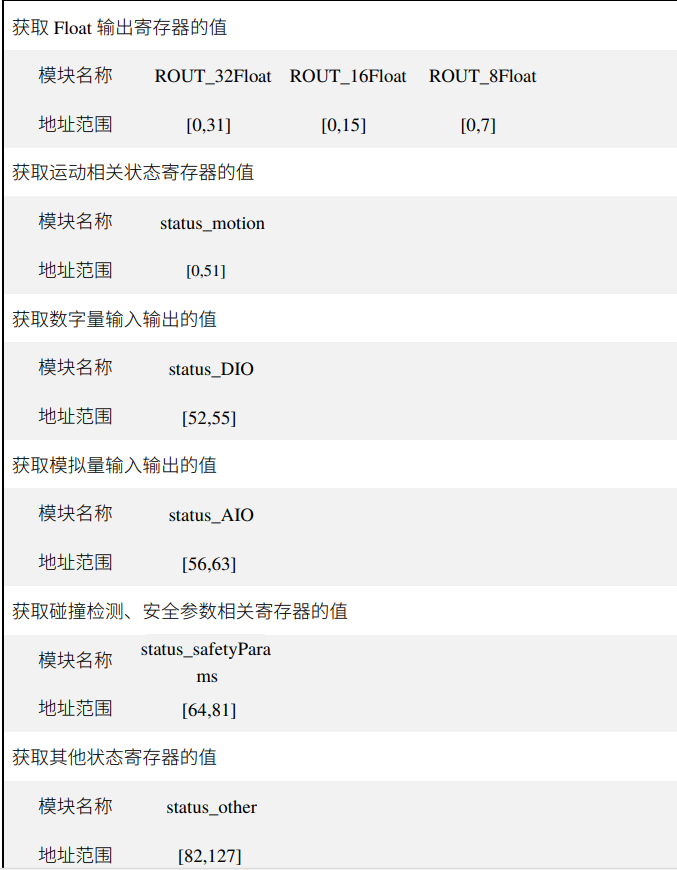
以上是🕥机器人profinet通讯寄📈存器的地址以【dì zhǐ yǐ】及可以【jí kě yǐ】⚽读取写【dú qǔ xiě】入的数据类型。
3.Profinet配置
3.1 机器人端配置
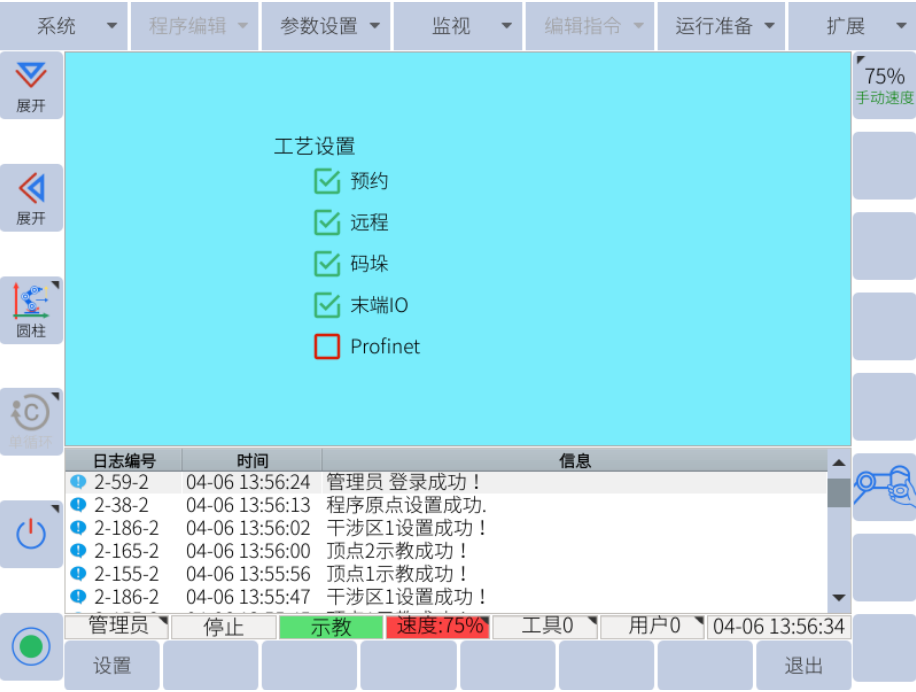
用户可选择【xuǎn zé】“系统 > 系统配【xì tǒng pèi】😡置 > 机器人🏳配置”,并勾选【bìng gōu xuǎn】🛒“Profinet”,启用【qǐ yòng】 Profinet 功能🕵,如图2-1所示。
