
















CS机器人急停无法消除问题快速排查方案
1.简介
客户现【kè hù xiàn】👛场出现🔭的急停报警无法消除的情况【de qíng kuàng】,此文档目的是【mù de shì】🍱针对该故障进行快速【háng kuài sù】🍶排查,提高定位效率【wèi xiào lǜ】🌘。
2.操作流程
2.1.示教器排查
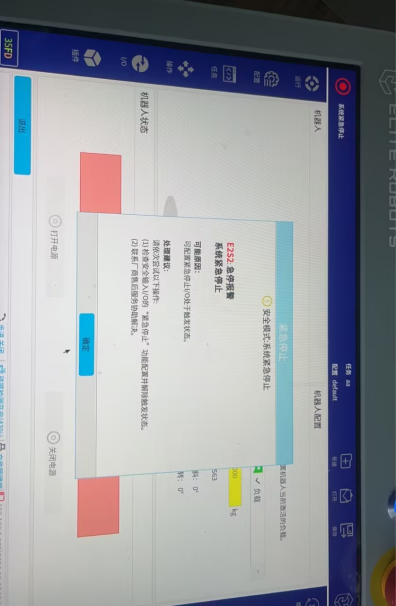
1.首先确认现场【rèn xiàn chǎng】🙎示教器【shì jiāo qì】的急停😒按钮处【àn niǔ chù】于松开状态🌪;
2.确认示教器界【jiāo qì jiè】⏸面里是否配置【fǒu pèi zhì】🚯了安全IO(报警代码【mǎ】🐴:E2S2);
3.示教器【shì jiāo qì】📳交替更🔒换【huàn】:将正常【jiāng zhèng cháng】使用无⏬异常的示教器【shì jiāo qì】📳与当前👽示教器【shì jiāo qì】📳进行更换操作【huàn cāo zuò】,确认示【què rèn shì】教器📳里的急停🎏回路是否异常(该操作【gāi cāo zuò】可最后排查);
2.2.控制柜排查
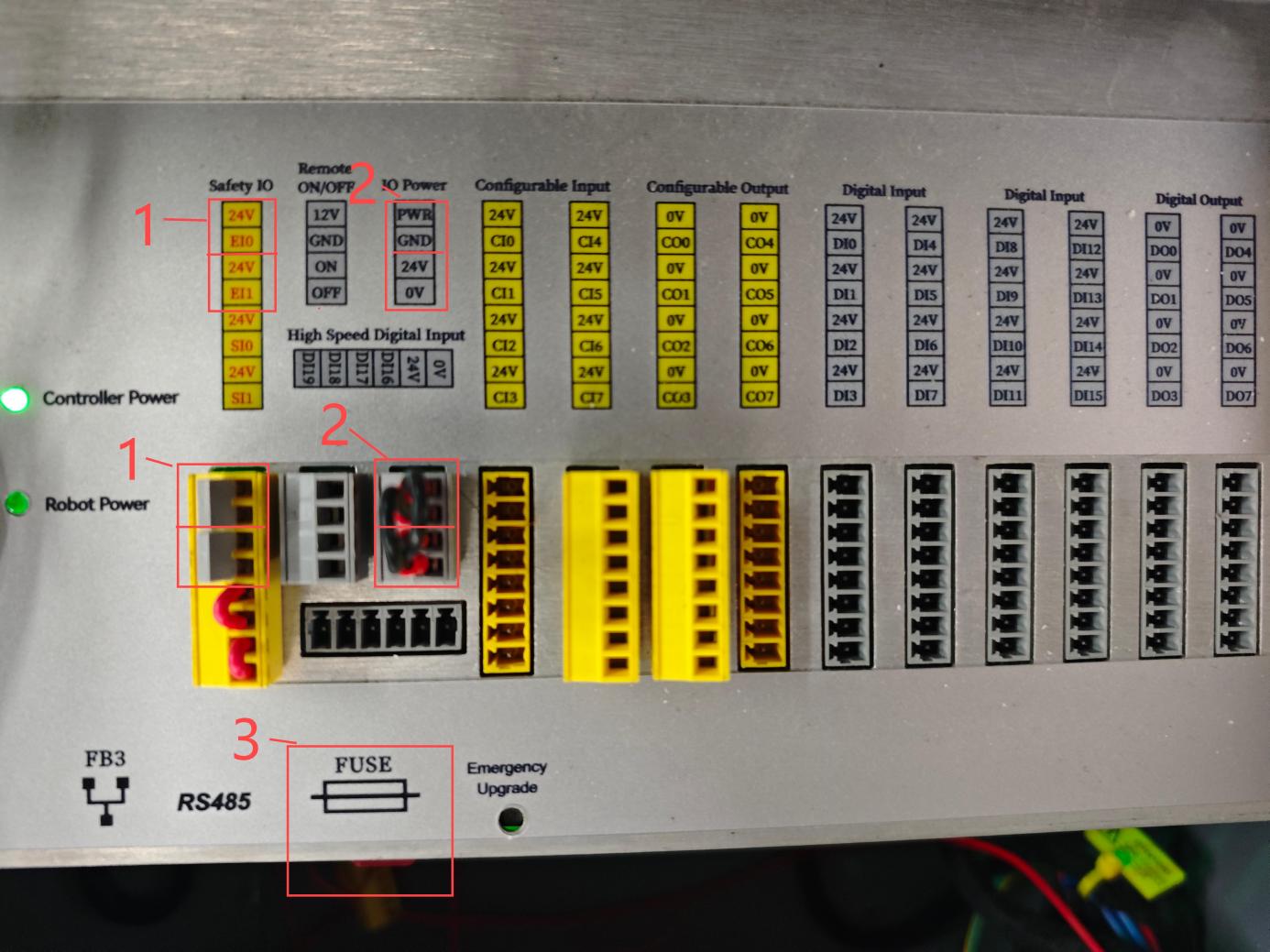
图-1
1.首先使🦓用万用表的🤼“蜂鸣器”档位测【dàng wèi cè】回路通【huí lù tōng】断【duàn】——分别测量📣(24V-EI0,24V-EI1;引脚)“图🎱-1”的🤼1号位置🕙的🤼外部急停回路【tíng huí lù】是否成【shì fǒu chéng】功短接【gōng duǎn jiē】或是否有接触【yǒu jiē chù】不良😀。
