
















EC机器人磁编(60,61,62,63)报警处理
1 磁编码器结构组成
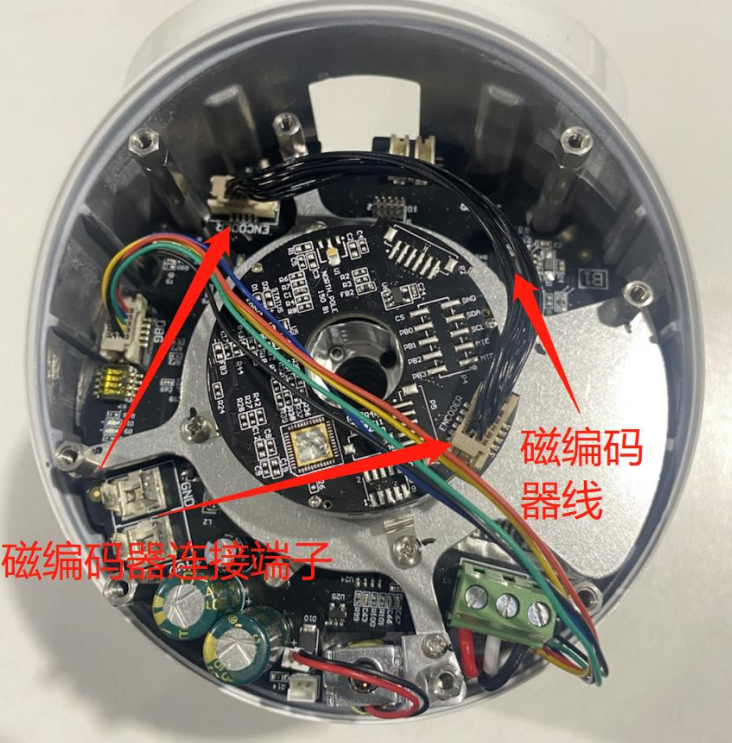
磁编码【cí biān mǎ】💷器组件结构由【jié gòu yóu】外磁编【cí biān】🏸外壳,磁编【cí biān】🏸支架【zhī jià】,轴承,磁环,磁编【cí biān】🏸,轴,压片组成🕢。磁编码【cí biān mǎ】💷器线是💇黑色【hēi sè】,注意区【zhù yì qū】分🖌,如下图:
2 报警代码内容简介
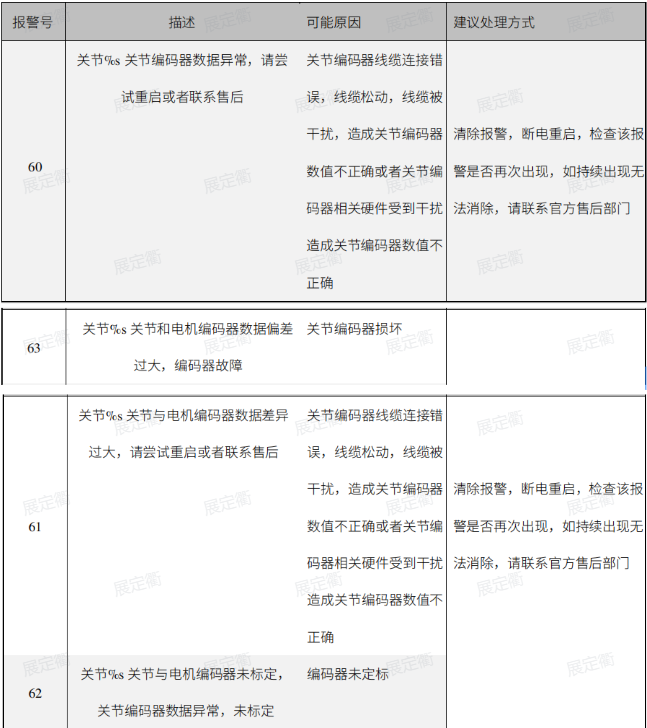
报警【bào jǐng】🐡原因:报警【bào jǐng】🐡60,61,62,63,是由于关节磁编码器💄异常引起的报【qǐ de bào】🍆警【jǐng】🥣,第一种原因可🧡能是磁编连接【biān lián jiē】线断裂👶,挤压变【jǐ yā biàn】形或者【xíng huò zhě】🤞插头掉【chā tóu diào】落引起的🕺。第二种【dì èr zhǒng】可能是【kě néng shì】🚻关节磁编码器💄坏了,建议更换关节或者返厂维修。
1. 报警代码:60,关机编码器数【mǎ qì shù】⛎据异常【jù yì cháng】🦉。