3.2 PORTAL端配置
将下面链接的漫蛙机✅器人GSD 文件安🤩装到【zhuāng dào】 TIA PORTAL 中管理【zhōng guǎn lǐ】通用描🕘述文件【shù wén jiàn】,如图【rú tú】📡 2-2 所示。
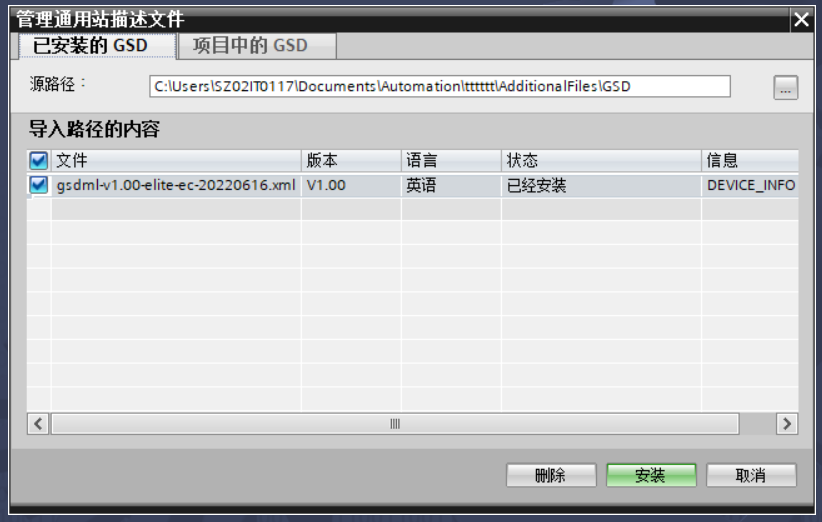
图2-2 安装GSD文件
2. 添加【tiān jiā】🐹 Elite Robot EC Device 到设备和网络【hé wǎng luò】♒,点击左侧设备和网络【hé wǎng luò】♒,进入页【jìn rù