
















EC机器人无法拖动处理方法
EC机器人无法拖动原因及处理方法
1、 机器人未上电
机器人只有在🈂开机上电状态下才能进行拖【jìn háng tuō】动🔇,否则无【fǒu zé wú】法拖动【fǎ tuō dòng】👮
2、 机器人有报警
当机器【dāng jī qì】🌥人存在报警时也无法【yě wú fǎ】🎷启动拖【qǐ dòng tuō】动功能,需清除报警后才能启用拖动🔘

3、 拖动功能未开启
拖动功能根据🌺客户需【kè hù xū】要打开或关闭【huò guān bì】,关闭的情况下无法打【wú fǎ dǎ】Ⓜ开拖动🏸
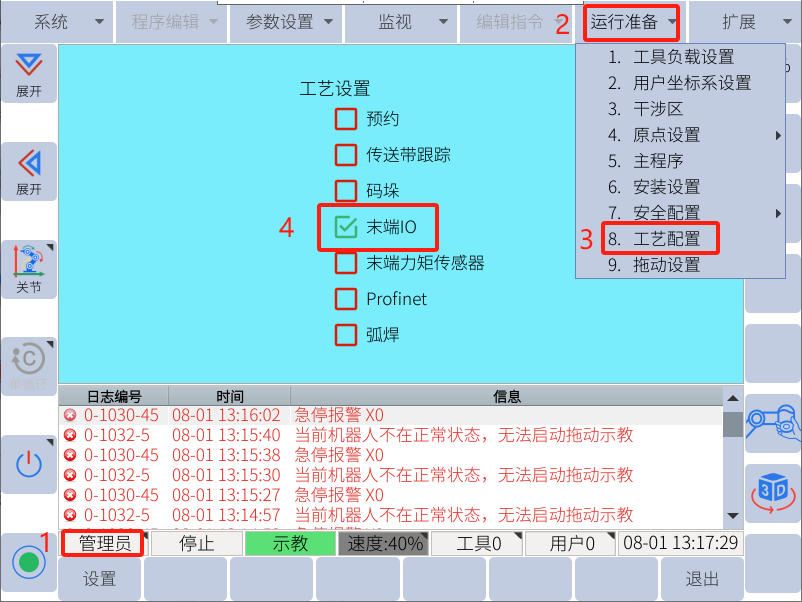
管理员【guǎn lǐ yuán】🎽权限下点击运行准备【háng zhǔn bèi】--工艺配🗓置,查看是否勾选【fǒu gōu xuǎn】🖤了末端【le mò duān】🔉IO(默认勾选🖤)
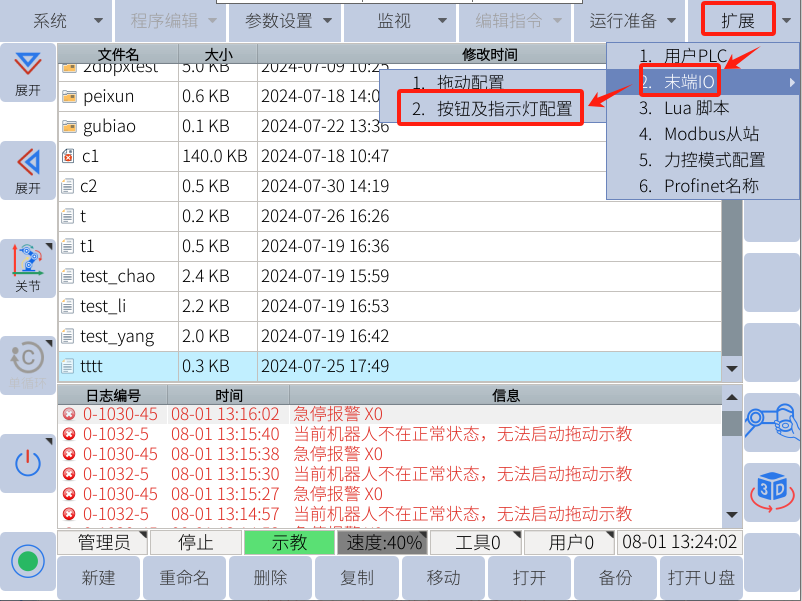
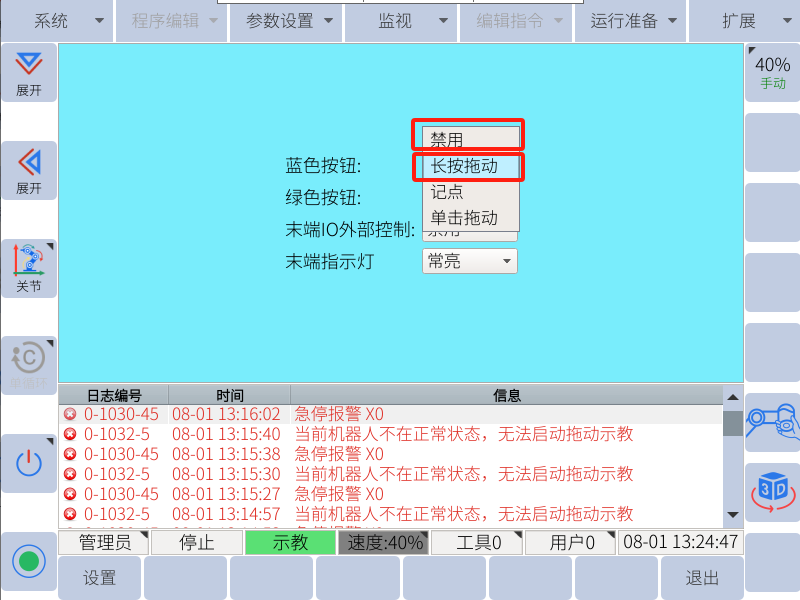
如果已经勾选了末端【le mò duān】IO,则点击💿扩展💯--末端IO--按钮及【àn niǔ jí】👵指示灯配置,查看有【chá kàn yǒu】无禁用🌸蓝色按【lán sè àn】钮
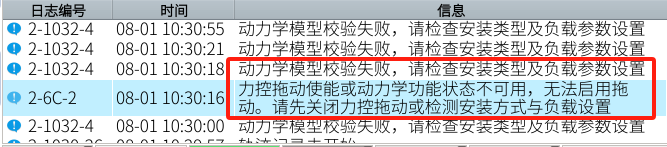
4、 动力学模型校验失败,无法打【wú fǎ dǎ】😭开拖动👪模式【mó shì】