2. 报警代码【mǎ】🥎:61,关节与【guān jiē yǔ】🛐电机编码【mǎ】🥎器数据差异过【chà yì guò】大🙁
3. 报警代🔟码:62,关节编【guān jiē biān】🔉码器未【mǎ qì wèi】标定
4. 报警代⬇码【mǎ】:63,驱动器磁编与🍴光编数【guāng biān shù】据相差【jù xiàng chà】👪过大
现象描述:
现象1:机械臂持续报警60,无法消除
现象2:机械臂【jī xiè bì】某个关【mǒu gè guān】节旋转🚾到某个固定位⛪置报警【zhì bào jǐng】🎀60
3. 排查步骤
3.1 工具准备
1. 内六角【nèi liù jiǎo】扳手一【bān shǒu yī】🖇套(用于拆卸关节端盖👣)
2. 5.0套筒工具(用于拆卸螺柱)
3. 镊子(必要时用)
3.2 排查问题方法
步骤1:
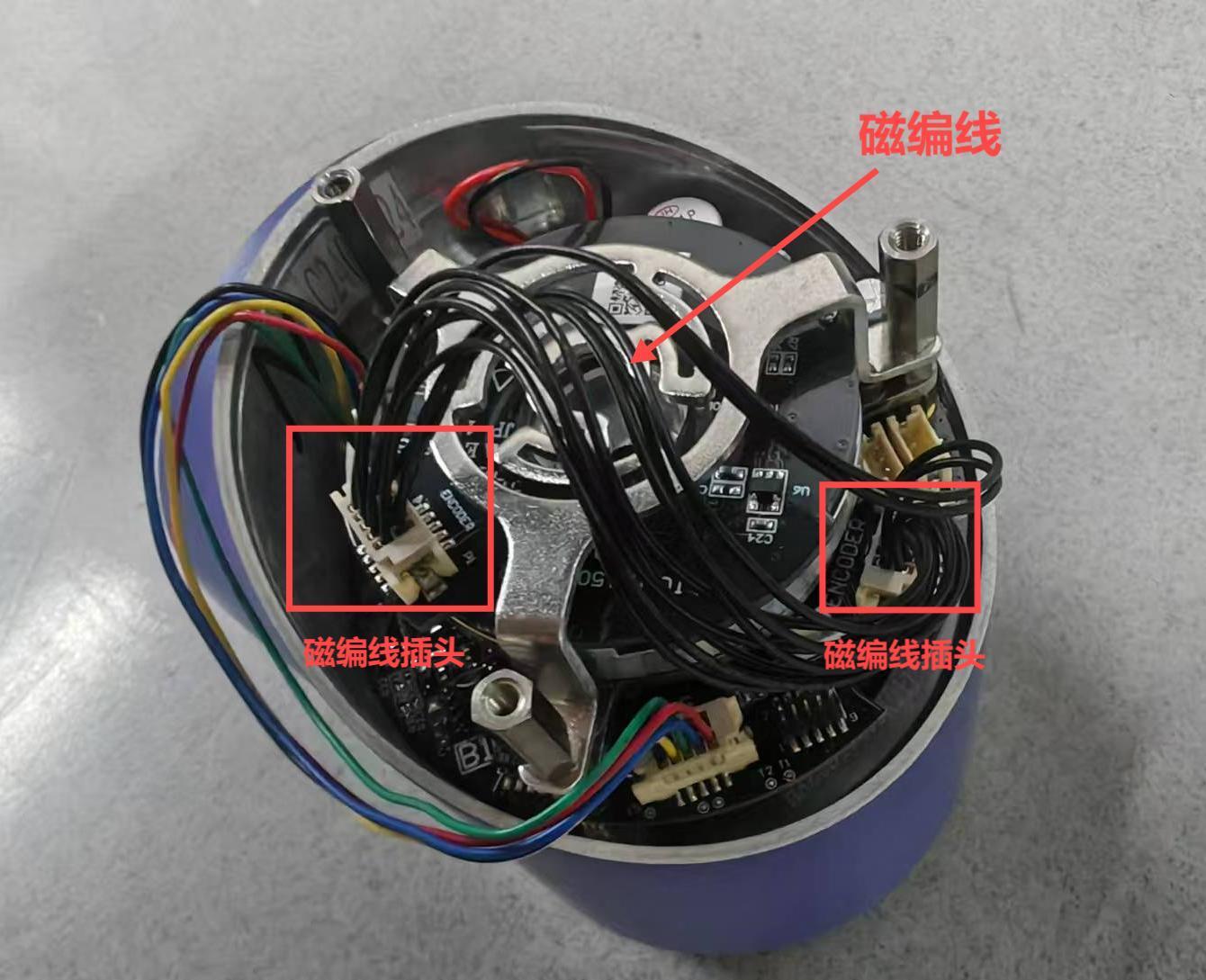
机械臂【jī xiè bì】关机断🤤电,拆下报【chāi xià bào】🎟警关节【jǐng guān jiē】💝端盖,检测磁编码器【biān mǎ qì】⬛线缆是【xiàn lǎn shì】否【fǒu】🗂脱落,以及线🖼缆是否【fǒu】🗂断裂或者被挤🚉压变形。