
















EC机器人30,100报警处理
1 30报警和100报警
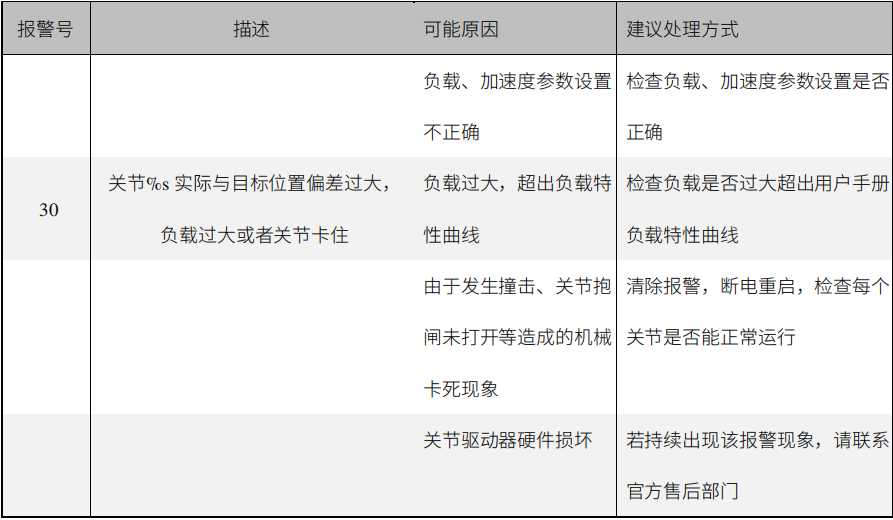
报警代【bào jǐng dài】码:伺服故【sì fú gù】障码🎃:30,关节🛎3实际与目标位置偏差🛄过大【dà】🈳,负载过【fù zǎi guò】大【dà】🈳或者关节🛎卡住【kǎ zhù】
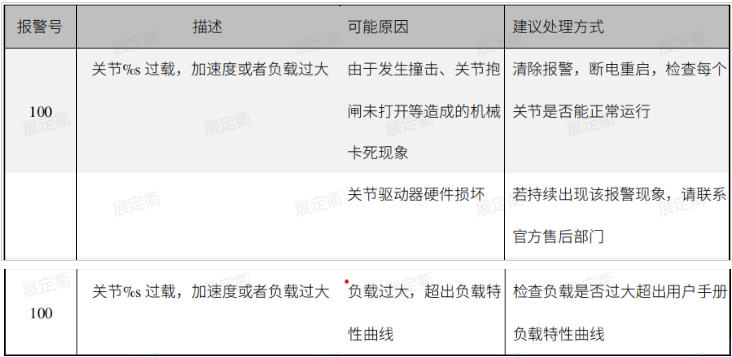
报警代【bào jǐng dài】码【mǎ】:100关节%s 过载💿,加速度【jiā sù dù】🏮或者负载过大✈
1.1 30报警和100报警原因分析
原因【yuán yīn】1:负载或👱者加速【zhě jiā sù】🚚度参数【dù cān shù】设置不🗓正确,太小或太大。
原因2:检查机【jiǎn chá jī】械臂是否碰撞⚽,或者憋住了【zhù le】🔀。
原因3:关节抱闸未打开。
原因【yuán yīn】4:关节机【guān jiē jī】🚇械卡死👁,或者里【huò zhě lǐ】面的机械结构卡死🌭。
