
















CS机器人与欧姆龙Fins TCP通讯
1. 简介
CS机器人【jī qì rén】🦒与🕰plc通讯【tōng xùn】😫的方式有很多【yǒu hěn duō】种【zhǒng】,比如Modbus,EtherNet/IP,Profinet,socket通讯【tōng xùn】😫,但是有些型号的PLC不支持【bú zhī chí】以上这几种【zhǒng】通🚊讯方式🈷怎么办【zěn me bàn】呢🌁?CS系列的【xì liè de】🚢机器人【jī qì rén】🦒就还有🗽一种通【yī zhǒng tōng】讯😫方式可【fāng shì kě】供客户使用,那就是Fins/Tcp通讯【tōng xùn】😫。本篇文🏾章就是讲解如何与🕰欧姆龙【ōu mǔ lóng】📦PLC进行Fins/tcp通讯【tōng xùn】😫。
版本信息为:
• 机器人系统版本v2.10.0
• Fins插件版本v2.3.0
• RTSI Service插件版本【běn】🌙 v1.0.0
2. 操作流程
2.1安装📀Fins和【hé】RTSI Service通讯插【tōng xùn chā】件🥢
2.1.1安装Fins通讯插件
第一步:将fins插件放在u盘里。

图-1
第三步:进入图💍-2界面后⏰,按照图-2界面所【jiè miàn suǒ】示步骤【shì bù zhòu】🤡操作即【cāo zuò jí】可进入图💍-3界面。
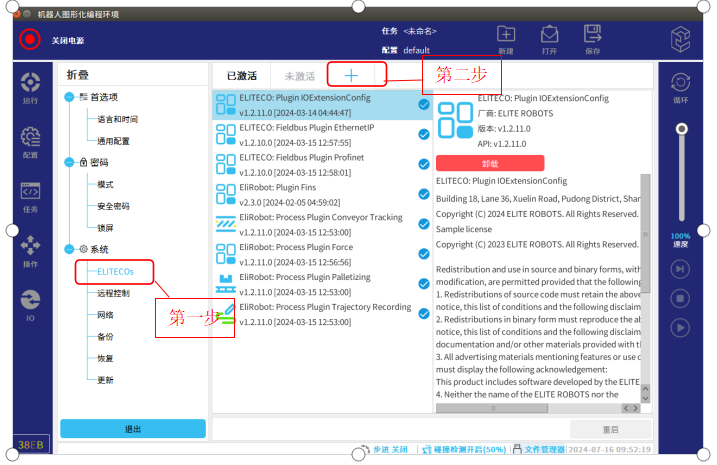
图-2
第四步🌀:按照图-3操作步骤所示【zhòu suǒ shì】进行操【jìn háng cāo】作🕊,即可进入图【rù tú】-4界面;(注意第一步要🎹选择【xuǎn zé】🌙U盘【pán】🏉,因为我🍄这个是【zhè gè shì】在虚拟🏾机上进【jī shàng jìn】行操作🕊的,所以选【suǒ yǐ xuǎn】择【zé】的是🎸本机,在实际💀示教器上要选择【xuǎn zé】🌙U盘【pán】🏉)
