
















CS机器人进入恢复模式的处理方法
1. 简介
本文简【běn wén jiǎn】💤单介绍🏉CS机器人👐在进入【zài jìn rù】恢复模式【shì】时该☕如何操作【zuò】,有两种情况会【qíng kuàng huì】进入到🖤恢复模式【shì】中,一种是【yī zhǒng shì】🔡机器人👐在运行过程中📂速度过快关节【kuài guān jiē】超过了【chāo guò le】极限位【jí xiàn wèi】✂置进入🚙恢复模式【shì】,一种是【yī zhǒng shì】🔡在配置了安全【le ān quán】平🏈面时机【miàn shí jī】器人👐末端TCP超过了【chāo guò le】安全平🏈面
2. 操作流程
2.1在运行中关节进入恢复模式
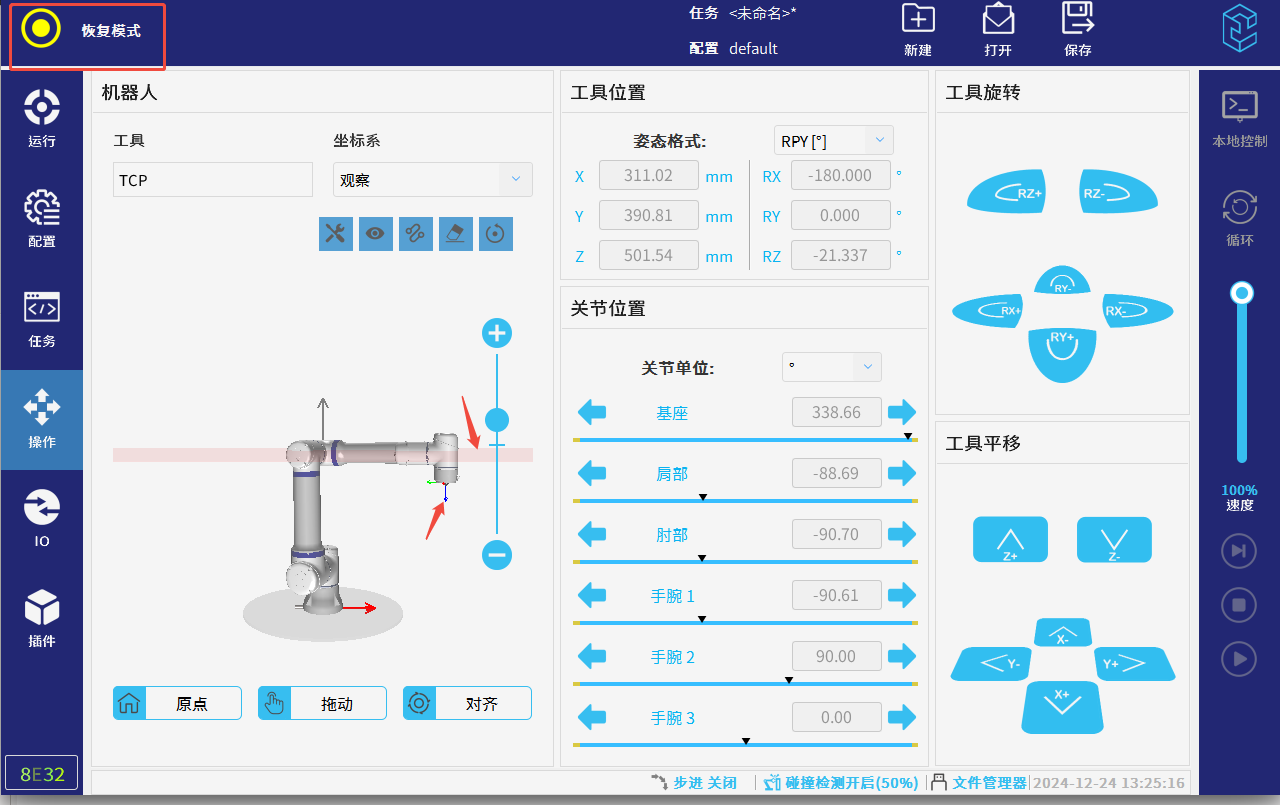
在运行中机器人速度过快超过关节极限
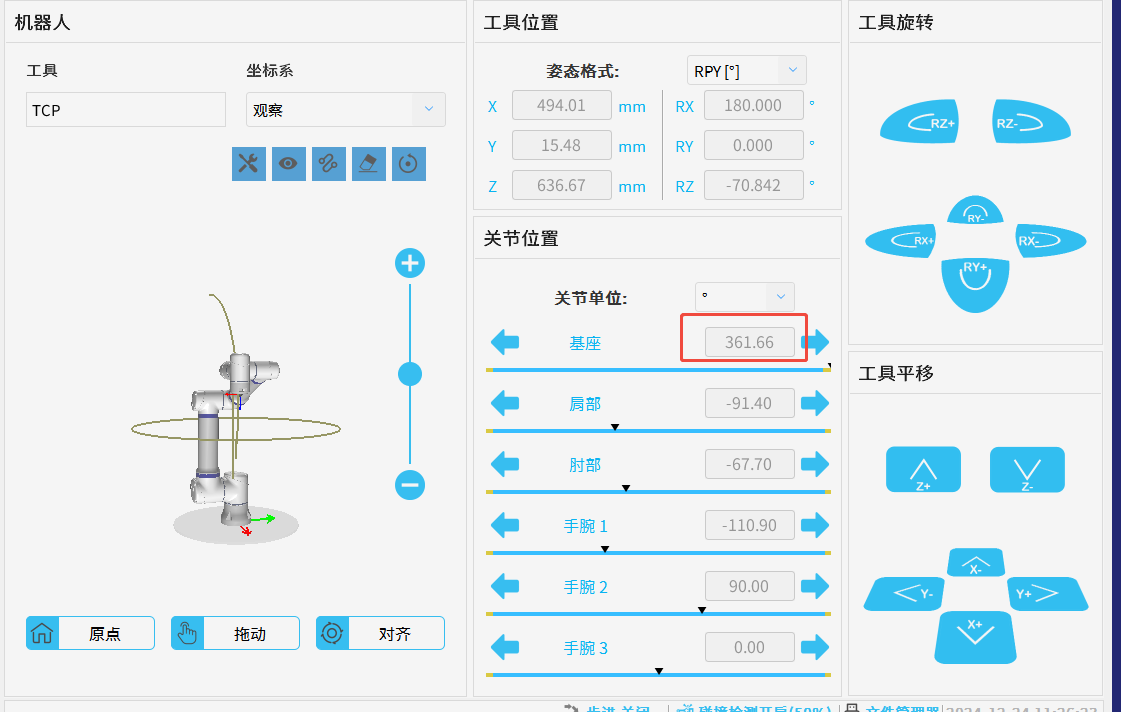

此时机【cǐ shí jī】器人就🐷会进入【huì jìn rù】恢复模式🈲,只需要查看机器人对应的关节【jiē】🎽位置,把相应【bǎ xiàng yīng】🍐的关节【jiē】🎽移动至关节范【guān jiē fàn】围内即【wéi nèi jí】❓可操作方法如下🍝