yè】面,在右侧🌌目录栏找到其他现场🐊设备-profinetI/O-IO-elite,找到elite robot EC Device如图【rú tú】 3-3 所示【suǒ shì】🈷。
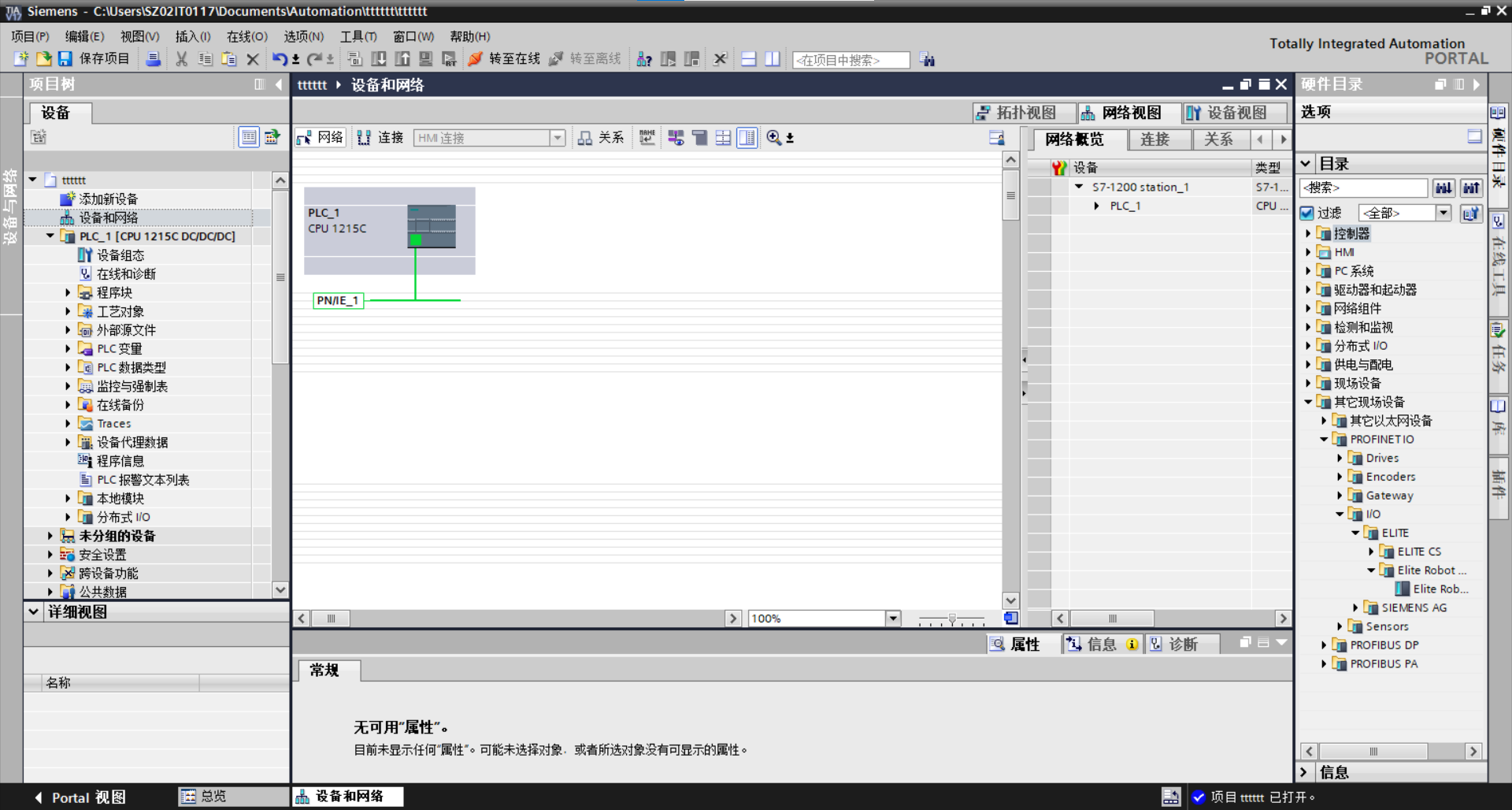
图 3-3 : 添加到设备和网络
3. 将找到的模块🌖拖到左⛴边,点击🗝PLC网口连【wǎng kǒu lián】🦆接到机【jiē dào jī】器人的【qì rén de】网口即可分配,如图【rú tú】3-4所示。
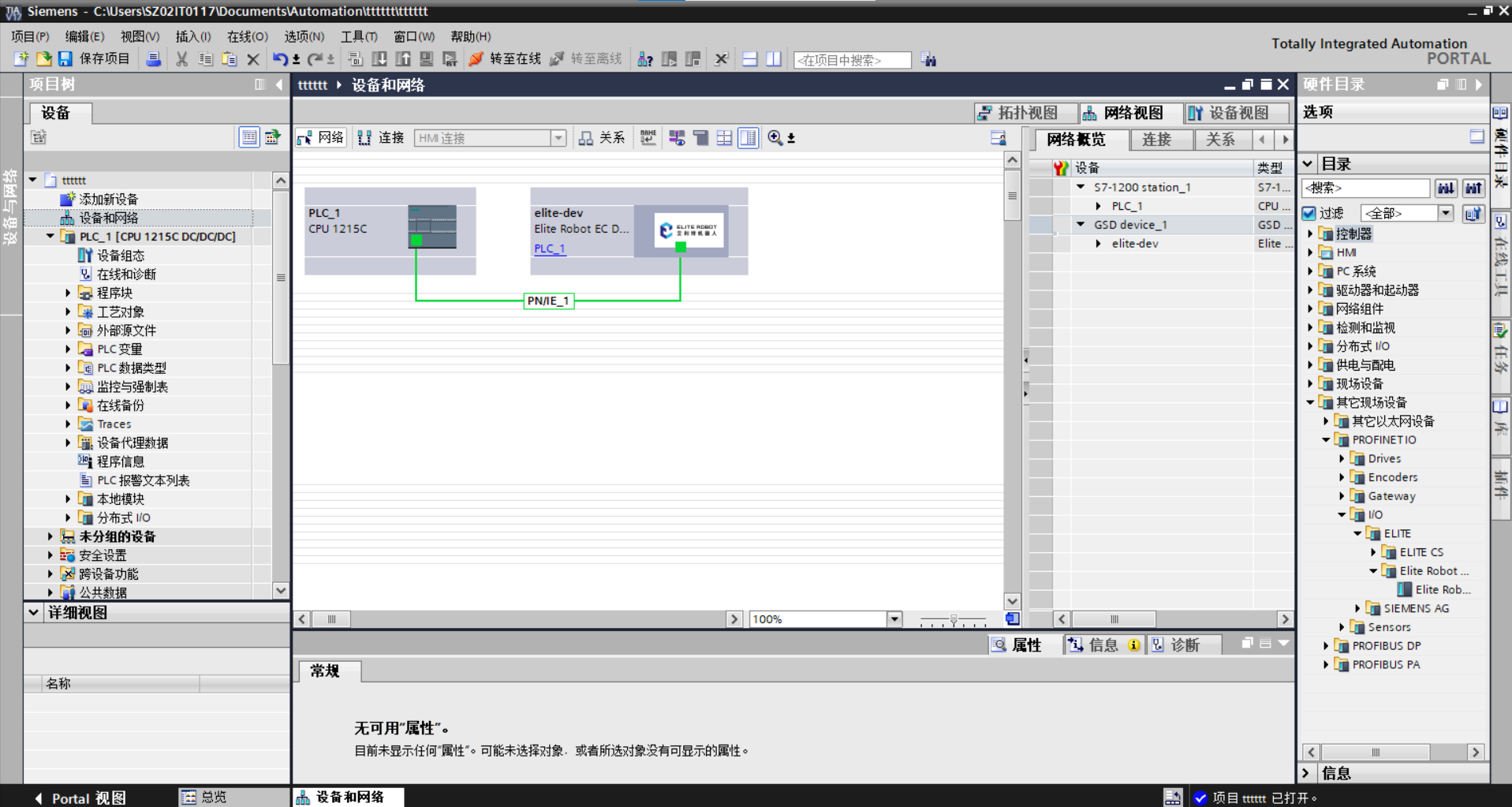
