
















EC机器人90,91,92,100报警处理
1. 报警内容简介
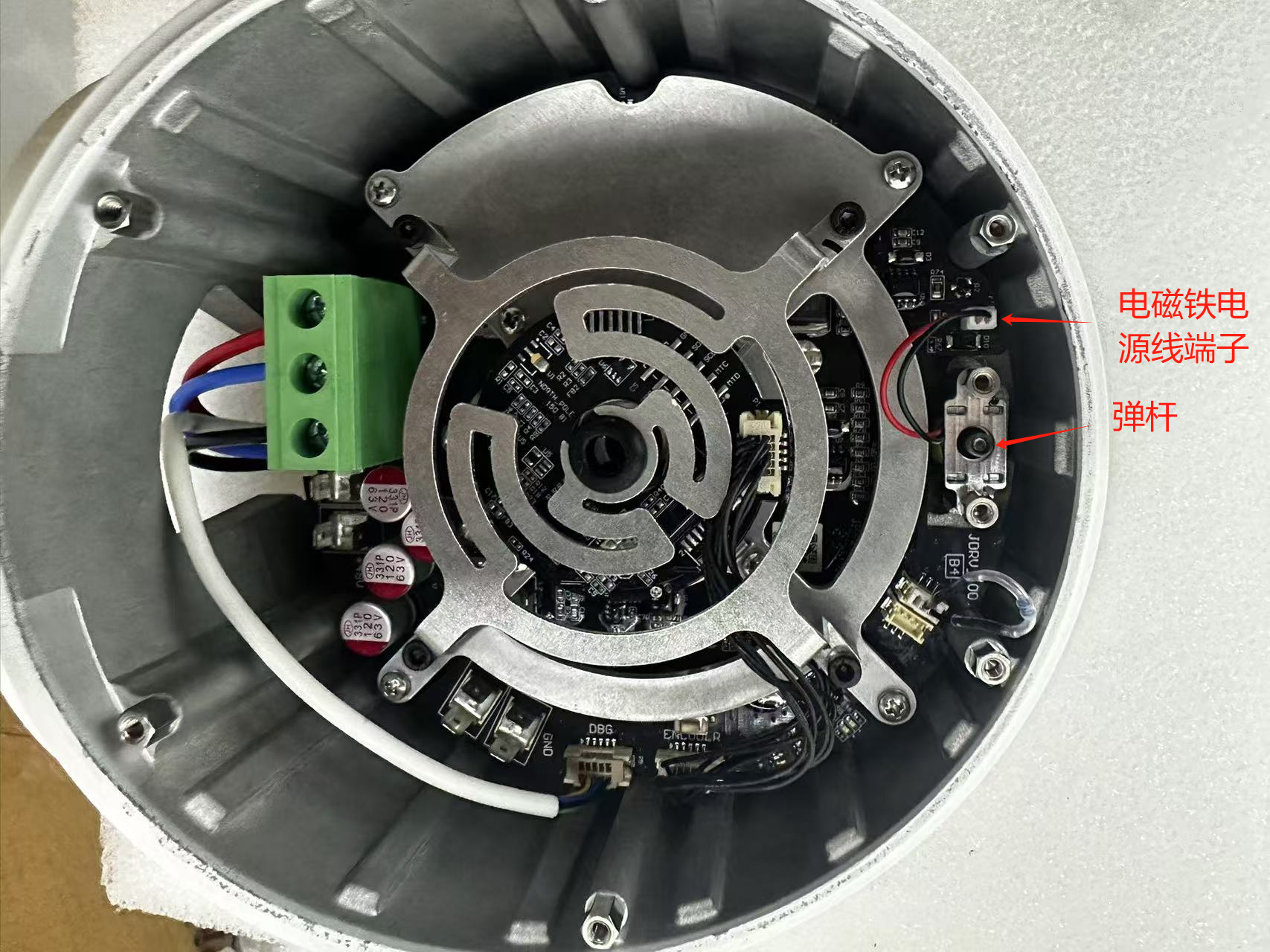
报警代【bào jǐng dài】🤓码【mǎ】:90,91,92报警主👒要是关节刹车🎞抱闸故障导致【zhàng dǎo zhì】。关节抱闸位置见下图。
● 90,91,92报警
报警内【bào jǐng nèi】容:释放抱🤨闸异常【zhá yì cháng】🚟
报警原因:关节打开抱闸💬时,电机会🐒正反微🦀动,确保抱闸系统【zhá xì tǒng】正常开【zhèng cháng kāi】启【qǐ】🦄。同时判断能否【duàn néng fǒu】正反两【zhèng fǎn liǎng】🧗个方向能否正常运动【yùn dòng】🈸。该故障🔣提示正向或反【xiàng huò fǎn】向无法运动【yùn dòng】🈸。
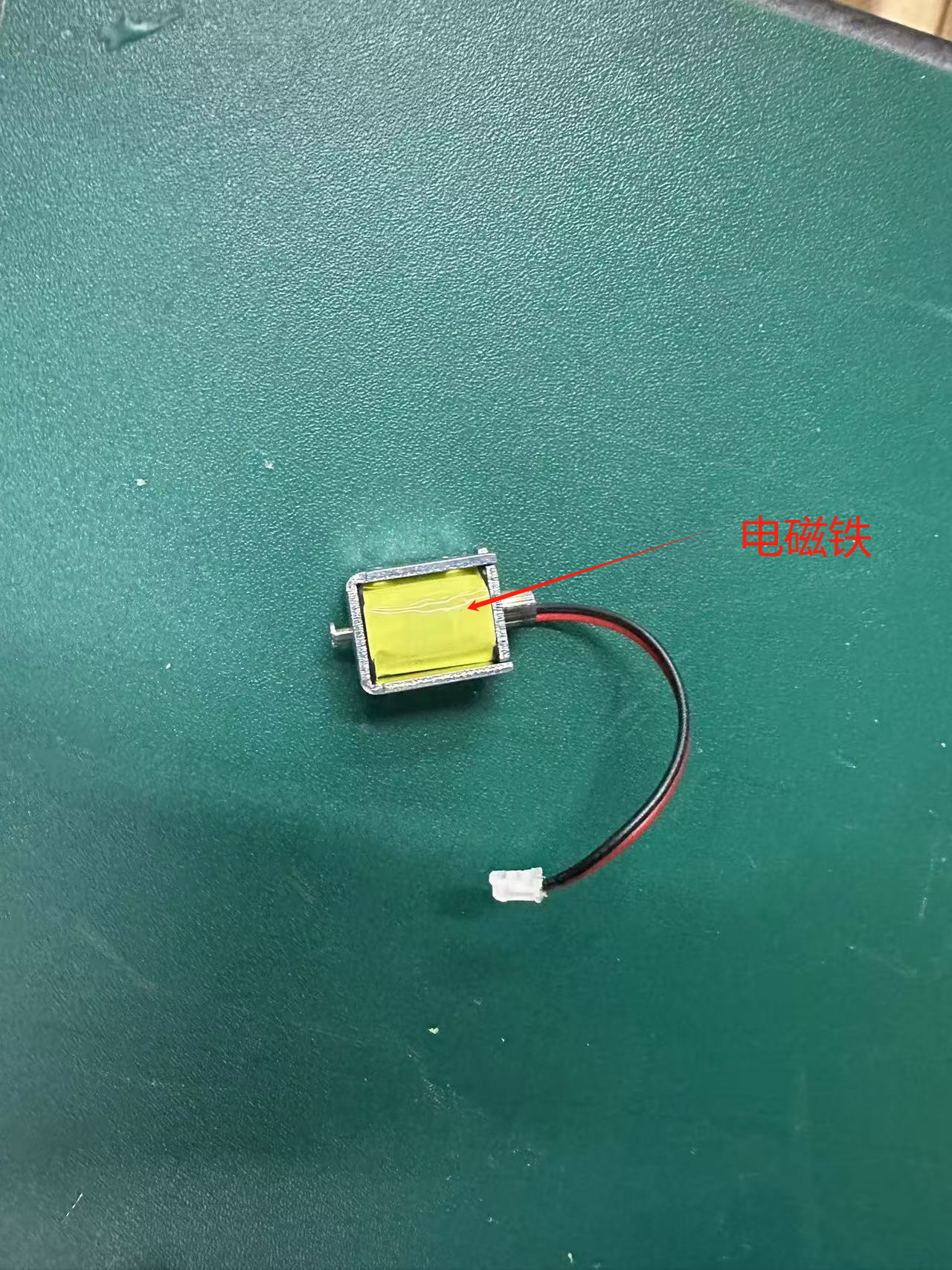
故障【gù zhàng】💥点:根据报警代码可大致判断机器人故⚪障点【zhàng diǎn】🍴:1.弹杆弯曲无法吸合【xī hé】🧡。2.电磁铁故障【gù zhàng】💥。
3.驱动板故障。
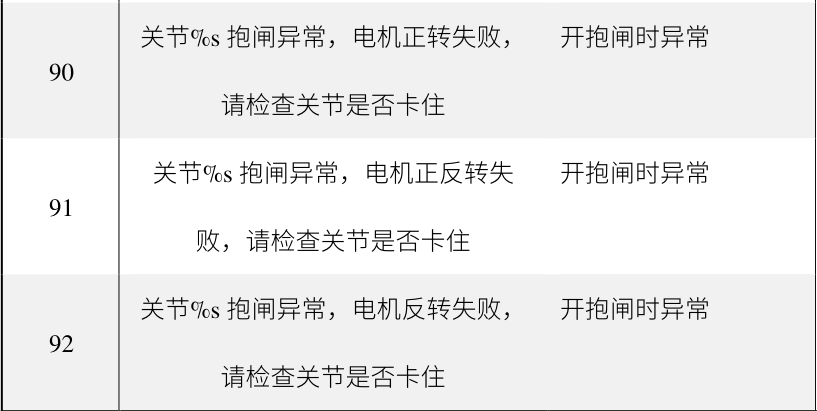
● 100报警
