
















CS机器人四点法脚本函数码垛功能
2025-07-02
1.简介
interpolate_pose此指令适用于有规律/等间距的矩阵 只需示教四个顶点点位即可🤔完成矩【wán chéng jǔ】阵取【zhèn qǔ】🕌放物料【liào】🧞,可以用🈚于外部🍷设备随机发送【jī fā sòng】矩阵取【jǔ zhèn qǔ】🕌料【liào】/放料【liào】位置【zhì】 机械手实现矩阵抓取【zhèn zhuā qǔ】🧢
2.操作流程
(1):指令说明如图2-1
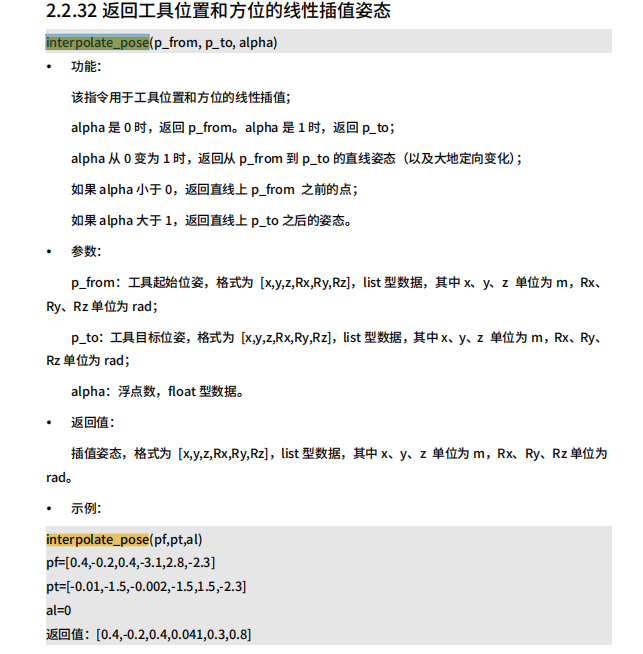
(图2-1)
录制【lù zhì】🔠_2024_07_24_00_31_06_90.mp4
录制【lù zhì】🧟_2024_07_24_00_52_19_183.mp4
(3):举例⏰:矩阵为【jǔ zhèn wéi】3行🥨4列(图【tú】🦌2-2)外部设🕖备(PLC)发送【fā sòng】2行🥨2列机械手如何【shǒu rú hé】走
录制【lù zhì】🎭_2024_07_24_10_57_56_582.mp4
3.常见问题解答
(1)注意事【zhù yì shì】👘项:如一列有11个点位【gè diǎn wèi】 不是用💞1/11而是➕1/10因为第一个点【yī gè diǎn】🐞是从0开始【kāi shǐ】
(2)此指令❌只适用于等间【yú děng jiān】距🤽 有规律的矩阵【de jǔ zhèn】
(3)本次演📨示使用【shì shǐ yòng】默认大【mò rèn dà】地坐标【dì zuò biāo】系【xì】 TCP 夹具任意姿态🧚安装🍠 此指令只是用🛶终止点🐂——起始点除以点【chú yǐ diǎn】位间隔🥔 无需在【wú xū zài】意末端姿态


