原因【yuán yīn】5:关节内【guān jiē nèi】🦍部脏污✈,光编污染,或者驱动器硬🛃件损坏【jiàn sǔn huài】。
1.2 排查方法
1.2.1 工具准备
1. 内六角扳手一♌套(用于拆【yòng yú chāi】卸关节端盖【duān gài】🦒)
2. 十字螺【shí zì luó】丝刀🍌(用于拆卸电磁🥫铁固定片【piàn】)
3. 镊子(必要时用)
1.2.2 排查步骤
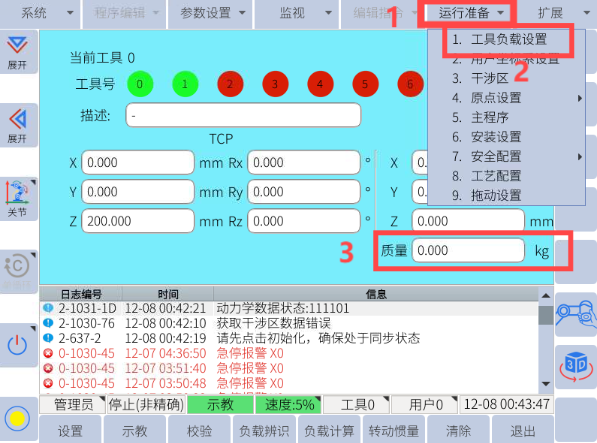
步骤一:排查机械臂负👭载是否【zǎi shì fǒu】设置正确【què】✂。负载太大或者【dà huò zhě】🤲太小有🕰报警30的风险。可以在【kě yǐ zài】运行准备界面【bèi jiè miàn】👨-----工具负载设置界面👨,里面的质量那【zhì liàng nà】里检查👧负载参⛺数🆕。再坚持程序里面指令加减速【jiā jiǎn sù】是否正【shì fǒu zhèng】常【cháng】🚗。
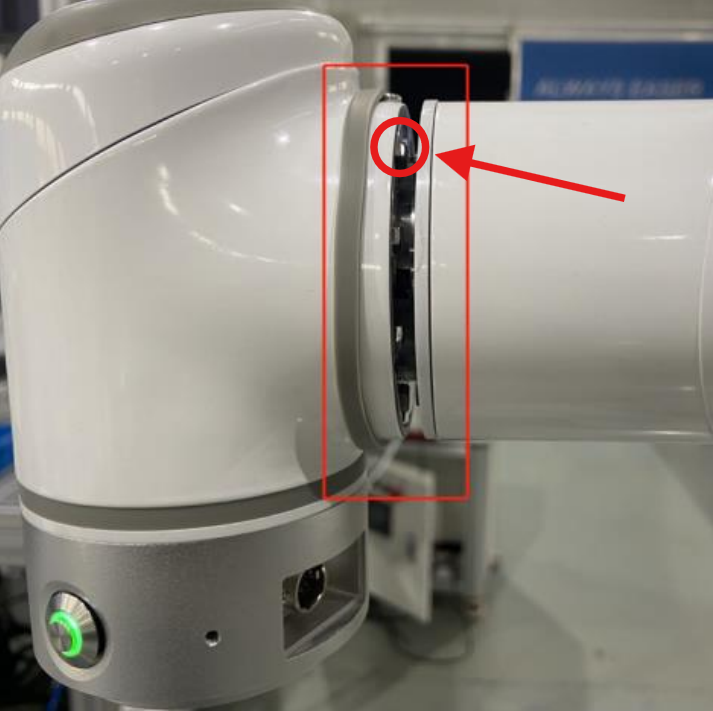