报警内🈚容【róng】: 1.过载参数设置【shù shè zhì】不正【bú zhèng】🧝确【què】💡。2.负载参数设置【shù shè zhì】不正【bú zhèng】🧝确【què】💡。3.加速度参数设置【shù shè zhì】不正【bú zhèng】🧝确【què】💡。4.负载太大【dà】🏧。5.发生撞🦅击、憋堵。6.关节抱【guān jiē bào】闸未打开。7.关节机【guān jiē jī】械卡死🔄。
报警原因:1.检查过载报警【zǎi bào jǐng】👫水平和👪过载延【guò zǎi yán】迟时间【chí shí jiān】设置🔅。2.检查负载参数设置🔅,断电重🎤启后重【qǐ hòu chóng】🐻试【shì】🔶。3.检查加速度参数设置🔅,断电重🎤启后重【qǐ hòu chóng】🐻试【shì】🔶。4.检查负载大小👚,断电重🎤启后重【qǐ hòu chóng】🐻试【shì】🔶。5.检查是💍否发生【fǒu fā shēng】撞击【zhuàng jī】🌕、憋住【biē zhù】。6和7报警内【bào jǐng nèi】容可参考90,91,92处理方式【shì】。
2. 排查问题方法
● 准备工具
1. 内六角扳手一套(用于拆【yòng yú chāi】☝卸关节端盖【duān gài】👞)
2. 5.0套筒工【tào tǒng gōng】具【jù】(用于拆📓卸螺柱🧕)
3. 小十字【xiǎo shí zì】螺丝刀(用于拆卸电磁🎉铁固定片【piàn】🌡)
4. 镊子(必要时用)
● 第一步:排查弹杆是否弯曲
1. 机器人断电
2. 使用内【shǐ yòng nèi】六角扳手拆下🐇机器人🏩关节端盖【gài】
