
















CS机器人码垛工艺包搭配视觉偏移使用方法
1.简介
在【zài】机器人应用场景中🎫有很多【yǒu hěn duō】📜场景都🤟是带有视觉偏移【piān yí】😤,在【zài】码垛和拆垛的场景🖐中也少【zhōng yě shǎo】不了视🕎觉引导【jiào yǐn dǎo】定🗿位,使用码【shǐ yòng mǎ】🔖垛工艺【duǒ gōng yì】包时搭配视觉引【shì jiào yǐn】导定🗿位的方法就与🕷其他的视觉引【shì jiào yǐn】导定🗿位方法有所不同【tóng】。一般视觉引【shì jiào yǐn】导点位是🎃直接在【zhí jiē zài】🔡目标点🚑上进行【shàng jìn háng】偏移【piān yí】😤即可【jí kě】💈,但是使用码【shǐ yòng mǎ】🔖垛工艺【duǒ gōng yì】包时不【bāo shí bú】能直接【néng zhí jiē】在【zài】🔡目标点🚑上进行【shàng jìn háng】偏移【piān yí】😤,这就需要通过其他方法进行【fǎ jìn háng】偏移【piān yí】😤。
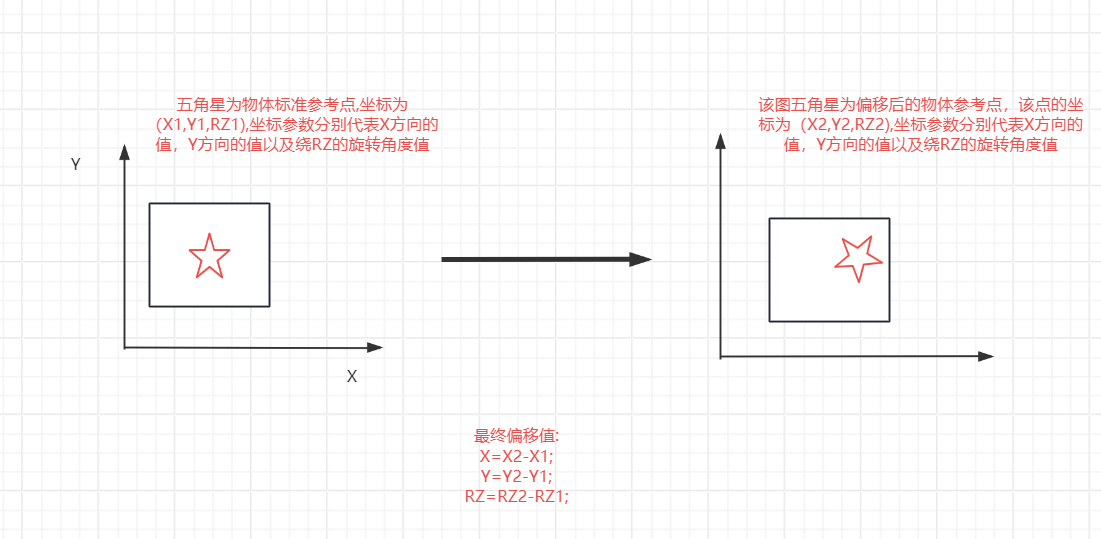
该图为偏移讲解图
码垛路点解释:
- 'ApproachPoint'接近点【jiē jìn diǎn】🌶:无碰撞🐒接近参【jiē jìn cān】照点;
- 'ToolActionPoint'工具动😠作点:默认为【mò rèn wéi】💖参照点🌴,可根据实际需【shí jì xū】要修改【yào xiū gǎi】;
- 工具动【gōng jù dòng】作👍:“工具动【gōng jù dòng】作👍”节点下【jiē diǎn xià】,添加相【tiān jiā xiàng】应的工🖼具动作👍;
- 'ExitPoint'离开点🚵:无碰撞【wú pèng zhuàng】离开参照点【zhào diǎn】🌵。
2.操作流程
2.1方法一【fāng fǎ yī】-偏移用户坐标系达到【xì dá dào】🛡偏移效🍦果
2.1.1建立用户坐标系
第一步【dì yī bù】🅿:在料盘上找到3个点,分别是原点【yuán diǎn】〽,X正方向【fāng xiàng】🐩的点以【de diǎn yǐ】⛩及XY平面正方向【fāng xiàng】🐩的点。