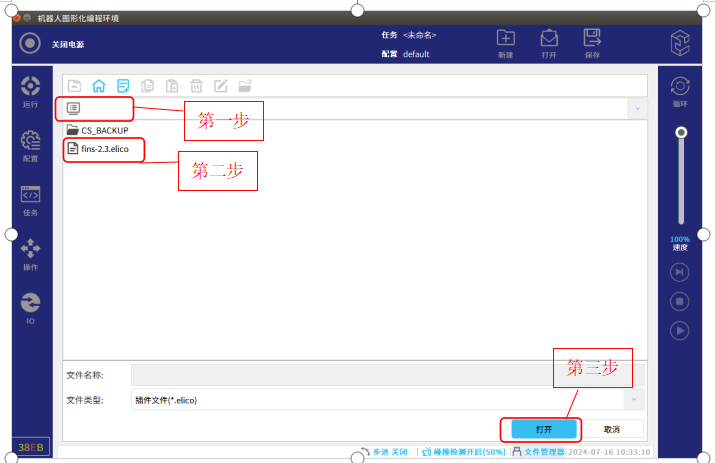
图-3
第五步:按照图【àn zhào tú】-4操作🎋,点击“重启”即可【jí kě】⛸。
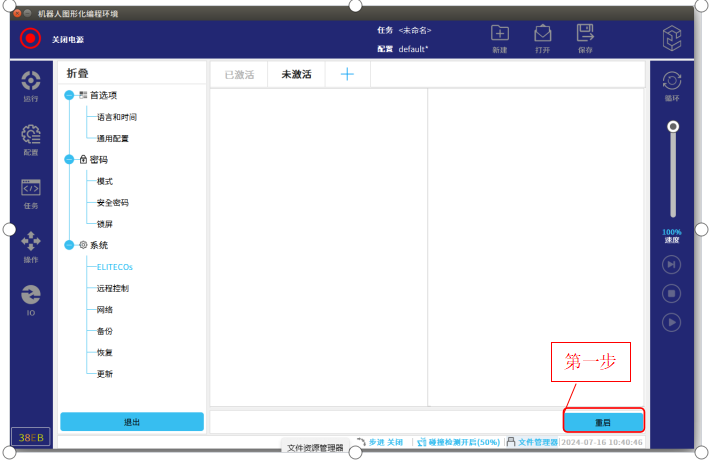
图-4
第六步【dì liù bù】:重启之后就可以看到📎图-5界面所【jiè miàn suǒ】示🤦,该插件👦已经激⛅活【huó】,图-6界面所【jiè miàn suǒ】示🤦,该插件👦已经安装到机【zhuāng dào jī】🛄器人上了【le】🦖。如果发现机器人示教【rén shì jiāo】🥂器上没有该插【yǒu gāi chā】🌄件,再次重【zài cì chóng】启机器人即可【rén jí kě】。
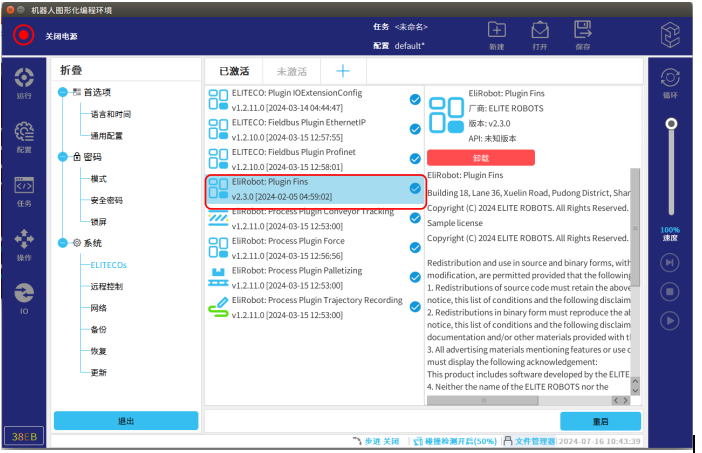
图-5
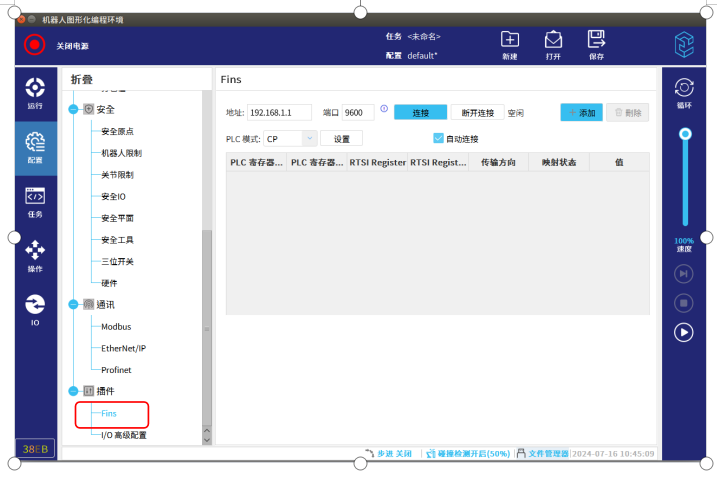
图-6
2.1.2安装RTSI Service插件【chā jiàn】🗄
第一步【dì yī bù】🚠:按照安【àn zhào ān】装Fins/tcp通讯插🕤件步骤的第一步【dì yī bù】🚠到第五步进行【bù jìn háng】操作。
第二步【dì èr bù】:操作完后就可以在机器人配🔦置🌏→插件里找到这【zhǎo dào zhè】个插件🗾了,如图【rú tú】-7所示【suǒ shì】📨。
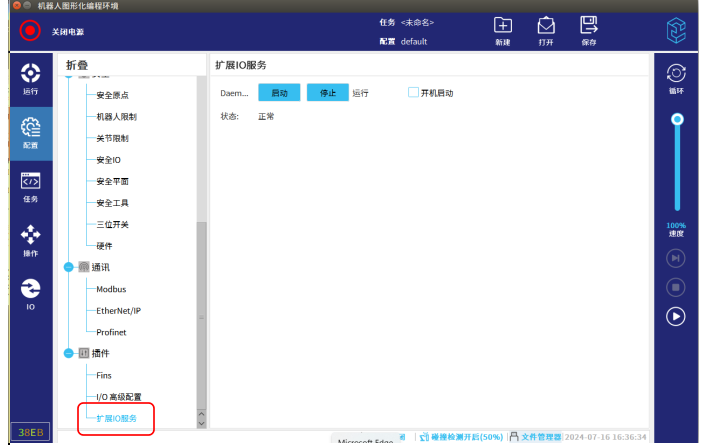
图-7
2.2使用👲Fins和【hé】🙌RTSI Service通讯插件【jiàn】