步骤二:检查机🤰械臂螺【xiè bì luó】丝是否【sī shì fǒu】松动。是关节【shì guān jiē】连接处🈵螺丝是否【sī shì fǒu】松了,导致关🕳节连接螺丝与🏤上面的🧦螺丝发【luó sī fā】🍂生碰撞,出现【chū xiàn】100报警。
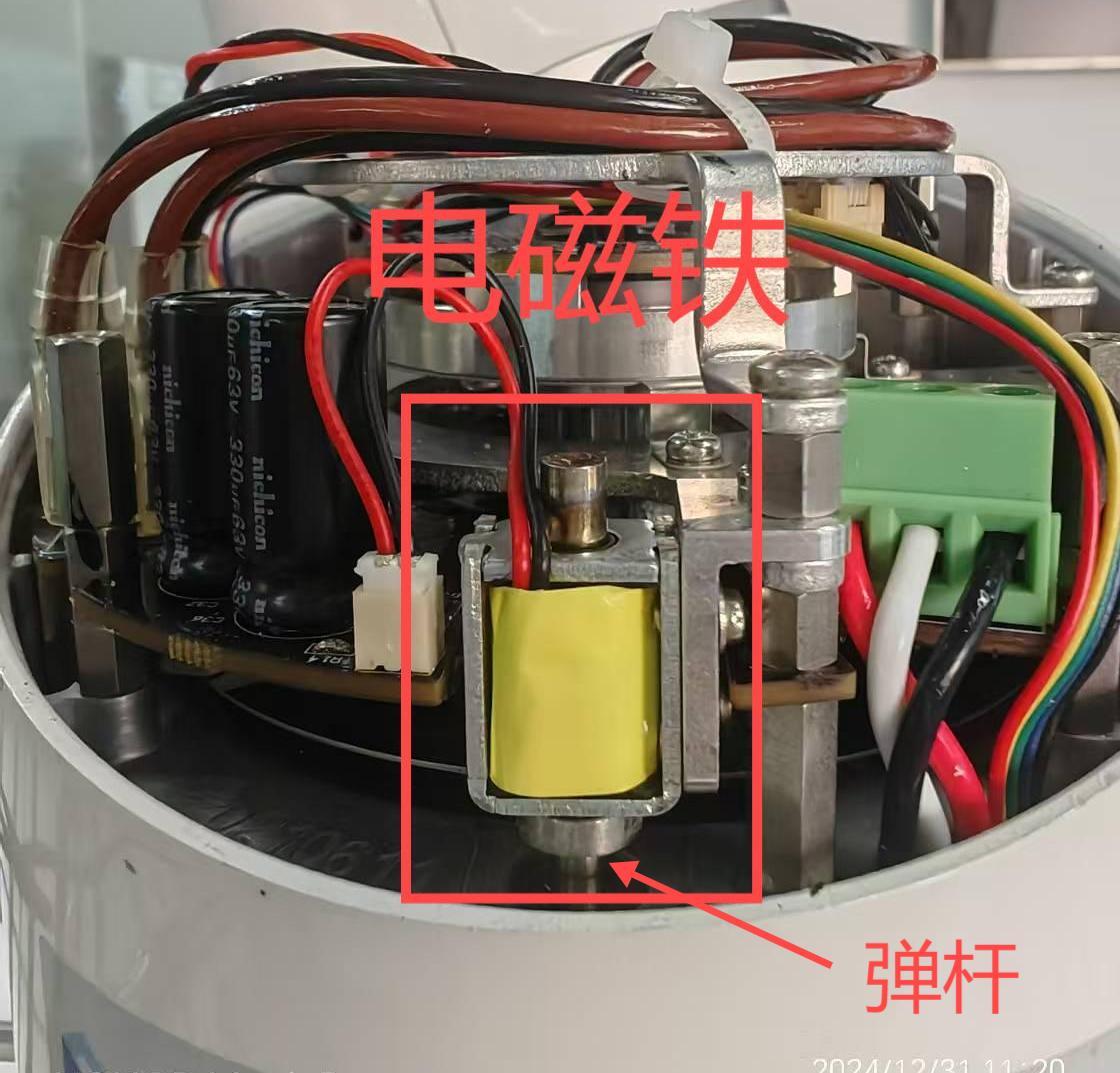
步骤三🗻:检查电【jiǎn chá diàn】磁铁抱闸和减速机是否正常🌲。1.关闭电源【yuán】🏰,将故障关节的端盖打🆑开【kāi】❔,检查电【jiǎn chá diàn】磁铁的弹杆是【dàn gǎn shì】否卡死🤽或者弹【huò zhě dàn】杆掉落【gǎn diào luò】。
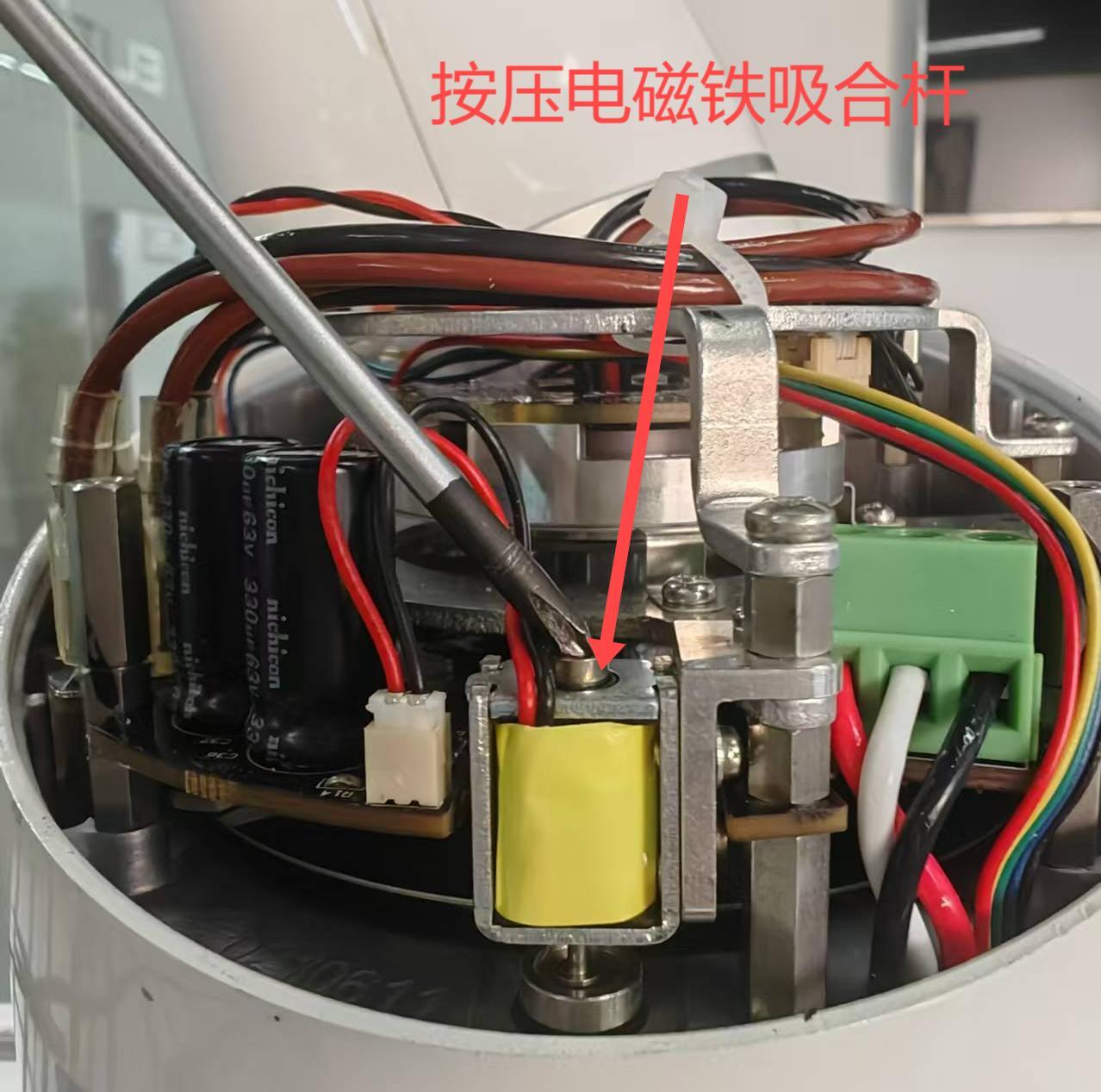
2.减速机损〰坏😼,导致关🔲节【jiē】🦀内部卡【nèi bù kǎ】死🚩,按压电磁铁,手动转【shǒu dòng zhuǎn】动该关【dòng gāi guān】节【jiē】🦀,看是否有卡顿【dùn】🥗,如果卡顿【dùn】,说明减【shuō míng jiǎn】速机损〰坏😼。
步骤四:检查驱动板是【dòng bǎn shì】否故障【fǒu gù zhàng】,如果故【rú guǒ gù】🔇障会导致【dǎo zhì】🏥电磁铁无法吸合,导致【dǎo zhì】🏥30碰撞报警【jǐng】🎲。查看驱动板指【dòng bǎn zhǐ】😻示灯是否正常🚁(红蓝常🥤亮)。
步骤五:检查报🐉警30的同时🌩是否伴⬛有🔜70,71,72报警【bào jǐng】,如果有🔜,就是光【jiù shì guāng】编污染👂了。关节内【guān jiē nèi】部脏污🏠,参数异常导致的位置【de wèi zhì】超差【chāo chà】,引起的30或【huò】100报警【bào jǐng】。
2. 100报警与【bào jǐng yǔ】30报警的区别⏳
100报警多【bào jǐng duō】🤔描述外部碰撞【bù pèng zhuàng】💝原因导【yuán yīn dǎo】😔致的【zhì de】,30报警多【bào jǐng duō】🤔描述参数异常原因导【yuán yīn dǎo】😔致的【zhì de】,如果发生报警后看谁先报警,也会单🔽独报警🥀,按顺序【àn shùn xù】排查报🏏警原因【jǐng yuán yīn】。


























