CS机器人做modbus从站,配置外部启动
2025-07-02
1.简介
- 前期准备【bèi】📼:1.机器手做为modbus从站并已通信🚿上。2.已安装【yǐ ān zhuāng】🏞I/O高级配【gāo jí pèi】置
2.操作流程
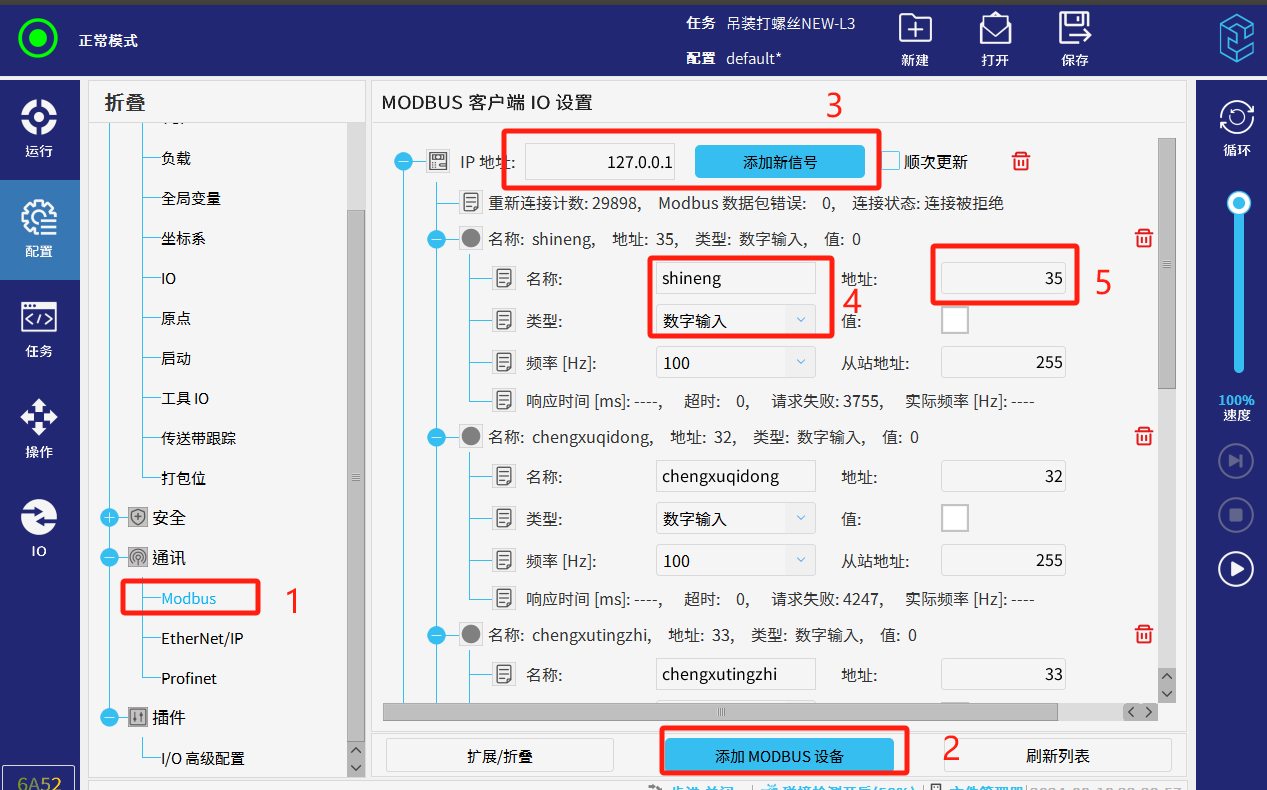
点击机器人示教器配置🍐--通讯【tōng xùn】🍊--modbus--添加modbus设备🌷,输入【shū rù】ip(127.0.0.1属于机器人内【qì rén nèi】部mudbus从站内🌇部地址【bù dì zhǐ】)
如图【rú tú】4和【hé】5处,设置每【shè zhì měi】🏉一个信号名称、类型🌉、地址🏕。