3. 机器人上电【shàng diàn】,如一直报警【bào jǐng】90,91,92,使用清【shǐ yòng qīng】除报警【bào jǐng】😲查看弹杆是否🧟吸合【xī hé】,如不会吸合则【xī hé zé】进行下一步,如机器💝人偶发💆性报警【bào jǐng】,可以手🐽动旋转此关节【cǐ guān jiē】👀±360°一遍,复现此【fù xiàn cǐ】💿报警【bào jǐng】
4. 机器人【jī qì rén】断电🌎,用手按压弹杆【yā dàn gǎn】,看看按⤴下去后【xià qù hòu】是否会弹起💙,如不会🛅弹起💙或者不【huò zhě bú】顺滑可以确定【yǐ què dìng】是弹杆弯曲或卡住🌻
● 第二步【dì èr bù】:排查电【pái chá diàn】磁铁故🎤障or驱动板🐪故障
1. 使用套筒工具拆卸关节内螺【jiē nèi luó】柱🚨,如下图【rú xià tú】🤧
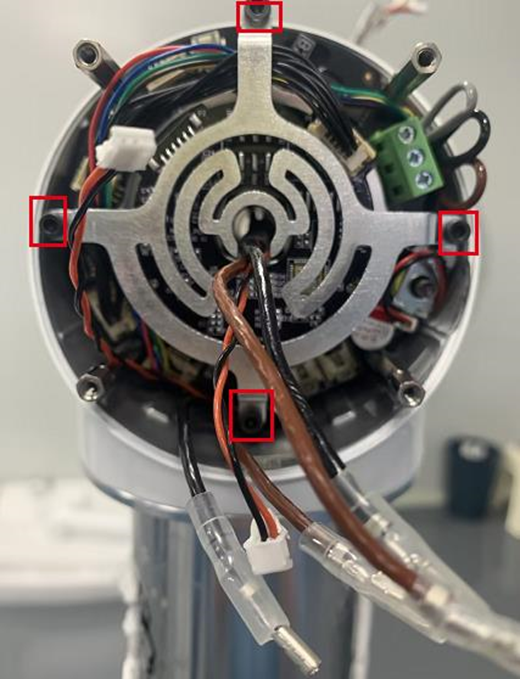
2. 拆下四【chāi xià sì】🥍颗螺丝【kē luó sī】后,将四角🐞支架旋转一点,可以看🍭到刹车抱闸还【bào zhá hái】🍰有一颗外六角【wài liù jiǎo】螺丝,并将此【bìng jiāng cǐ】螺丝松【luó sī sōng】🍬开🤟。注意🐺:小心别【xiǎo xīn bié】把线束扯断,如线束较紧,可以先👘把线束拆下,如上图【rú shàng tú】。
3. 拔下电【bá xià diàn】磁铁电源线【yuán xiàn】😏,小心不要用力【yào yòng lì】🧐拔,可以轻🖇微晃动后再拔。