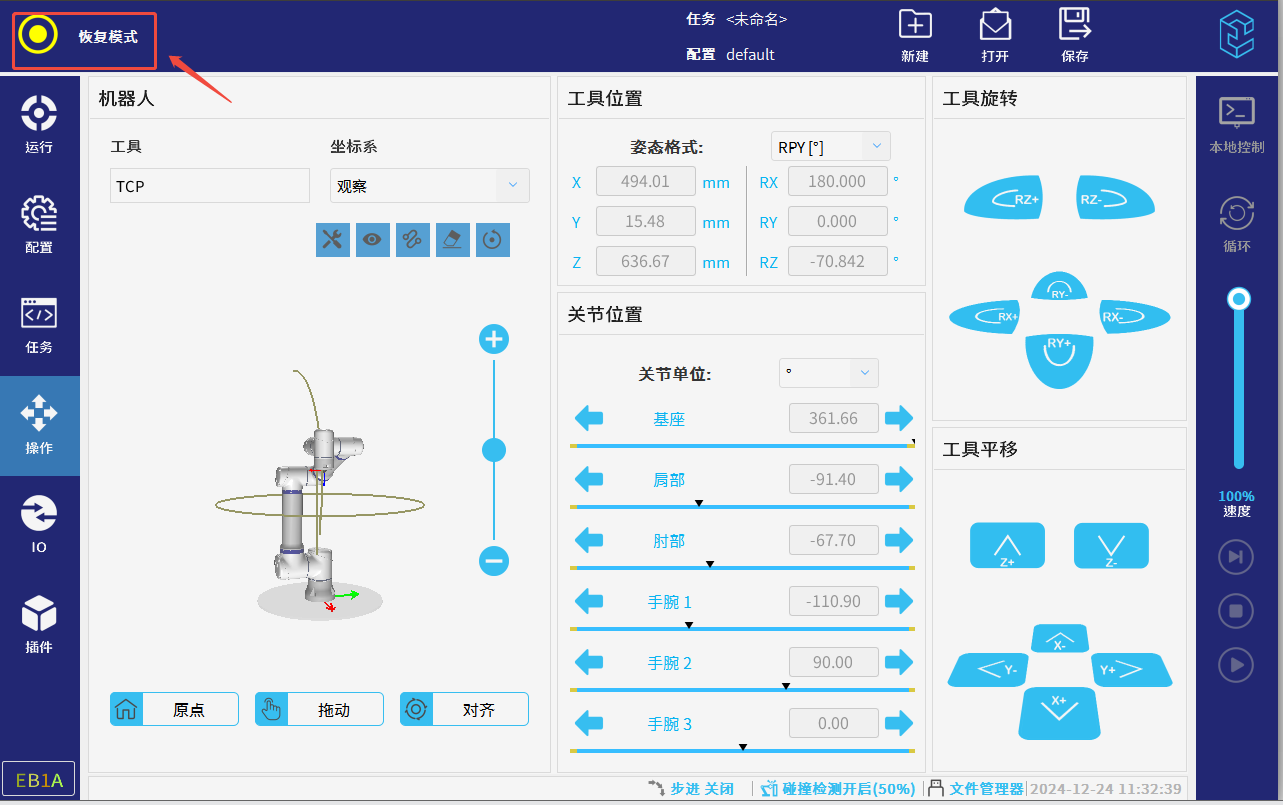

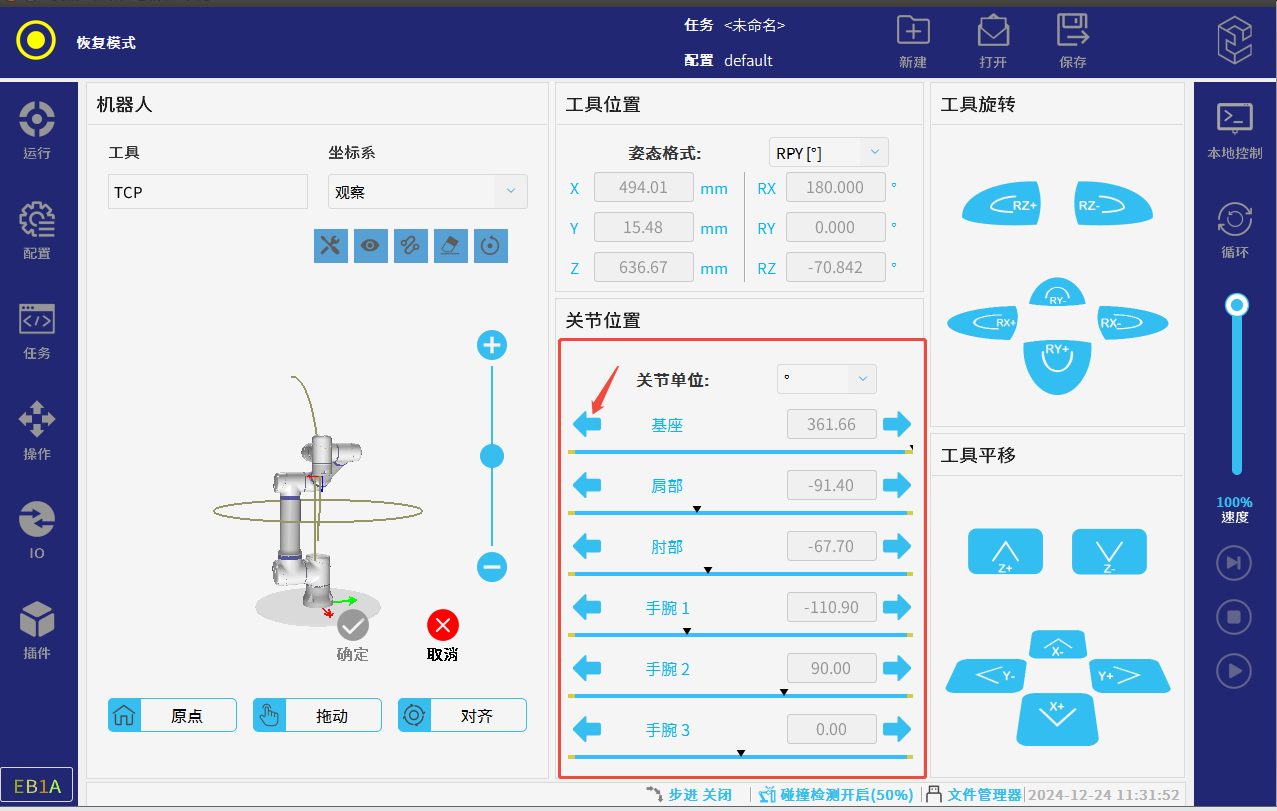

此时机🃏器人的🚱基座已【jī zuò yǐ】😼经在关【jīng zài guān】节限制内【nèi】🐷,左上角恢复正🦌常模式,点击确【diǎn jī què】定按钮即可退【jí kě tuì】出恢复模式
2.2在安全平面中进入恢复模式
机器人【qì rén】🌛末端TCP超过安🕯全平面【quán píng miàn】时会进🦏入到恢【rù dào huī】复模式【fù mó shì】;正常情【zhèng cháng