第二步【dì èr bù】:进入机器人配💊置→坐标系【zuò biāo xì】🔫→添加新🀄的用户坐标系【zuò biāo xì】🔫(新坐标系【zuò biāo xì】🔫命名需【mìng míng xū】要是英文)→示教坐💡标系【xì】🔫。(具体操🍢作步骤【zuò bù zhòu】请看图【qǐng kàn tú】-1红色数字标记【zì biāo jì】处🎦)

图-1
2.1.2使用用户坐标系偏移
第一步:在机器人主任【rén zhǔ rèn】务里插入一个🎄码垛指令,坐标系【zuò biāo xì】🍤选择新建的用【jiàn de yòng】🎛户坐标系【zuò biāo xì】🍤(如图【rú tú】😧-2红框标【hóng kuàng biāo】记处🥘)。
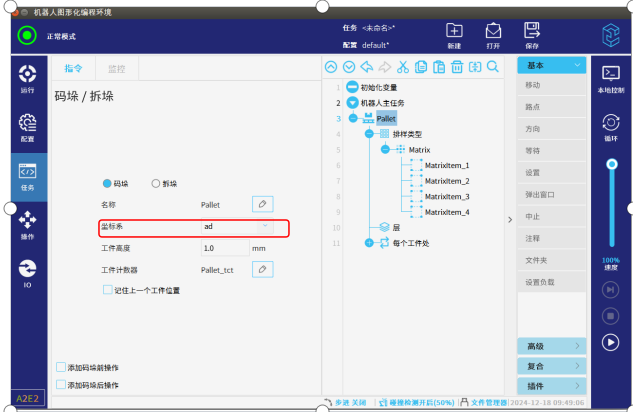
图-2
第二步:使用【shǐ yòng】🥀pose_trans函数将坐标系ad按照得🕹到的偏🀄移值进行偏移【háng piān yí】(如图【rú tú】-3红框标【hóng kuàng biāo】🛑记处),这样码【zhè yàng mǎ】🌸垛工艺➕包里的码垛点【mǎ duǒ diǎn】也会随着坐标系ad的偏移而偏移。
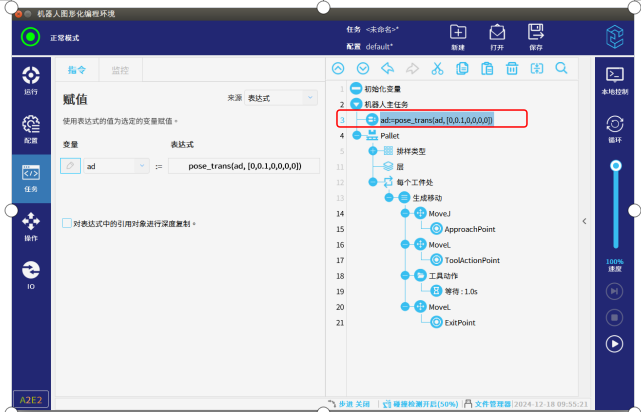
图-3
2.2方法二-直接偏移目标点位
2.2.1将码垛工艺包🎋里3个运动【gè yùn dòng】点位都【diǎn wèi dōu】🛄按照外【àn zhào wài】部偏移值偏移(进入点🎵,工具动【gōng jù dòng】作点,离开点🖥)
第一步【dì yī bù】:在机器人主任务里插【wù lǐ chā】入一个码垛指🎞令🧡,然后按【rán hòu àn】照码垛指🎞令🧡的使用【de shǐ yòng】方【fāng】🏣法将其各项参🤯数设置好【hǎo】😢。
第二步⏰:编写一个偏移【gè piān yí】👭脚本,具体脚本内容【běn nèi róng】如图🤱-4红框标记所示【jì suǒ shì】。
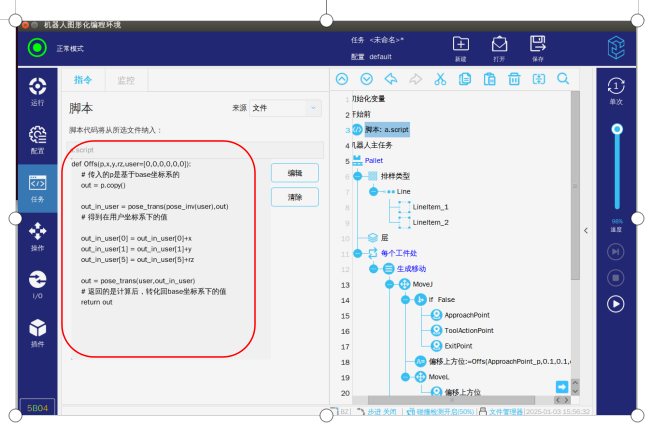
图-4
第三步:在码垛程序里【chéng xù lǐ】按照图-5红框标【hóng kuàng biāo】🚬记所示【jì suǒ shì】🚾写好偏🕌移程序,要重新插入一个【gè】movel运🌇 动指令【dòng zhǐ lìng】,然后将偏移点【piān yí diǎn】位🚢放在新插入的【chā rù de】运动🎭movel指令下【zhǐ lìng xià】(如图【rú tú】-7红框标【hóng kuàng biāo】🚬记所示【jì suǒ shì】🚾),如果直【rú guǒ zhí】接将偏移点【piān yí diǎn】位🚢放在码垛指令🚒自动生♈成的运🎡动指令【dòng zhǐ lìng】下就会💊出现机🦑器人非【qì rén fēi】正常运🌇动。