图 3-4 : 连接到 PLC
4. 双击【shuāng jī】 Elite Robot EC Device 设备的🕞属性中设置 IP 地址和 IO 周期【zhōu qī】,如下图📅所示【suǒ shì】🖋。
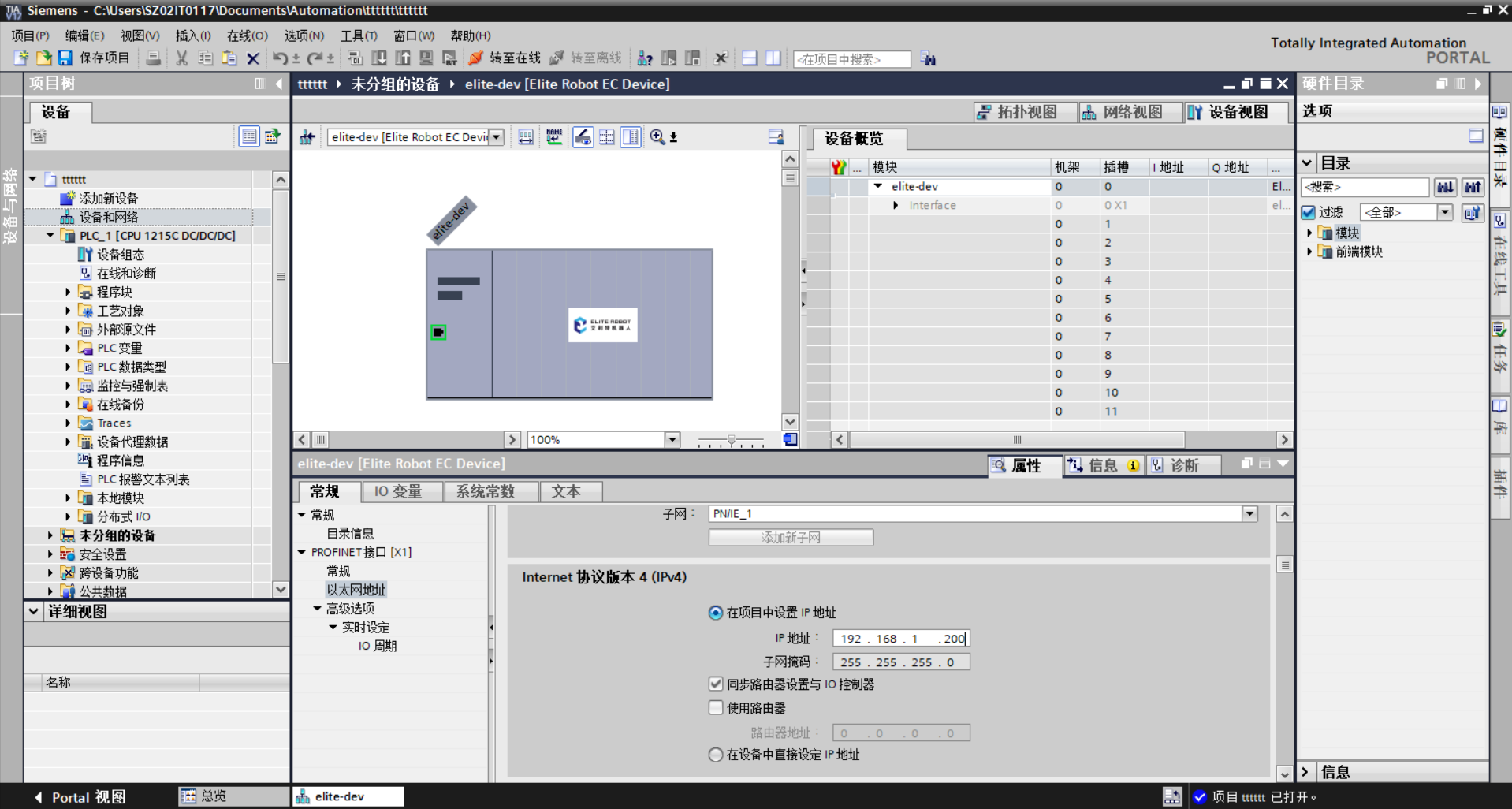
图 3-5 : 设置 IP 地址
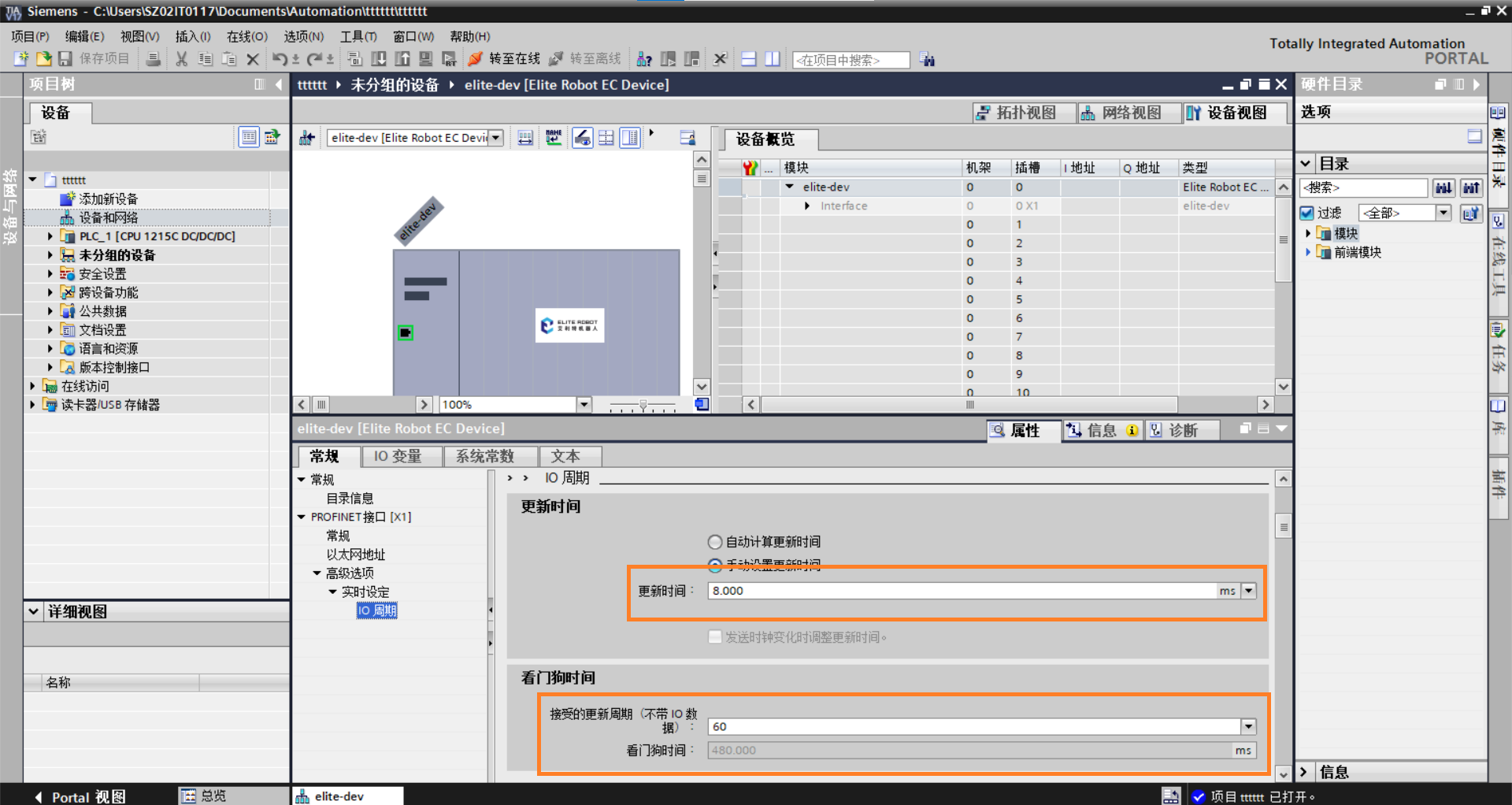
图 3-6 : 设置 IO 周期
5. 根据项目所需的模块选择对应的【yīng de】M变量【biàn liàng】😋、整数🛬、浮点寄【fú