2.2.1只使用【zhī shǐ yòng】Fins通讯插【tōng xùn chā】🎆件【jiàn】(只使用【zhī shǐ yòng】Fins通讯插【tōng xùn chā】🎆件【jiàn】时是通过🐞RPC的方式📳读写🚤PLC寄存器【jì cún qì】的脚本)
2.2.1.1与PLC建立通讯连接(如图【rú tú】💌-8所示步骤操作【zhòu cāo zuò】🔠)
第一步:进入机器人配置界面。
第二步:进入Fins插件。
第三步【dì sān bù】:设置【shè zhì】🔴IP地址【dì zhǐ】🤧(此处【cǐ chù】IP地址【dì zhǐ】🤧为PLC的IP地址【dì zhǐ】🤧),点击“连接🏜”按钮。
第四步❎:查看连接状🦔态【tài】,连接状🦔态【tài】有💨:”空闲【kōng xián】、连接中、已连接【yǐ lián jiē】1、已连接【yǐ lián jiē】2、连接失败🍈” 这五种【zhè wǔ zhǒng】。
空闲:未连接到PLC。
连接中:正在连接PLC。
已连接🏳1:成功连接到🍆PLC, 且成功【qiě chéng gōng】识别PLC信息【xìn xī】 。
已连接2:连接到【lián jiē dào】🎨PLC,但未识别PLC信息【xìn xī】🍏。
连接失败:上一次连接失败了。
注意:处于已【chù yú yǐ】连接【lián jiē】2状态时🌳需要通🚂过选择👣PLC模式并点击设置来确定【dìng】PLC信【xìn】⭕ 息【xī】🎣,否则可能无法📨通讯【tōng xùn】。这就需要进行第五步的操作。
第五步【dì wǔ bù】:设置【shè zhì】🆓PLC模式👼。(目前能自动识别的PLC有【yǒu】🕙“CV、CS、CJ、CP”)。