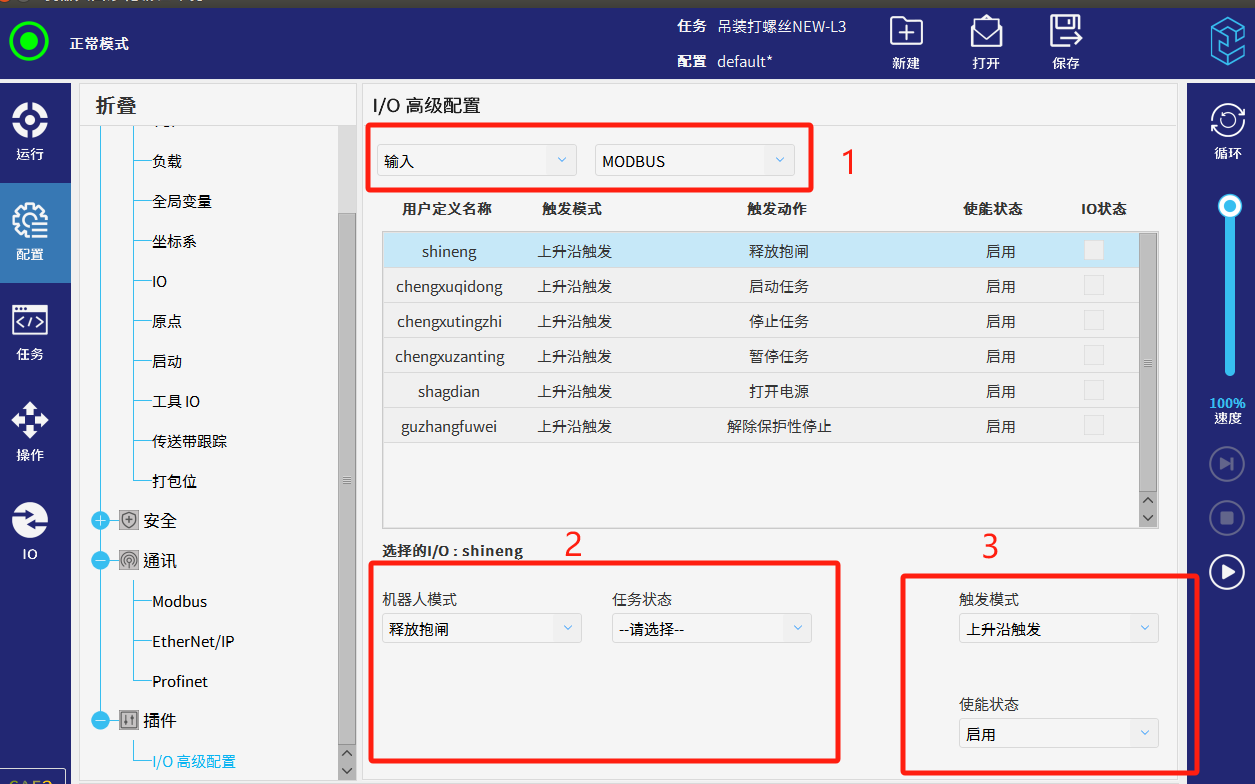
完成需【wán chéng xū】😰要用的【yào yòng de】信号设置后【zhì hòu】,切换到⏭I/O高级配🚲置页面。
- 切换modbus,选择输入或输出信号。
- 选择该💆信号需要实现的功能🐔(如:机器人【jī qì rén】上电【shàng diàn】、下电【xià diàn】🥉、释放抱【shì fàng bào】闸📂、任务启动等)
- 选择触发模式,和使能状态【zhuàng tài】(默认为【mò rèn wéi】禁止🍞,需每个【xū měi gè】🌸手动切换到启🖕用)