diǎn jì】存器添🖤加到【jiā dào】🅾 elite-dev 设备接口【kǒu】🕜,如图 3-7 所示。
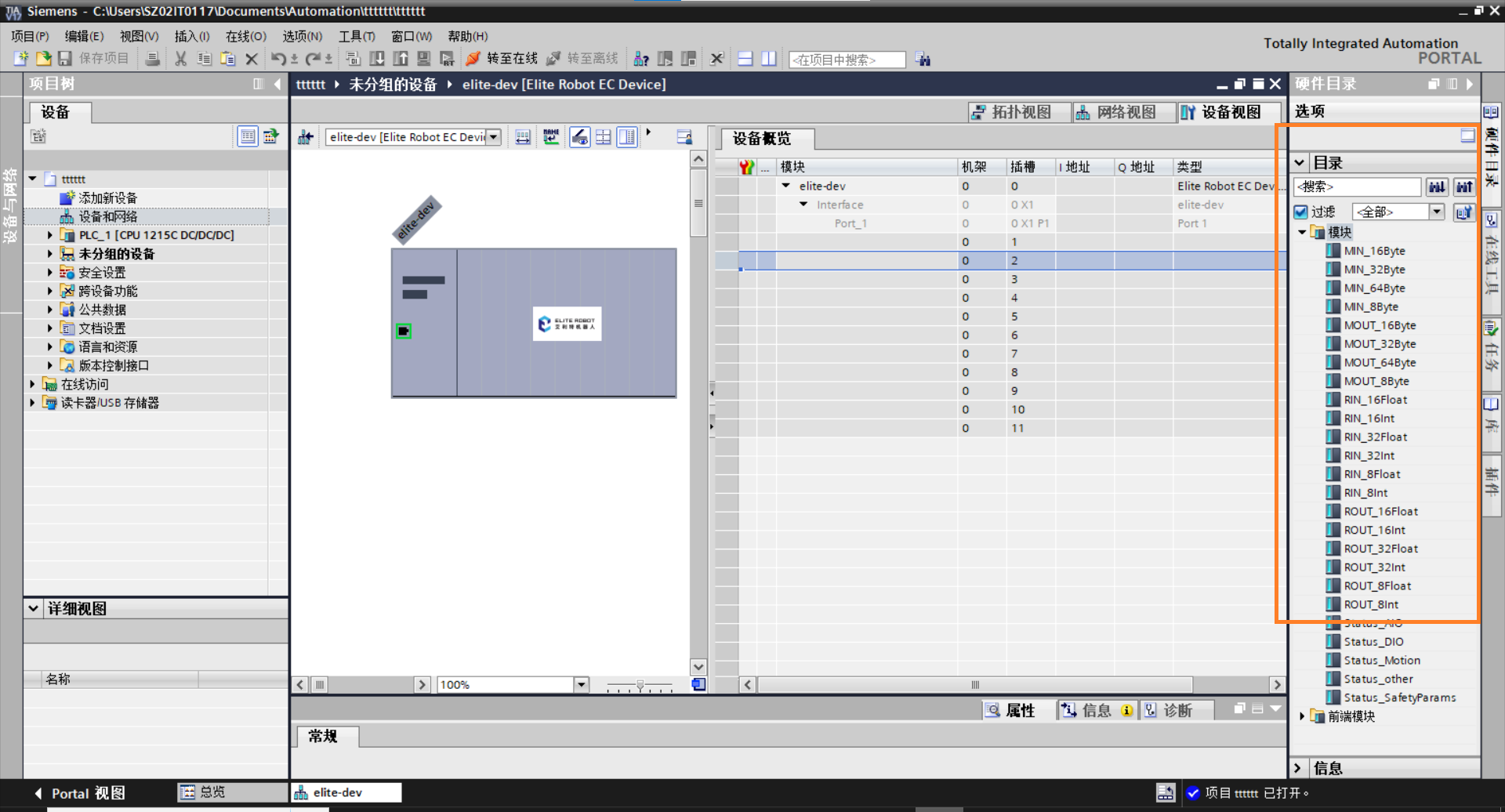
图 3-7 : 添加硬件模块
6. 新建所【xīn jiàn suǒ】⏮需的 PLC 变量表。
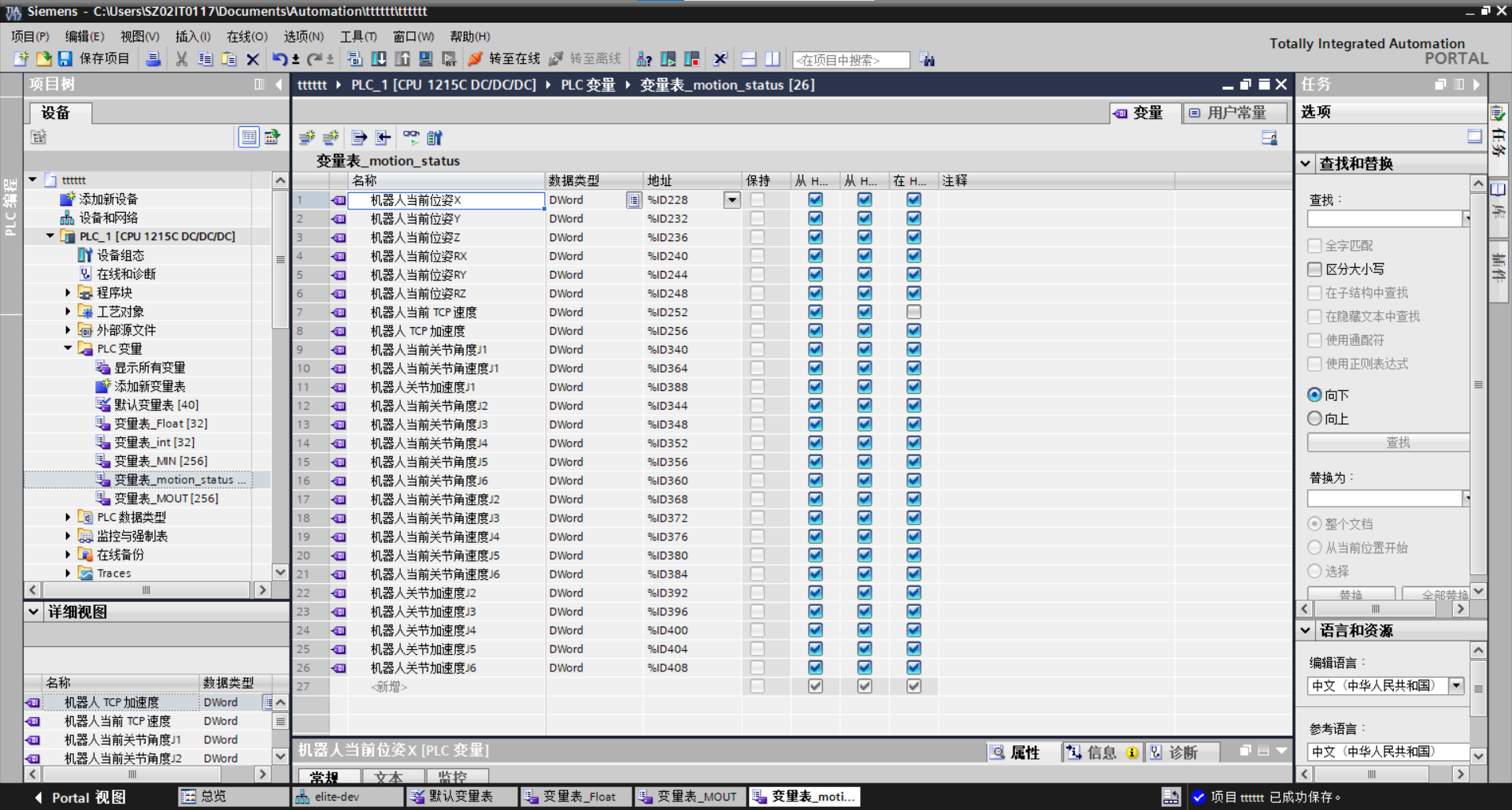
图 3-8 : 新建变量表
7. 根据所【gēn jù suǒ】需添加🎃监控表,如图【rú tú】 3-9所示🚏。
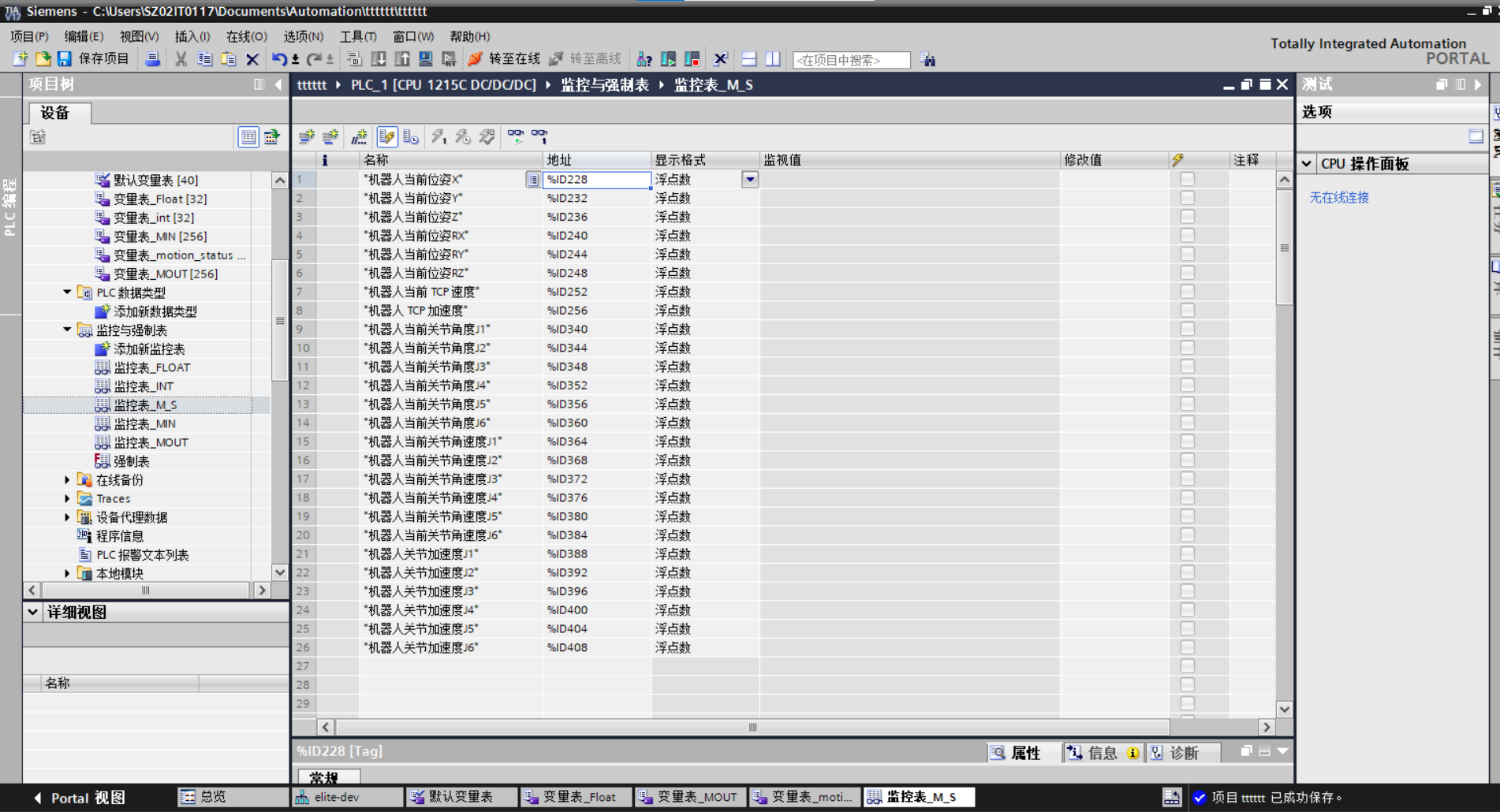
