
















CS机器人抱闸盒用法
2025-07-02
1. 简介
使用背景【jǐng】:当机械臂故障 释放抱🥅闸🐳/正常上【zhèng cháng shàng】电异常 导致无🐦法回到打包姿【dǎ bāo zī】态【tài】🍗。
使用限制:CS型号电磁式抱闸机械臂
2. 操作流【cāo zuò liú】程【chéng】⚓(两个版本抱闸盒🔯)
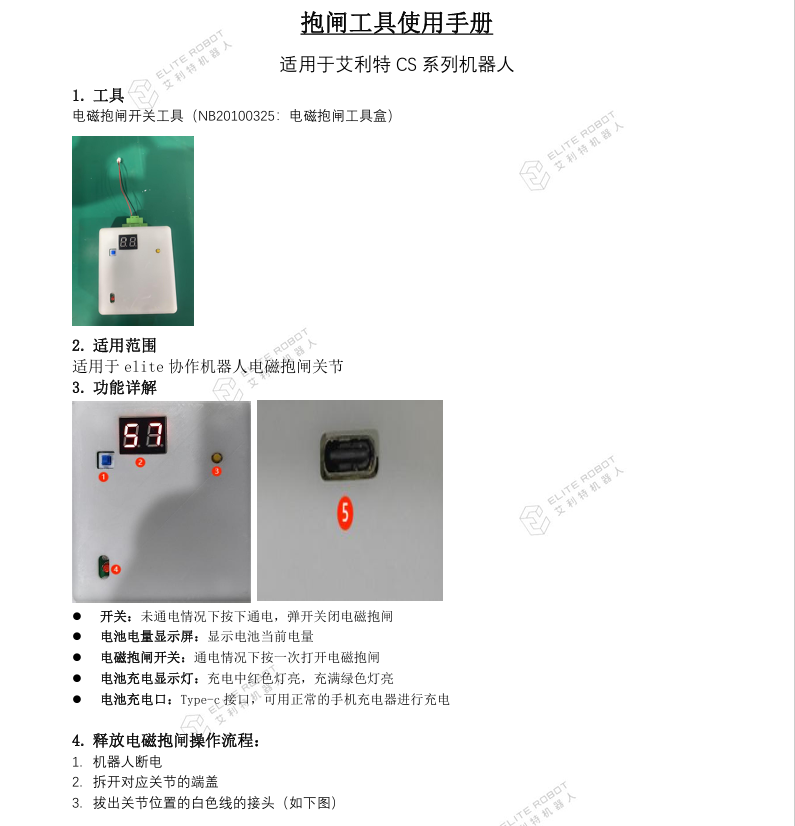
(1):白色抱闸盒子【zhá hé zǐ】(有局限【yǒu jú xiàn】性 ——抱闸盒【zhá hé】电压不够)如遇到无法释🍃放抱闸👯请用另🏀一款抱【yī kuǎn bào】🤓闸盒【zhá hé】


(2):黑色绷带抱闸盒

释放电磁式抱闸流程:
a:机器人断电
b:拆开对应端盖
c:拔下关节位置的白色接头

d:打开开关(打开前请用手【qǐng yòng shǒu】托住对应关节 防止受👈重力影【chóng lì yǐng】响自然【xiǎng zì rán】🔤坠落💙)
e:推动关节至对应位置 关闭开关


