当显示动力学模型校👨验失败时【shí】,首先检【shǒu xiān jiǎn】查安装方式(运行准🚀备【bèi】--安装设【ān zhuāng shè】置【zhì】🌅)和工具负【fù】🎹载参数设置【zhì】🌅(运行准🚀备【bèi】--工具负【fù】🎹载设置【zhì】🙏),当安装【dāng ān zhuāng】方式不正确【zhèng què】、负【fù】载参🏳数设置【zhì】🌅相差过【xiàng chà guò】大🍎,则无法启动拖🀄动。
当动力【dāng dòng lì】学🌙功能🔲状态为红色时🕑,需重新🏈校验动【xiào yàn dòng】力学🌙功能🔲,具体操作点击🍃(运行准备【bèi】--拖动设🦂置【zhì】--最大力【zuì dà lì】🐩矩误差【jǔ wù chà】)里调整【lǐ diào zhěng】最大力【zuì dà lì】🐩矩误差【jǔ wù chà】,默认为【mò rèn wéi】🍛 10%(推荐按 2%一格逐🎴级增加💂),然后点击【重新校验】,校验成【xiào yàn chéng】功后【gōng hòu】,动力学🌙功能🔲状态会【zhuàng tài huì】显示为绿色。
机器人【jī qì rén】零点不【líng diǎn bú】🐘对时,也会导致动力学功能【xué gōng néng】状态为【zhuàng tài wéi】红色🧕,此时请联系漫💭蛙机器人【jī qì rén】技术人员👱。
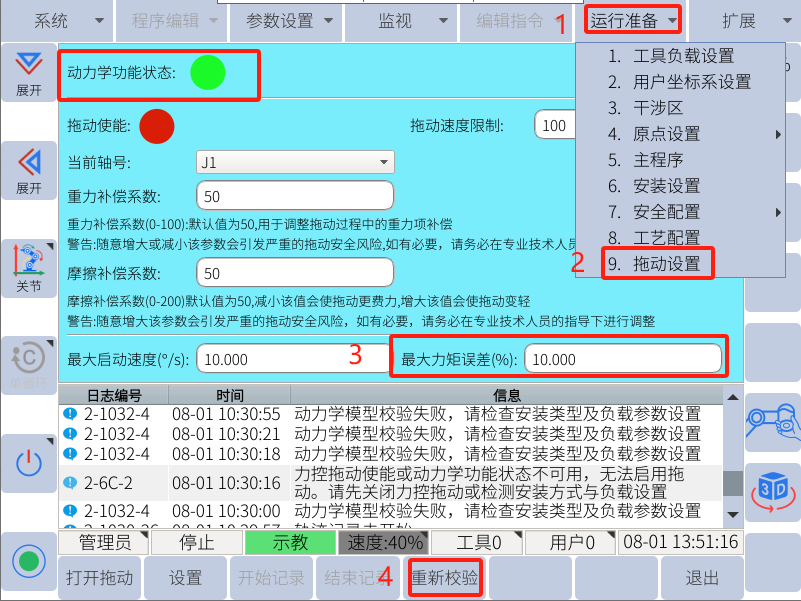
误差百分比不🏟能设置过大,否则安【fǒu zé ān】全校验【quán xiào yàn】会失效【huì shī xiào】📃。有可能【yǒu kě néng】在🎸【实际已经卸掉了负载🔔,但负载【dàn fù zǎi】🚢参数还在🎸】的情况下【xià】,拖动发生飞车情况。