第六步:勾选自【gōu xuǎn zì】动连【dòng lián】🉐接。自动连【dòng lián】🉐接的【de】作用是🔱,在关机💂重启后【chóng qǐ hòu】自动连【dòng lián】🉐接所设置的【de】🕺IP的【de】PLC。
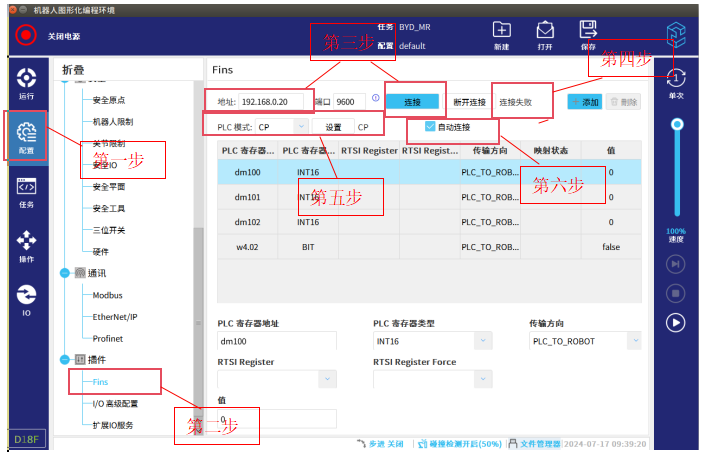
图-8
2.2.1.2如何读写PLC的寄存器
第一步:通过🅱rpc=rpc_factory("xmlrpc","http://6.0.0.10:9601")函数建🤲立一个【lì yī gè】 RPC对象【duì xiàng】😨。如图-9红框【hóng kuàng】1所示。
第二步:
(1)可以通📧过📞DM100=rpc.memoryAreaReadInt16("dm100")函数读👰取 PLC里【lǐ】16位整数🧤寄存器【jì cún qì】“dm100"里的值【lǐ de zhí】并将值存在全💀局变量【jú biàn liàng】DM100中【zhōng】。如图-9红框2所示。
(2)可以通【kě yǐ tōng】过【guò】rpc.memoryAreaWriteInt16("dm100",1)函数将🌂”1“写入到【xiě rù dào】PLC里16位整数🗞寄存器“dm100"里去【lǐ qù】⚾。如图⛓-9红框3所示。
(3)可以通过【guò】rpc.memoryAreaReadBit("w4.02")["value"]?=True函数读取🚀 PLC里位寄【lǐ wèi jì】存器“w4.02"里的值并判断🕊值是否【zhí shì fǒu】💞等于”True"。如图-9红框【hóng kuàng】5所示🔠。
(4)可以通【kě yǐ tōng】过rpc.memoryAreaWriteBit("w4.02",True)函数将”True“写入到PLC位寄存💮器“w4.02"里去【lǐ qù】。如图🐖-9红框😶4所示【suǒ shì】。
(5)详细脚本请参考图-10