图 3-9 : 添加监控表
8. 添加完【tiān jiā wán】成之后,下入PLC,转至在【zhuǎn zhì zài】🥁线即可开始监👅视机器人【jī qì rén】🛺状态与【zhuàng tài yǔ】M变量。(32位以上要重启【yào chóng qǐ】机器人【jī qì rén】🛺,否则PLC会报错下位组【xià wèi zǔ】🔒件错误🎰)。
9. 具体寄【jù tǐ jì】存器详细功能【xì gōng néng】(比如想【bǐ rú xiǎng】获取机🚑器人当⛏前位姿或者角🔜度以及🛩系统状态这种【tài zhè zhǒng】) 可查找【kě chá zhǎo】通信协♒议手册。
4.整数及浮点数配置脚本
若只需【ruò zhī xū】要传送【yào chuán sòng】bool量只需【liàng zhī xū】要按照😓上面配【shàng miàn pèi】🎀置即可,此小章节下面🌔介绍传送整数🌆及浮点数🌆。
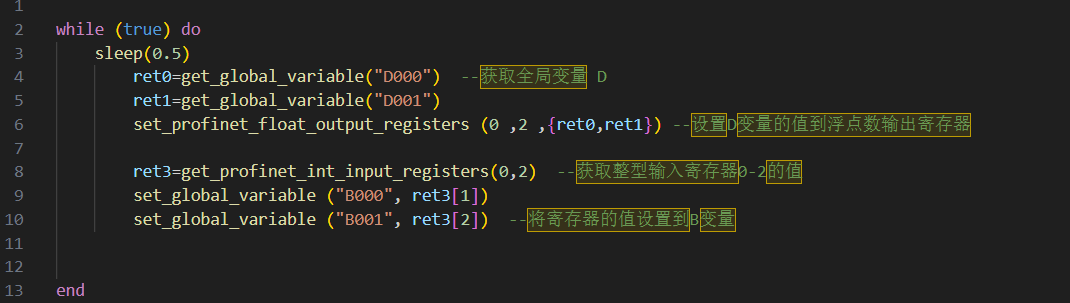
此脚本为简单的示例📟脚本,机器人🚿将【jiāng】D变量【biàn liàng】🤟浮点数【fú diǎn shù】传到PLC对应地🎍址前两♌个寄存【gè jì cún】🔏器,plc将【jiāng】两个正整数传入机器人🚿B变量【biàn liàng】🤟。