
















CS机器人干涉区插件使用手册
1.简介 :
在多个机械臂互相协🎞同作业时,有共同👝的取料🐳区域【qū yù】🏴/放料区【fàng liào qū】🍷域【yù】🏴,需要一个互锁【gè hù suǒ】信号【xìn hào】/需要给⏰PLC发送信📍号(此信号【xìn hào】无论是【wú lùn shì】否处于自动运行模式【háng mó shì】都可以【dōu kě yǐ】🚻自动输出信号【xìn hào】)
2.操作流程
(1):安装安【ān zhuāng ān】全区插【quán qū chā】件【jiàn】🎡(参考插件【jiàn】🎡安装手册✍)
(2):如图😿2-1 点击【diǎn jī】 配置【pèi zhì】🌽(1)-干涉区【gàn shè qū】🥗(2)-点击立【diǎn jī lì】方体图标🐓(3)新建一个立方体干涉区【gàn shè qū】🥗

图2-1
如图2-2 设置立👿方体的【fāng tǐ de】两个顶尖对角:设置顶【shè zhì dǐng】点👆1 设置顶【shè zhì dǐng】点👆2

图2-2
(3):如图2-3 设置机【shè zhì jī】械臂进入干涉区绑定【dìng】的💥DO信号(寄存器🍓插件的💥DO信号也【xìn hào yě】可以绑👏定【dìng】 需要改【xū yào gǎi】名字下Ⓜ拉栏才【lā lán cái】💹会显示)
当机械臂检测进入干涉区会📎自动输【zì dòng shū】出【chū】🥙,输出【shū chū】🥙IO内填写的DO信号🍫
启用【qǐ yòng】🏮IO:通过设【tōng guò shè】置对应🗣DI 进行开【jìn háng kāi】启或关🥕闭干涉区
启用模式:1开机时启用
2运行时启用
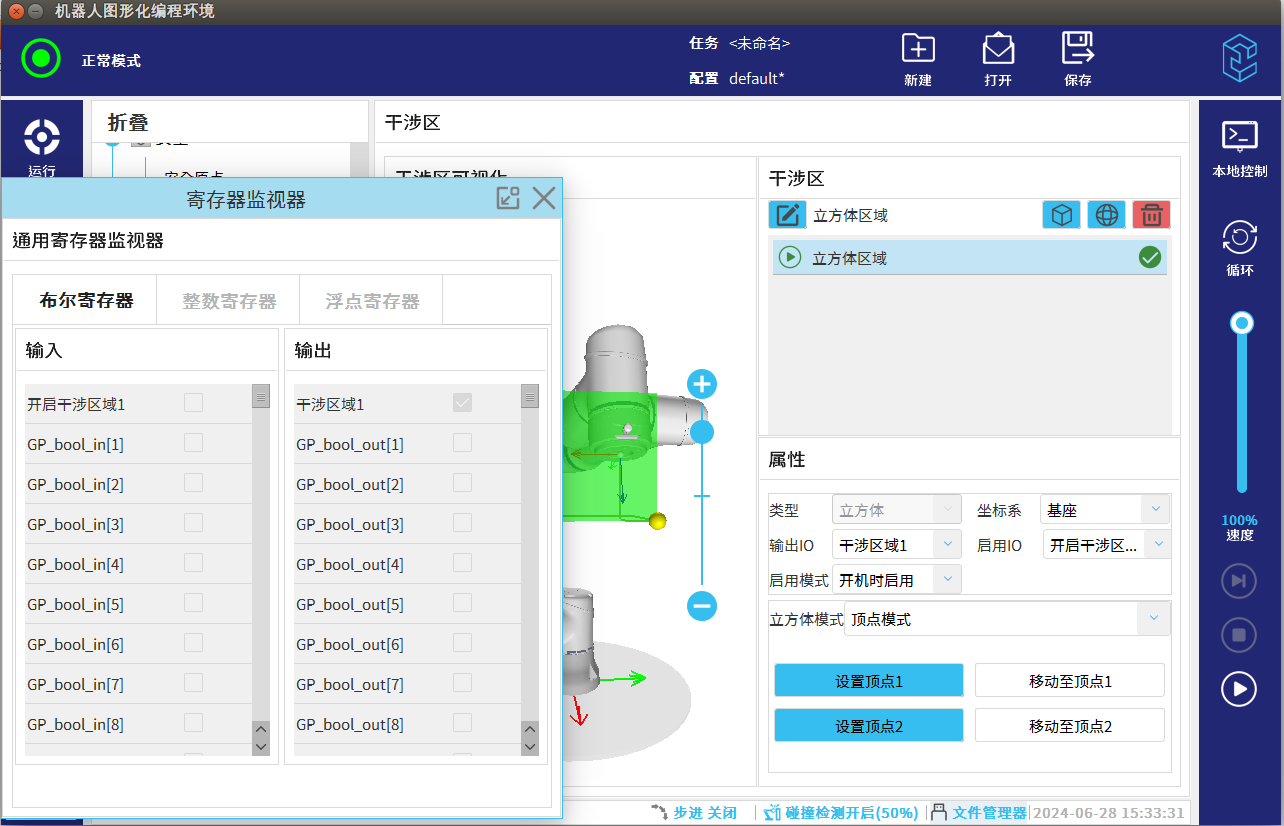
图2-3
(4)立方体视频演示:
video(26).mp4
(5)球形干涉区设置:
如图🔳2-4 配置-干涉区【qū】🕵-添加球【tiān jiā qiú】形干涉区【qū】🕵 -绑定【bǎng dìng】DIDO-示教球心【xīn】-设置球🤽半径🍳

图2-4
(6)球形干涉区视频演示:
video(27).mp4
3.常见问题解答
(1):干涉区可以建立多个
(2):开机时启用:无论程序是否💓处于自动任务🕸 只要进【zhī yào jìn】入到干【rù dào gàn】✈涉区都会自动🙄触发绑【chù fā bǎng】定信号【dìng xìn hào】
运行时启用:干涉区程序运行时生效


