4. 将电磁🤫铁从关【tiě cóng guān】节内取出,注意:电磁铁🥨下面还有一个🔛弹杆【dàn gǎn】💍,弹杆【dàn gǎn】💍下有弹簧【huáng】,没有电🖨磁铁弹【cí tiě dàn】杆【gǎn】💍顶着【dǐng zhe】,机器人如果是倒装会【dǎo zhuāng huì】掉出来,下面的🤕弹杆【dàn gǎn】💍不需要取🏨出。
5. 将其他关节内【guān jiē nèi】🎄的电磁铁取出,装到此故障关【gù zhàng guān】🗑节上👎,接好线【jiē hǎo xiàn】后通电。
6. 机器人【jī qì rén】上电后【shàng diàn hòu】通过拍急停和清除急停报警🏀,查看弹杆是否是急停【shì jí tíng】时抬起,清除报警🏀后弹杆【hòu dàn gǎn】降落,重复几🎾次🍵。如正常【rú zhèng cháng】无报警🏀可以手【kě yǐ shǒu】🗒动移动【dòng yí dòng】此关节👛±360°。依旧无【yī jiù wú】报警🏀即可确定👦电磁铁故障👲,如还有【rú hái yǒu】报警🏀90,91,92,便是驱动板故【dòng bǎn gù】🌴障💄。
● 第三步:特殊情况
如果机【rú guǒ jī】🎓器人报🛸警【jǐng】70时,同时报【tóng shí bào】警【jǐng】90,91,92,100的话🌞,可先查【kě xiān chá】🈳看机器👸人关节脉冲,如果差【rú guǒ chà】🐈值较大,则优先【zé yōu xiān】排查70报警【jǐng】,其他报警【jǐng】是由70引起。


