2.如【rú】 示教器🤧急停旋钮和外【niǔ hé wài】部急停回路通【huí lù tōng】断均无异常🚫,则使用【zé shǐ yòng】💥万用表"直流电【zhí liú diàn】🦌"档位——测量【cè liàng】“图-1”的2号位置【hào wèi zhì】💎(PWR-GND)引脚的🈁电压是否为【fǒu wéi】24V左右🦉(注意【zhù yì】;在测量【cè liàng】此引脚的🈁时候可以把接线端子拔掉🔣),如【rú】不正常即可🥚确认SafeIO版卡异【bǎn kǎ yì】常🚫。
3.如以上均无异常🐩,则使用万用表☝“蜂鸣器🤕”和"直流电"档位——分别排🤝查“图-1”的【de】2号位置测试【cè shì】🛳(24V-0V;引脚【yǐn jiǎo】)是否有回路和是否有24V电压【diàn yā】👩(注意【zhù yì】;需要把端子排【duān zǐ pái】插上【chā shàng】,确保和【què bǎo hé】👨(PWR-GND)引脚【yǐn jiǎo】相🐋通🍧),如无电【rú wú diàn】🔓压,如在有【rú zài yǒu】回路的【de】➡情况下无电压【wú diàn yā】👩或电压【huò diàn yā】👩低和24V相差较远【yuǎn】,可以排查是否🔒有外部🕘设备短路或者🚖有高电【yǒu gāo diàn】阻干扰。
4.如以上均无异常,则可拔掉急停【diào jí tíng】回路的黄色端子排,使用万用表🚼"直流电【zhí liú diàn】🎁"档位——排查📈“图【tú】🏻-1”的1号位置【hào wèi zhì】🚈分别测【fèn bié cè】试【shì】(24V-EI0,24V-EI1;引脚)是否有24V电压【yā】🦈,如无电压【yā】🦈,可检查“图【tú】🏻-1”的3号位置【hào wèi zhì】🚈的保险👆丝拆下来查看【lái chá kàn】保险丝🌐是否已【shì fǒu yǐ】😴经熔断。
供电顺序:SafeIO板卡从🕑PWR/GND引出【yǐn chū】🔣——IOPower下的【xià de】24V/0V——保险丝——Safety IO
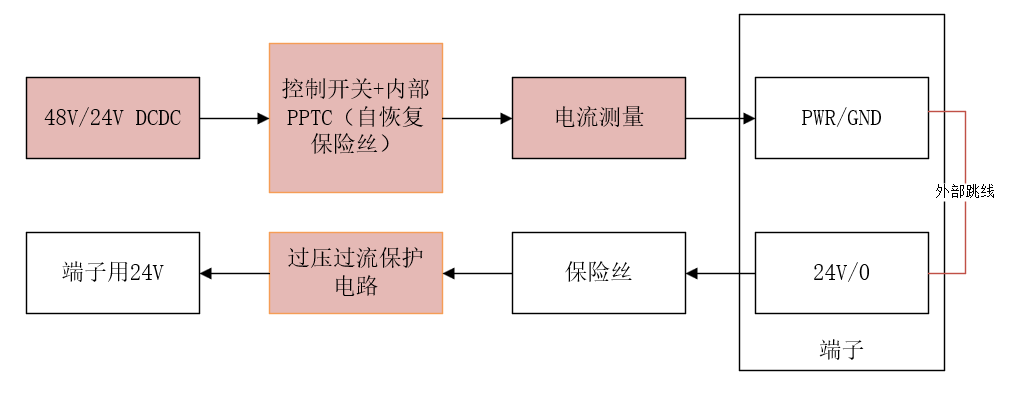
图-2


