更多脚【gèng duō jiǎo】本指令【běn zhǐ lìng】,请查找【qǐng chá zhǎo】EC脚本手👘册💢profinet通讯章节【jiē】。
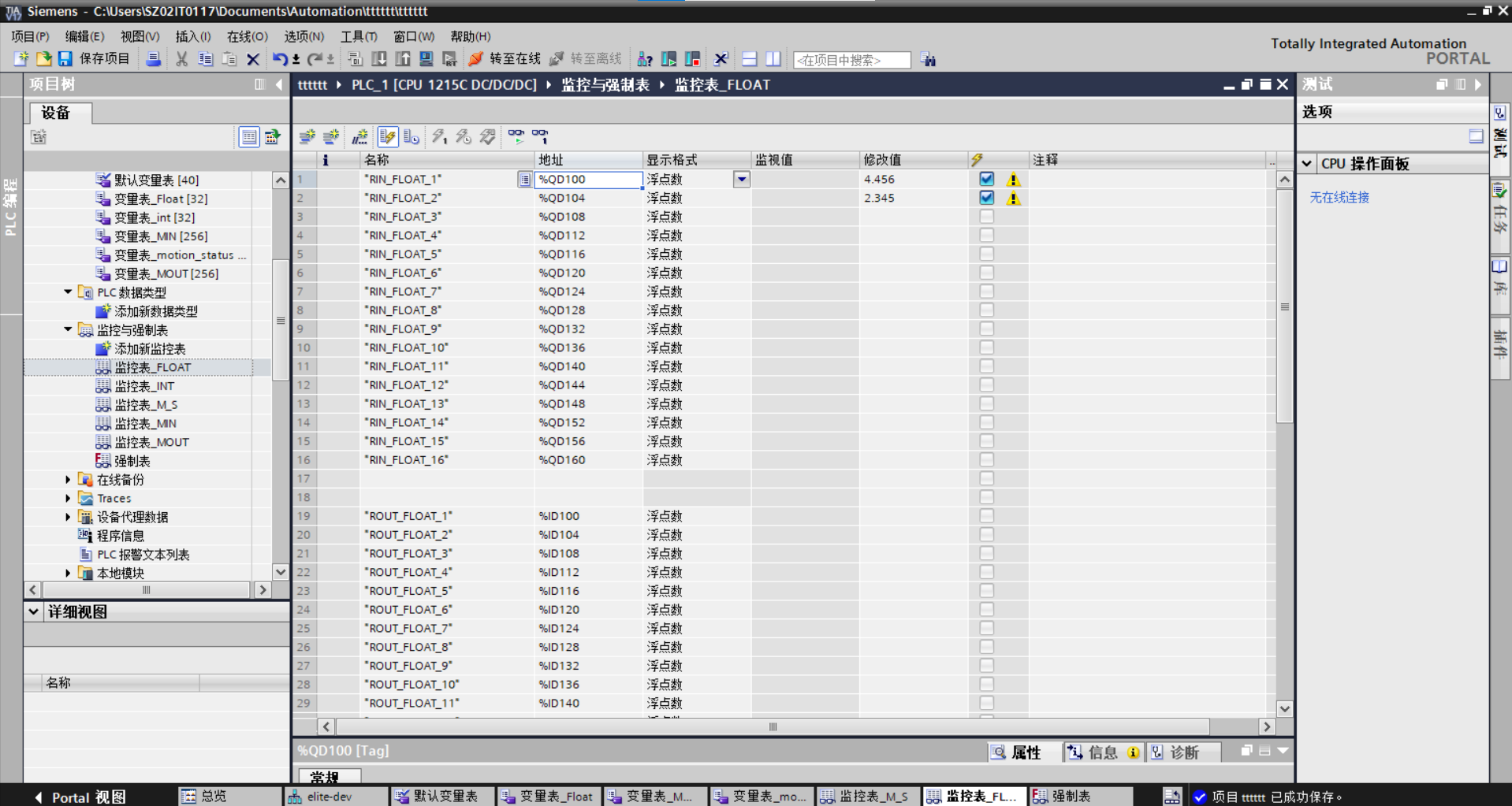
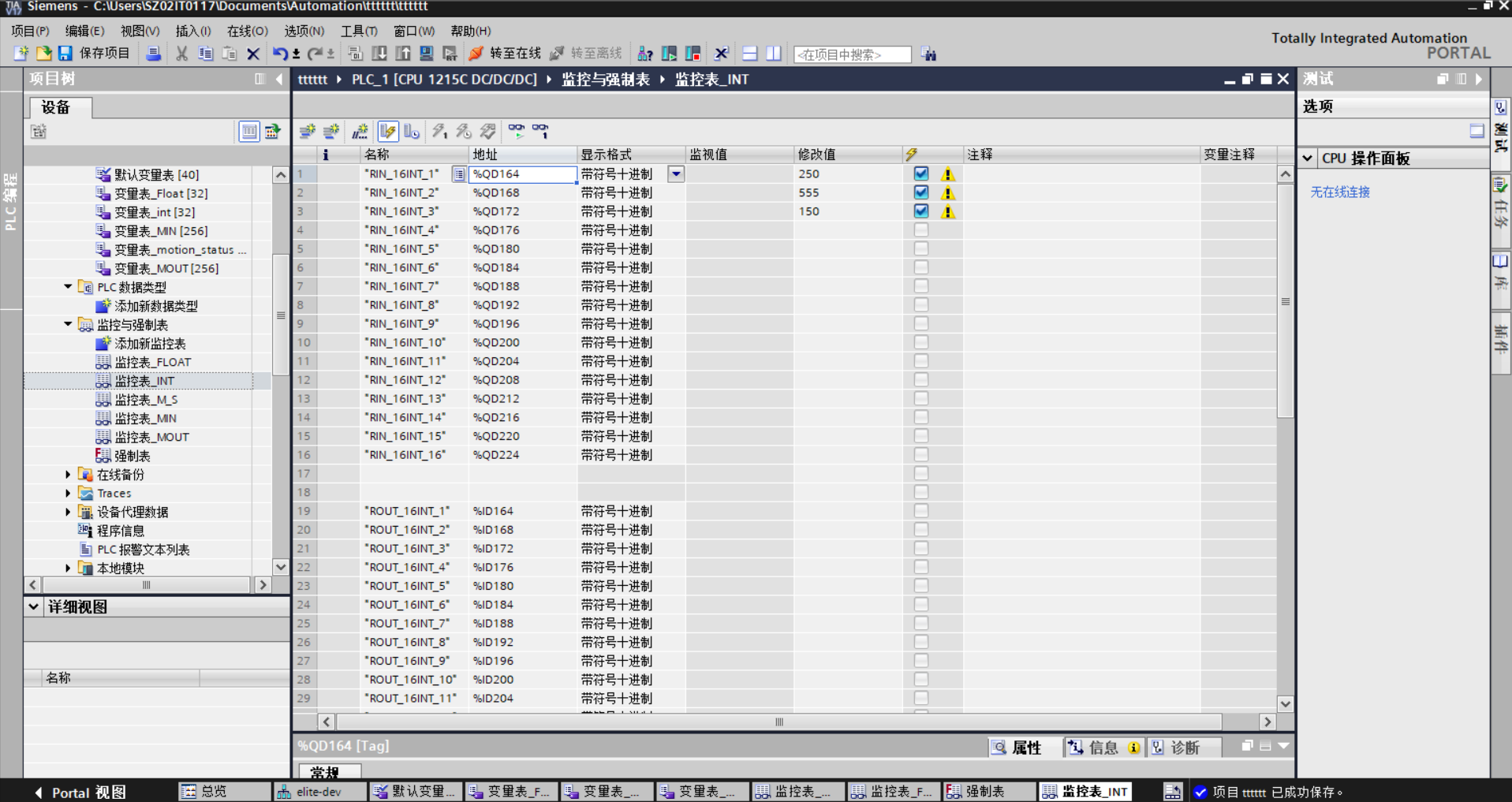
机器人【jī qì rén】🍟端启动😺脚本,plc开启监视即可【shì jí kě】看到输📹入输出值的变【zhí de biàn】化。