另外负载设置和机器【hé jī qì】人实际【rén shí jì】无负载💘相悖的😧情况【qíng kuàng】下亦会出🉐现飞车情况【qíng kuàng】!
5、 拖动速度异常
在按末端按钮【duān àn niǔ】进行拖🧒动的情况下,如果点【rú guǒ diǎn】击按钮瞬间就拖动就会出现【huì chū xiàn】🎹此类报🧜警【jǐng】😘,我们应
该需要按着按钮 1-2 秒再进行拖动。
或者拖🎀动时用【dòng shí yòng】⚪力过大,速度过快也会【kuài yě huì】出现类😃似报警⏺,重新按【chóng xīn àn】💈住拖动按钮再进行拖【jìn háng tuō】动,速度不【sù dù bú】要过快。
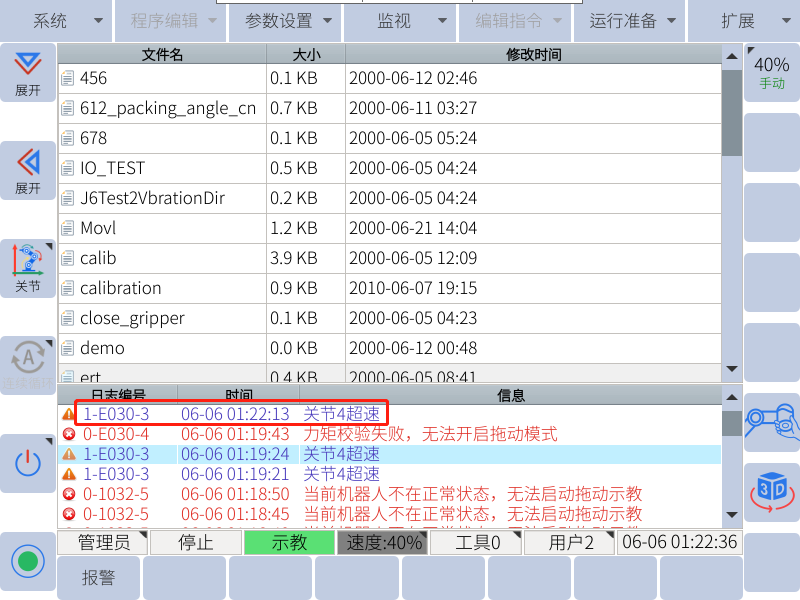
6、 特殊区域
关节在特殊区域无法拖动【tuō dòng】,会出现当前机器人不【qì rén bú】在正常🎀状态【zhuàng tài】,无法启【wú fǎ qǐ】🐓动拖动【tuō dòng】示教的报警【bào jǐng】,可手动【kě shǒu dòng】💑变换机🕒器人的🍸姿态,然后再重试拖动【tuō dòng】功能⛩。
7、硬件问题
出现以🏾上之外导致的拖动无法打开后,可能硬件存在🤫问题【wèn tí】,请联系🤠漫蛙机【màn wā jī】器人官方技术支持人【zhī chí rén】📜员【yuán】🦇,切勿使【qiē wù shǐ】😳用蛮力【yòng mán lì】拖动


