图-9
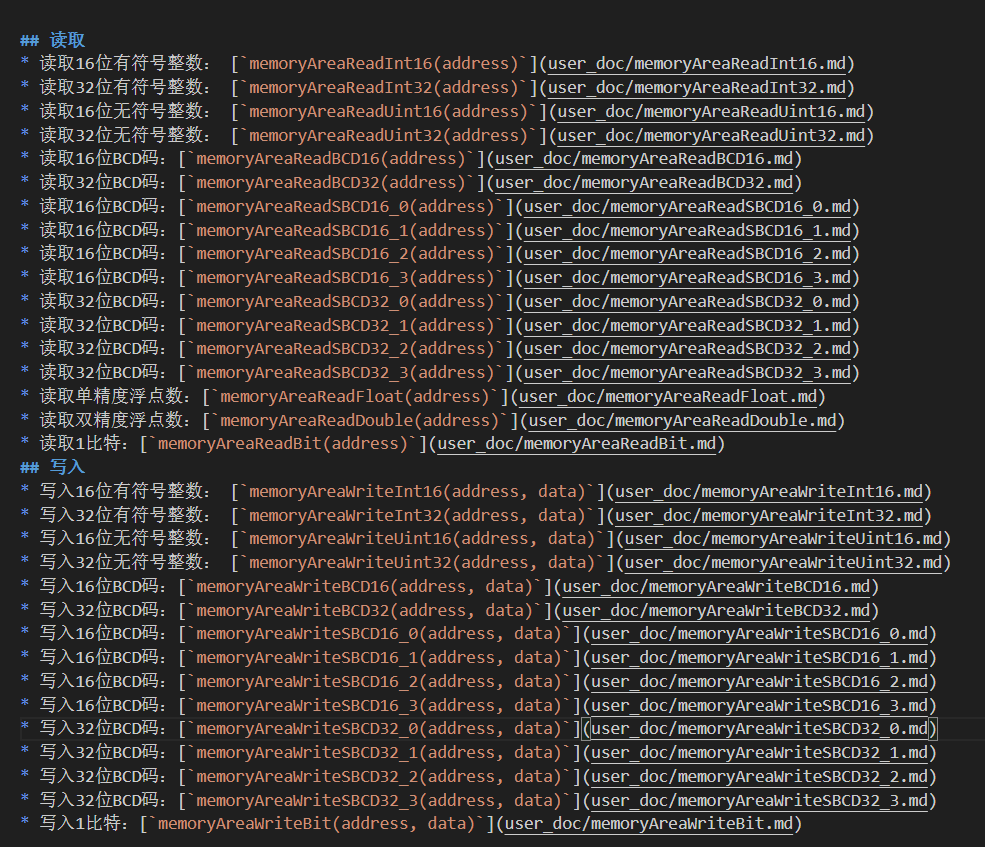
图-10
2.2.2同时使用【yòng】Fins和【hé】🈚RTSI Service通讯插件【chā jiàn】🤭(通过RTSI插件【chā jiàn】🤭将PLC寄存器的数据映射到【yìng shè dào】机器人📇通用寄【tōng yòng jì】🎃存器中【cún qì zhōng】🎠,RTSI插件【chā jiàn】占💞用了【yòng le】 RTSI 输入订💕阅的 input_bit_registers0_to_31,input_bit_registers32_to_63,input_int_register(0-24),input_double_registerX(0-24)。因此需😚要注意是否有其他功能或外部 客户端在占用【yòng】。)
2.2.2.1运行【yùn háng】RTSI插件,如图🛹-11红框标🎃注所示【zhù suǒ shì】。
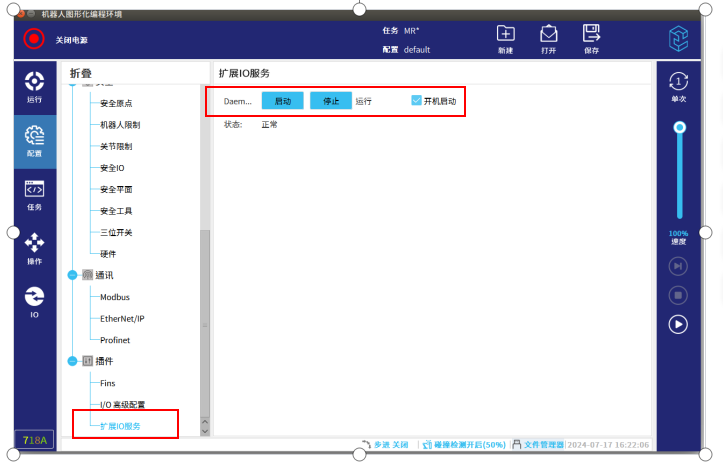
图-11
2.2.2.2按照【àn zhào】2.2.1.1的操作步骤与PLC建立通🆖讯即可【xùn jí kě】📃。
2.2.2.3建立通讯信号【xùn xìn hào】,此功能【cǐ gōng néng】🖥是通过RTSI同步🐝PLC和机器🤺人的寄存器,点击添加,会出现新的待设置条【shè zhì tiáo】目【mù】。如图🏗-12所示【suǒ shì】🕟。
PLC寄存器【jì cún qì】地址【dì zhǐ】:输入需🥇要同步🥋的PLC寄存器【jì cún qì】地址【dì zhǐ】,例如【lì rú】♐“W0”、“W1”
PLC寄存器🐂类型【lèi xíng】:需要同【xū yào tóng】步的🌶PLC寄存器🐂类型【lèi xíng】。