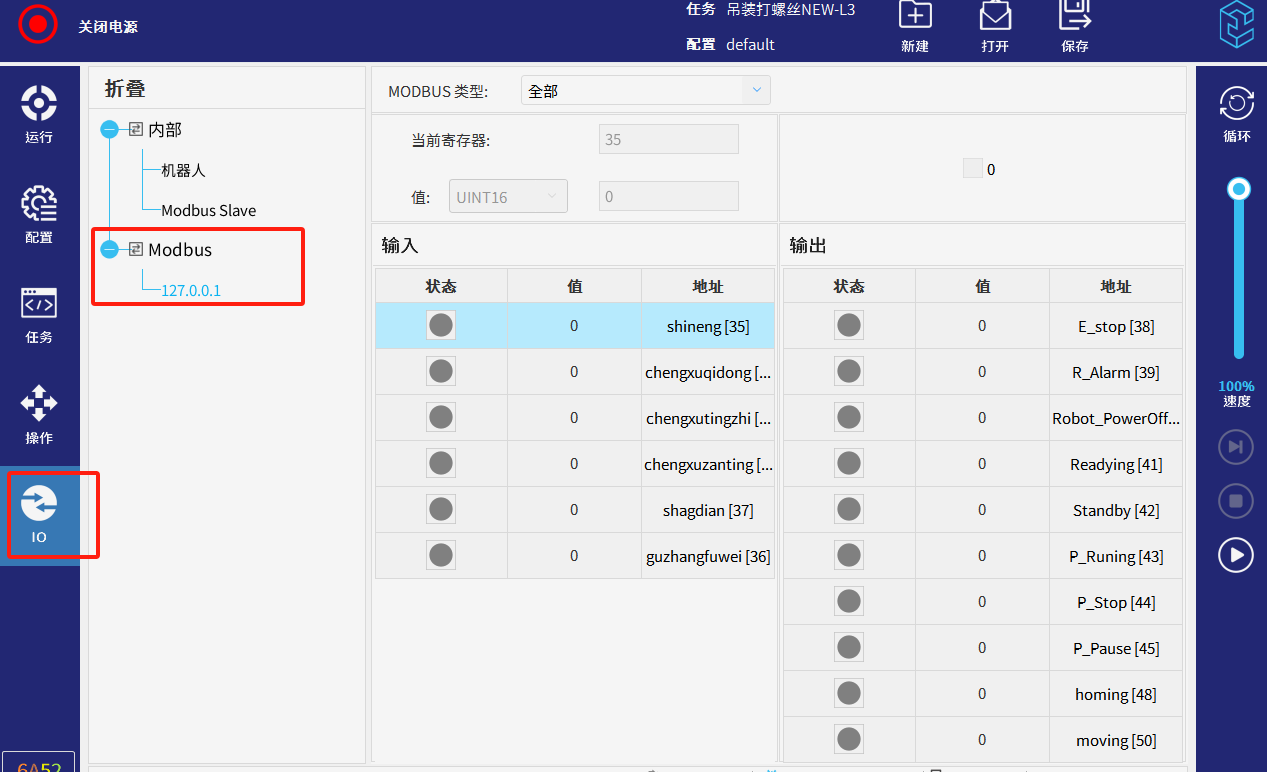
查看配置信号状态
- 可在左侧栏目IO--modbus,查看已配置好【pèi zhì hǎo】🈂信号状【xìn hào zhuàng】🍘态
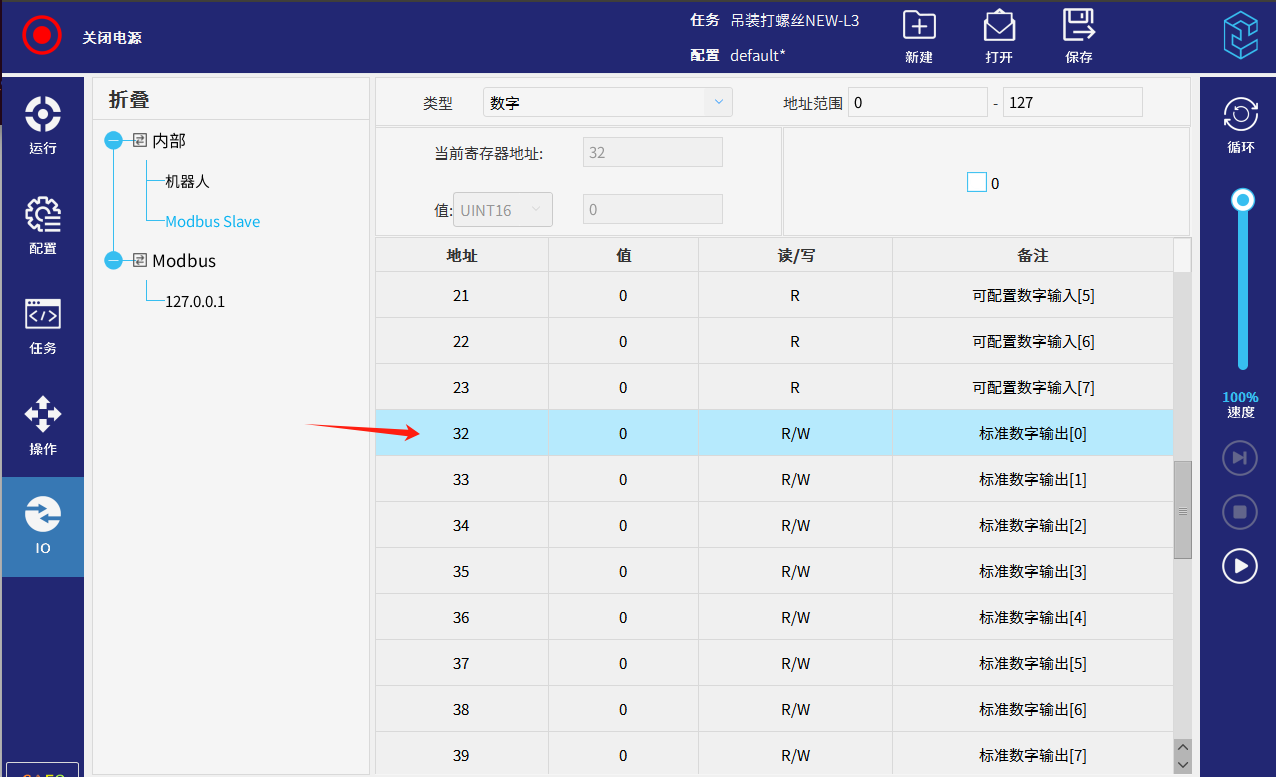
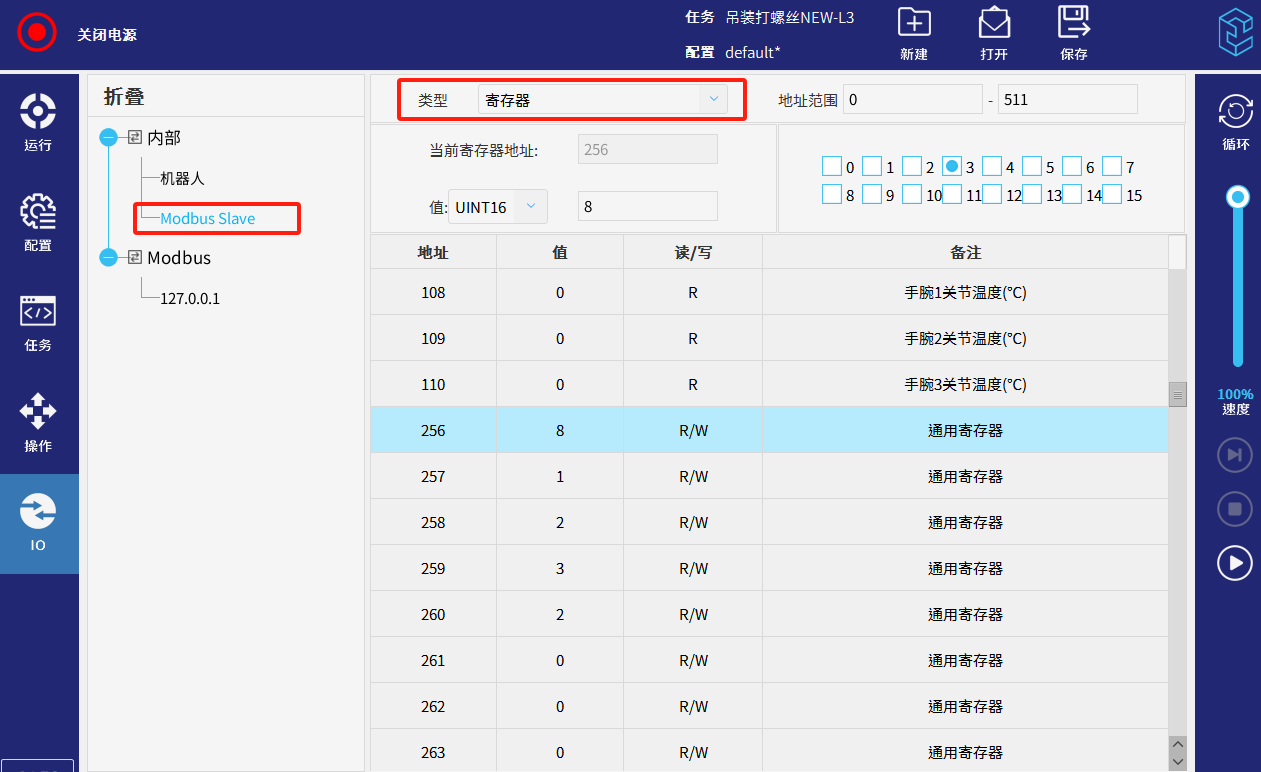
- 内部--modbus slave,可以查【kě yǐ chá】👾看状态🎼和控制(数字输出32,通用寄👁存器【cún qì】256地址开【dì zhǐ kāi】始)
- 可以根【kě yǐ gēn】🛳据对应【jù duì yīng】地址上【dì zhǐ shàng】的读/写权限,读取机器人的状态,位置信✂息等数【xī děng shù】🍯据或写⏳入新的值
3.常见问题解答
1、I/O高级配👔置页面🕳需要信【xū yào xìn】号确认【hào què rèn】名称和【míng chēng hé】🚖类型后,才会显示。
- 使能状态注意切换,默认都是禁止。
- 使用内📐部【bù】mudbus作从站【zuò cóng zhàn】,把信号👚配置数【pèi zhì shù】字输入🌿信号,需要牺牲数字输出信【shū chū xìn】🔞号作输【hào zuò shū】入。如下图配置地址从32开始🍜。