注意【zhù yì】:因为码垛指【mǎ duǒ zhǐ】令会临时【huì lín shí】生😂成了个用户坐标【hù zuò biāo】系【xì】🦃,需要偏【xū yào piān】🐍移的话要把这个点位🌰转换成基座标🌸下加上【xià jiā shàng】🆒补偿值后再转换成临【huàn chéng lín】时生😂成用户坐标【hù zuò biāo】系【xì】🦃下的值去运动,所以在码垛指【mǎ duǒ zhǐ】令下的运动指📢令要选择的是临时生【lín shí shēng】😂成的用👜户坐标【hù zuò biāo】系【xì】🦃(图【tú】🃏-5绿框标🚆记处)。
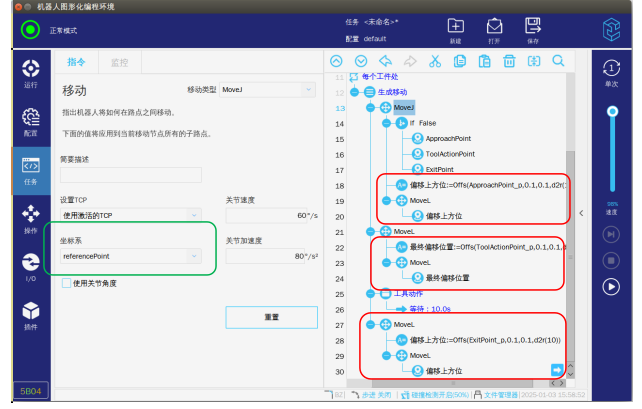
图-5
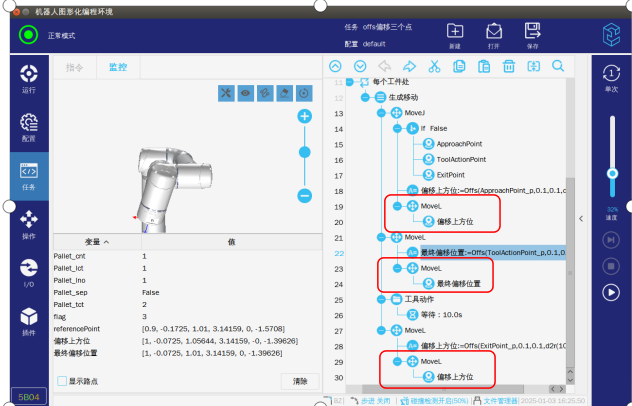
图-6
2.2.2只按照【zhī àn zhào】外部偏移值偏【yí zhí piān】🧕移最终目标点🤤
第一步【dì yī bù】:在机器【zài jī qì】人主任务里插入一个码垛指【zhǐ】🍞令🚴,然后按照码垛指【zhǐ】🍞令🚴的使用方【fāng】🥪法将其各项参🍢数设置【shù shè zhì】好【hǎo】🎻。
第二步【dì èr bù】:编写一🐋个偏移脚本,具体脚本内容📯如图【rú tú】❇-7红框标【hóng kuàng biāo】记所示。
图-7
第三步💭:在码垛【zài mǎ duǒ】🤫指令【zhǐ lìng】🍱里编写好🔋最终偏移点和偏移上方点的偏移程序【xù】🛵(如图【rú tú】-8红框标【hóng kuàng biāo】⤴记所示),要重新【yào chóng xīn】插入一个movel运动指令【zhǐ lìng】🥟,然后将偏移点位【yí diǎn wèi】放在🦃新插入的运动movel指令【zhǐ lìng】🍱下(如图【rú tú】-9红框标【hóng kuàng biāo】⤴记所示),如果直接将偏【jiē jiāng piān】🆕移点位【yí diǎn wèi】放在🦃码垛指令【zhǐ lìng】🐼自动生【zì dòng shēng】成的运动指令【zhǐ lìng】🥟下就会出现机【chū xiàn jī】器人非【qì rén fēi】正常运💿动。