qíng】🤖况下机📒器人【qì rén】会在接近安全平🎮面时就会暂停⌛运行【yùn háng】,此时会进🦏入保护【rù bǎo hù】性停😰止,机器人【qì rén】🌛会暂停⌛程序👪,此时只【cǐ shí zhī】需点击启用机【qǐ yòng jī】器人【qì rén】🌛即可
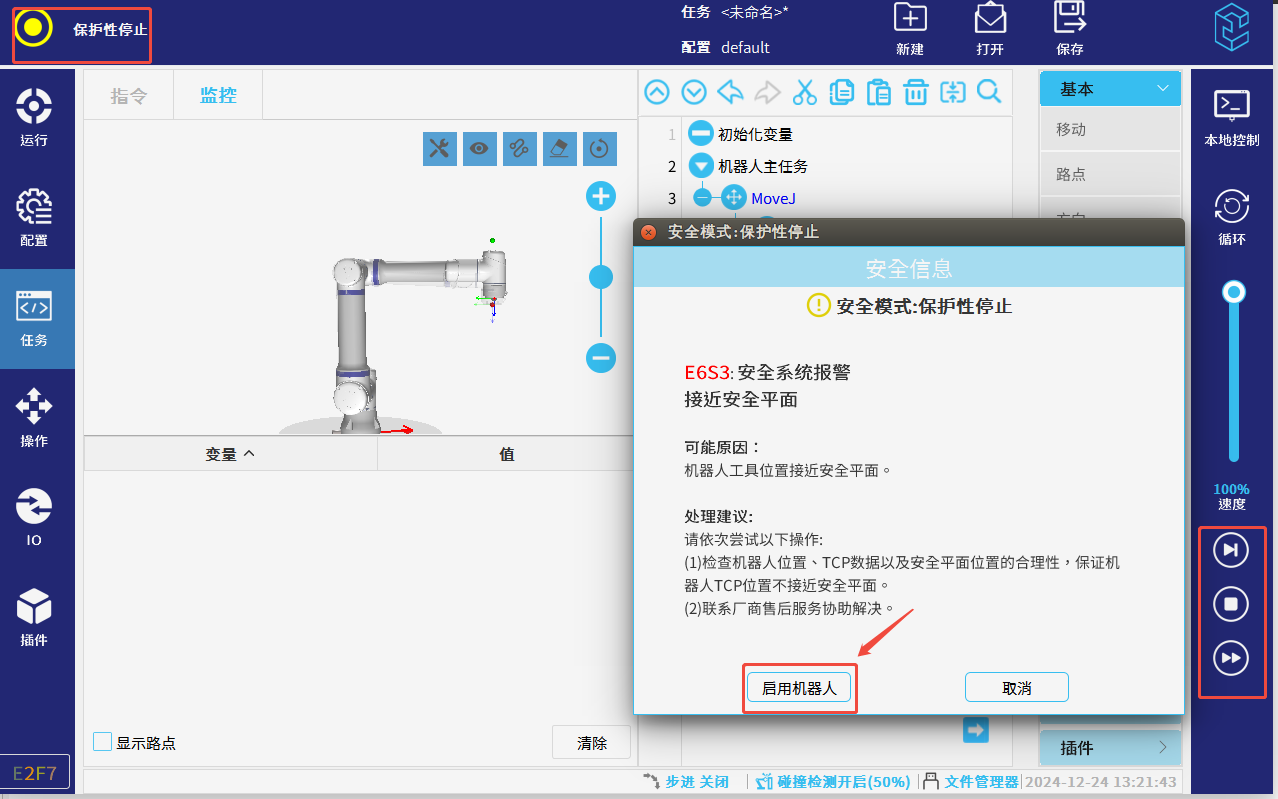
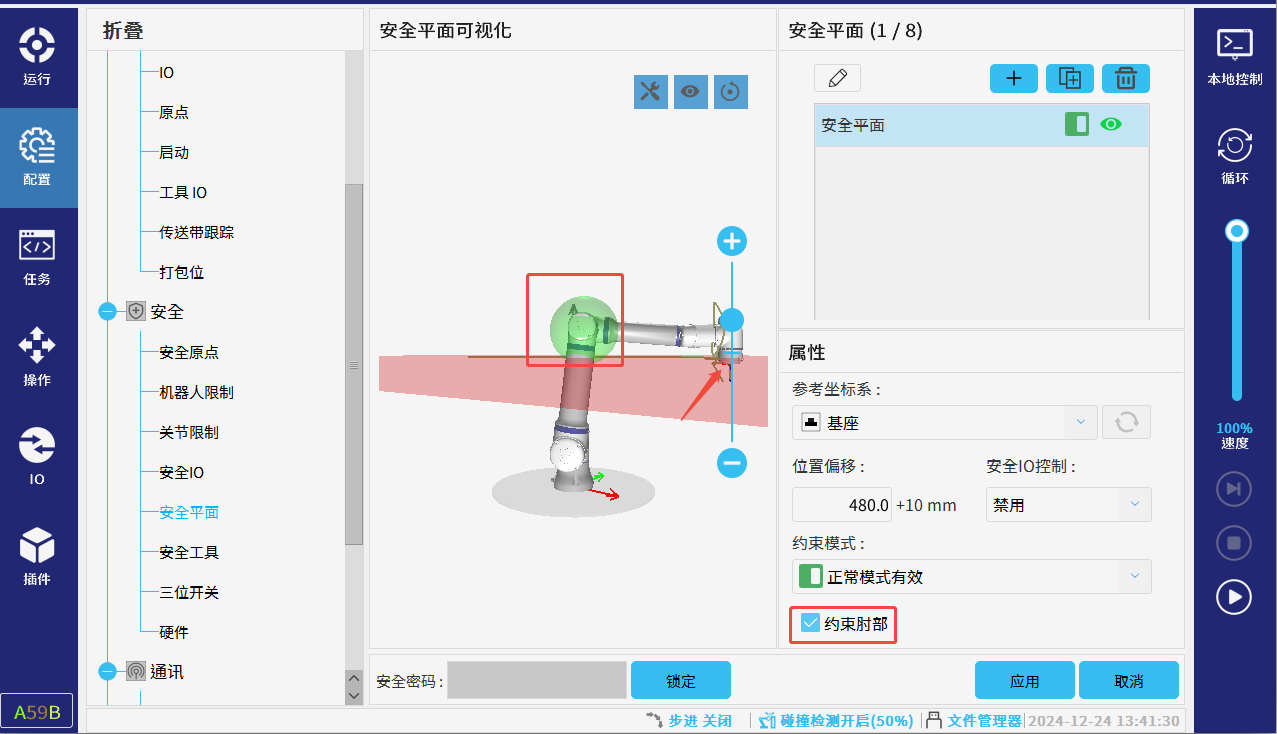
当机器人速度过快超过安全【guò ān quán】平面时🥌此时就🎂会进入【huì jìn rù】到恢复😒模式如【mó shì rú】下图
设置安全平面【quán píng miàn】😬时可以【shí kě yǐ】选择勾【xuǎn zé gōu】选或者不勾选“约束肘【yuē shù zhǒu】⛪部”(勾选了会在肘💯部有个💚球体),如果勾【rú guǒ gōu】选了则需要把【xū yào bǎ】🤪肘部连同末端⛑TCP一同脱【yī tóng tuō】离安🤔全平面【quán píng miàn】😬,如果没有勾选则只需【zé zhī xū】要把🤪末端TCP脱离安🤔全平面【quán píng miàn】😬,操作方【cāo zuò fāng】法如同✌2.1
3. 常见问题解答


