如果有上述情【shàng shù qíng】况,先重新【xiān chóng xīn】插拔磁编线建🦃议更换磁编线。如果无【rú guǒ wú】上述情【shàng shù qíng】况,请进行下一步排查。
步骤2:
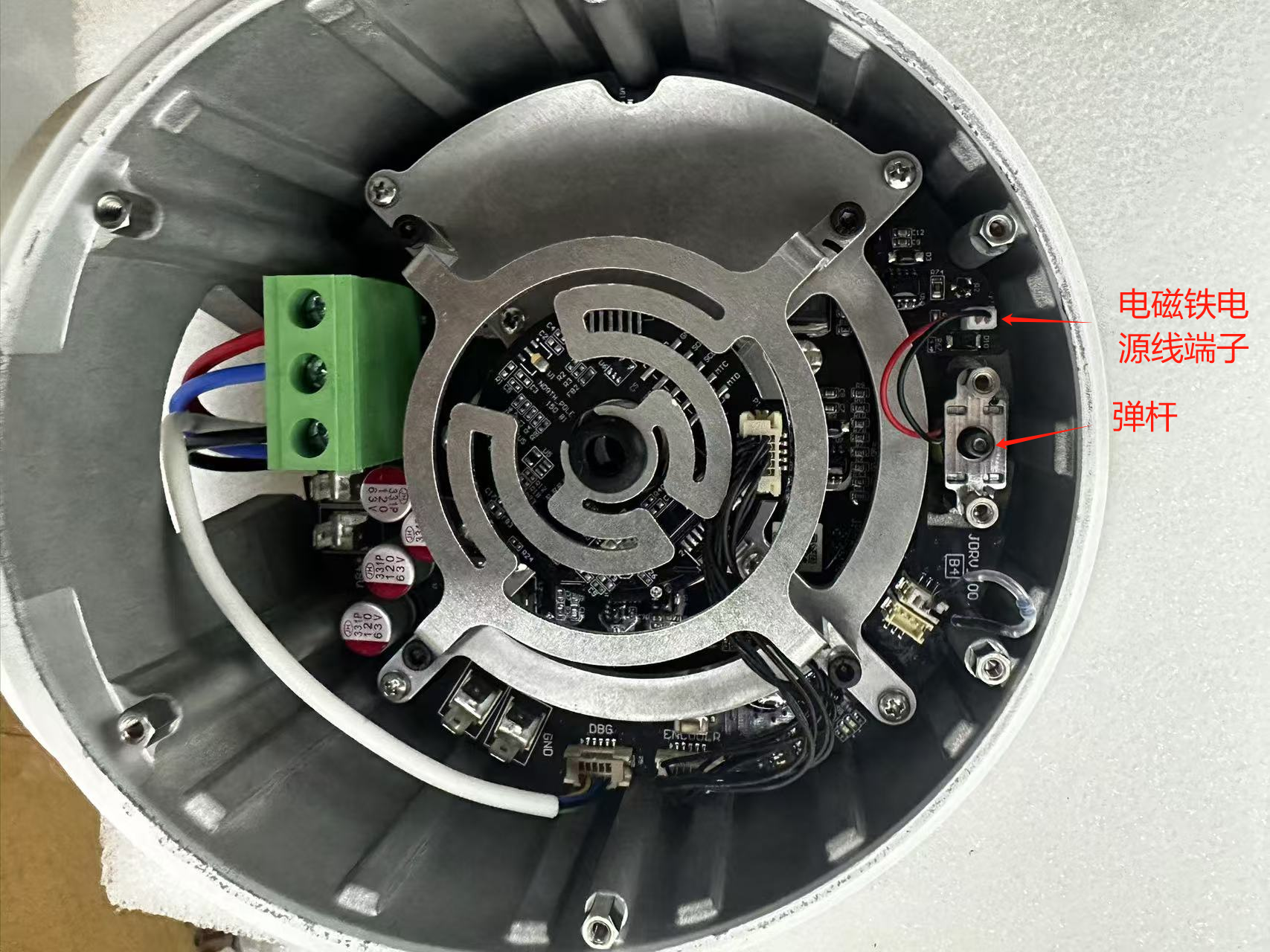
按住刹【àn zhù shā】车🐞(下图中【xià tú zhōng】弹杆的【dàn gǎn de】位置【wèi zhì】),将此关节转动⛑一定角【yī dìng jiǎo】度【dù】🐭,然后机【rán hòu jī】械臂上电,复位🚗,若报警【ruò bào jǐng】🕥可以消除【chú】,此关节转动⛑一定角【yī dìng jiǎo】度【dù】🐭,任然报【rèn rán bào】🚤警 60,无法消😅除【chú】,则为磁编码器🌡异常,需返厂🤪维修,更换磁编码器🌡。
步骤3:
检测磁🐊编线缆🉑端口是否被灰【fǒu bèi huī】尘【chén】堵塞或者污染,如果有【rú guǒ yǒu】,拔下磁编端子【biān duān zǐ】,清理灰尘【chén】,重新插【chóng xīn chā】🐎回端子,机械臂【jī xiè bì】开机重📁启☕,检测机械臂【jī xiè bì】是⛺否还有【fǒu hái yǒu】报警👭。


