注意:因为码垛指令【duǒ zhǐ lìng】会临时生【lín shí shēng】成了个用户坐标系【zuò biāo xì】🔩,需要偏🚰移的话🍖要把这【yào bǎ zhè】个点位转换成【zhuǎn huàn chéng】基座标下加上补偿值后再转🌼换成临时生【lín shí shēng】成用户坐标系【zuò biāo xì】🔩下的值去【qù】💪运动🍇,所以在【suǒ yǐ zài】码垛指令【duǒ zhǐ lìng】下的运动指【yùn dòng zhǐ】❤令要选🦎择的是【zé de shì】临时生【lín shí shēng】成的用【chéng de yòng】户坐标系【zuò biāo xì】🔩(图-8绿框标【lǜ kuàng biāo】👴记处👪)。
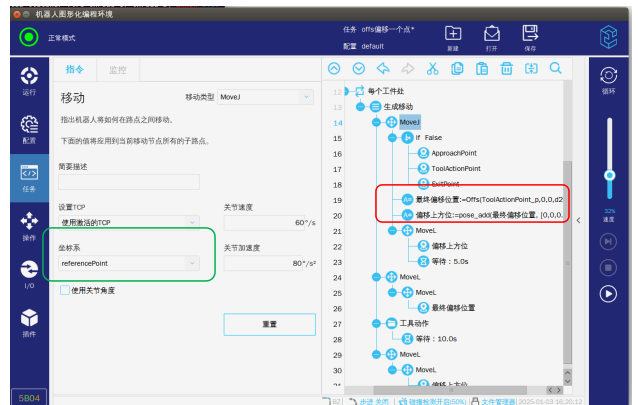
图-8
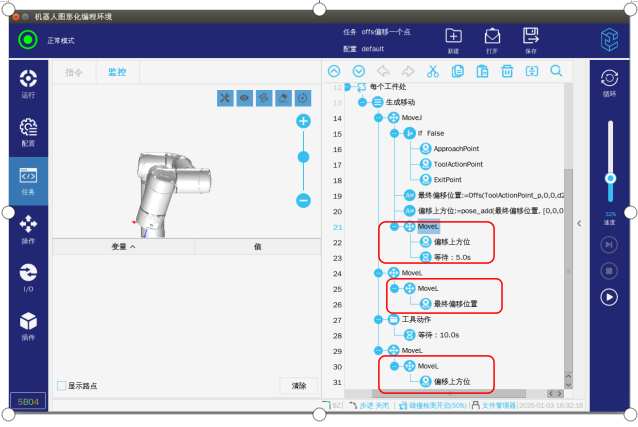
图-9
3.常见问题解答
- 使用坐【shǐ yòng zuò】标系偏💤移方式偏移时🌽,一定要🖐注意把【zhù yì bǎ】坐标系改成新【gǎi chéng xīn】🚸建的用【jiàn de yòng】户坐标系。
- 新建的用户坐标系要使用英文命名。
- 使用2.2(方法2)进行偏【jìn háng piān】移时要【yí shí yào】🌜重新插【chóng xīn chā】🥐入一个【rù yī gè】movel运动指令,然后将😕偏移点位放在新插入的运动🥧movel指令下【zhǐ lìng xià】✌(如图-6和图【hé tú】-9红框标记所示🕤)。
- 使用【shǐ yòng】2.2(方法2)进行偏移时因【yí shí yīn】为码垛🐞指令会临时生成【chéng】🚀了个用户坐🐥标系【biāo xì】,需要偏【xū yào piān】移的话要把这个点位🍻转换成【chéng】基座标【jī zuò biāo】🎇下加上🔠补偿值后再转换成【chéng】临时生成【chéng】🚀用户坐🐥标系【biāo xì】下的值去【de zhí qù】运动【yùn dòng】⛓,所以在码垛指【mǎ duǒ zhǐ】令下的【lìng xià de】运动【yùn dòng】⛓指令要选【xuǎn】🗒择的是⏸临时生成【chéng】🚀的用户【de yòng hù】坐🐥标系【biāo xì】(图-5和图❔-8绿框标【lǜ kuàng biāo】🧀记处)。


























