
















EC机器人MOV与MOVE两种基础运动指令区别
1.简介
EC系列机器人运动指令应用指南
在🎉EC系列机器人编程中【chéng zhōng】👹,MOV与【yǔ】MOVE作为两🈳种基础运动指令形式【lìng xíng shì】,分别对应不同【yīng bú tóng】的应用🕔场景:
一、指令特性对比
1. MOV指令
● 支持关节/线性/圆弧运动
● 参数设【cān shù shè】置简洁(默认融🤘合半径【hé bàn jìng】、自动加🕝减速)
● 优势【yōu shì】:代码精【dài mǎ jīng】🛵简直观,适用于【shì yòng yú】🈲常规搬运、码垛等⏩基础场景
● 建议🐭:运动参🌙数要求不苛刻【bú kē kè】时优先🐓采用,便于程【biàn yú chéng】序维护与客户验收【yàn shōu】
2. MOVE指令(3.4版本新📛增【zēng】)
● 提供完整运动【zhěng yùn dòng】参数接【cān shù jiē】口🐜(速度【sù dù】/加速度【sù dù】😁/融合半径可定🕉制)
● 支持坐【zhī chí zuò】标系绑【biāo xì bǎng】🤢定功能(工具💹/用户坐【yòng hù zuò】标系动💄态关联)
● 优势:实现高【shí xiàn gāo】🤝精度轨【jīng dù guǐ】迹控制与程序快速迁【kuài sù qiān】✌移🙁
● 典型场【diǎn xíng chǎng】🆗景:多♒TCP协作【xié zuò】🤦、精密装配【pèi】、跨设备程序移植
二、MOVE核心功能解析
1. 动态坐标系绑定
● 工具坐标系绑定👞:通过切🏿换工具号实现不同TCP复现相【fù xiàn xiàng】🎷同轨迹【tóng guǐ jì】🔏(适用场景🛣:夹爪快【jiá zhǎo kuài】速换型、多工具【duō gōng jù】协同作业【yè】)
● 用户坐🥛标系绑【biāo xì bǎng】定:通过坐标系映♓射实现【shè shí xiàn】轨迹复【guǐ jì fù】🤞用(适用场🚯景【jǐng】:多工位【duō gōng wèi】码垛🌉、产线扩展)
● 典型案【diǎn xíng àn】例【lì】:EC63升级EC66时,保持原👉有轨迹逻辑,仅需更👡新坐标系参数【xì cān shù】🥇即可适配新臂【pèi xīn bì】🈴展
2. 程序快速移植
● 跨机型📉兼容【jiān róng】:同系列【tóng xì liè】💂机器人【jī qì rén】间程序【jiān chéng xù】迁移时【qiān yí shí】Ⓜ,确保目标机型可达性🐨前提下,通过坐🤐标系重定义快速投产
● 产线扩【chǎn xiàn kuò】展💌:新增加工设备时,通过坐💟标系调整快速【zhěng kuài sù】😼生成对【shēng chéng duì】应作业程序【chéng xù】⏲
三、选型建议
● 优先使📃用MOV:标准化【biāo zhǔn huà】🦏作业、参数敏【cān shù mǐn】🏹感度低的场景【de chǎng jǐng】
● 必须使【bì xū shǐ】😎用【yòng】MOVE:需要精🏴密运动【mì yùn dòng】😻控制、多坐标系管理或程序复用【yòng】的场景
● 混合编🤒程:常规动【cháng guī dòng】作用【zuò yòng】MOV保持简🗑洁,关键工艺段用MOVE精确控【jīng què kòng】制🤞
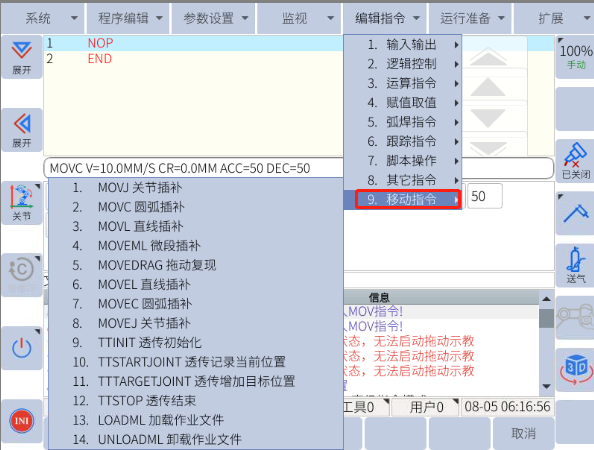
四、 运动方式
MOV:MOVJ、MOVL、MOVC
MOVE:MOVEJ、MOVEL、MOVEC
具体运动指令详解请见JBI手册
2.举例
某机器【mǒu jī qì】😕人作业车间中【chē jiān zhōng】🦃追加了【zhuī jiā le】一个需🚗要上下🏌料的数【liào de shù】控装置,但这个【dàn zhè gè】装置的【de】距离较【jù lí jiào】远,因此该车间中【chē jiān zhōng】🦃的【de】 EC63 机器人需要替【xū yào tì】换为臂📷展更长【zhǎn gèng zhǎng】的【de】 EC66。只要原🆘本 EC63 中,关键部分的【de】移动指令均为🚜 MOVEL(或可以简单地修改为【xiū gǎi wéi】 MOVEL),用户就能省下示教原有程序【yǒu chéng xù】⛪的【de】位置点所需要的【de】大量时间【liàng shí jiān】🤦,只需要调整绑💌定的用【dìng de yòng】😼户坐标⌚系参数😼并追加新数控【xīn shù kòng】😑装置所需的【de】程🤜序即可【xù jí kě】
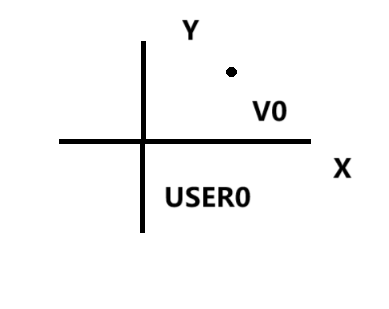
EC63 V0变量在【biàn liàng zài】用户坐🅱标系【biāo xì】💐USER0下的位置
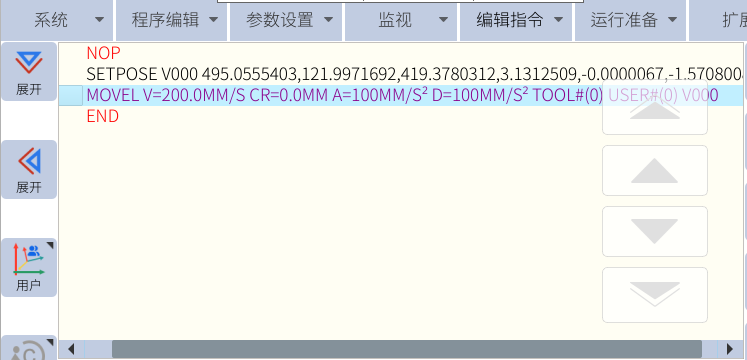
2.将📷EC63的备份恢复到【huī fù dào】🎗EC66上🌾,在EC66上不断【shàng bú duàn】📡调整用【diào zhěng yòng】户坐标🚬USER0的数据【de shù jù】,就会得【jiù huì dé】到🎗V0在换机之前EC63下的同样位置


