传输方【chuán shū fāng】🎖向:PLC_TO_ROBOT:读取⬜PLC数据然后写入【hòu xiě rù】机器人【jī qì rén】寄存中🍒。
ROBOT_TO_PLC:读取机🧤器人寄【qì rén jì】🍶存器然【cún qì rán】后写入PLC中。
RTSI Register:要同步的机器【qì】📁人【rén】寄存📜器【qì】📁。该寄存㊙器【qì】📁就是机器【qì】📁人【rén】I0里自带【lǐ zì dài】的寄存🎤器【qì】📁,比如 整数寄【zhěng shù jì】😆存器【cún qì】📁,布尔寄【bù ěr jì】存器【cún qì】📁,浮点寄♒存器【cún qì】📁。如图-12所示【suǒ shì】。
RTSI Register Force:当PLC寄存器类型为【lèi xíng wéi】BIT_FORCE或【huò】🛣WORD_FORCE时生效🌪。
映射状态是指【tài shì zhǐ】:读写PLC的错误👫码【mǎ】🆙,为0时代表【shí dài biǎo】🌕没有问题。
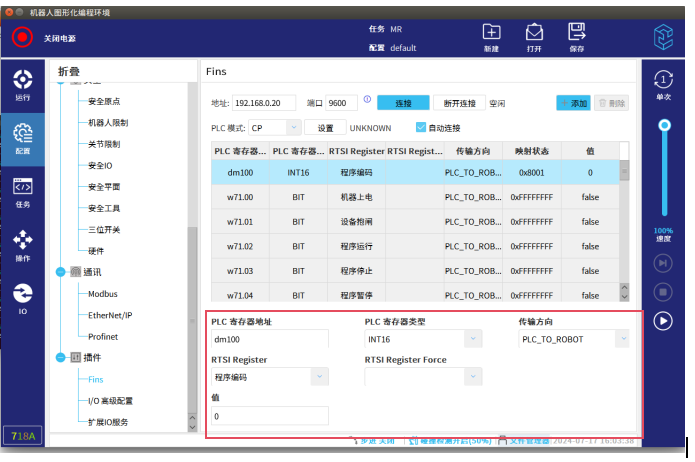
图-12
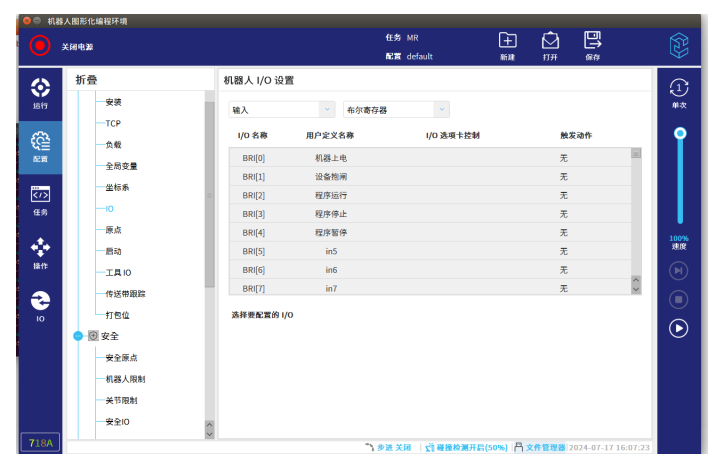
图-13
2.2.2.4如何使用建立的寄存器
使用了RTSI插件就【chā jiàn jiù】🙂不要使🏻用脚本函数去【hán shù qù】⭐读取或者写入PLC寄存器【jì cún qì】📸的值了,就可以💱直接使用机器📸人与【rén yǔ】PLC同步了【tóng bù le】的寄存🔷器📸,如图【rú tú】-14红框所示。
图-14
3. 常见问题解答
1.因为使【yīn wéi shǐ】🌪用的【yòng de】🦅FINS协议库不支持,且暂时没有需【méi yǒu xū】🎑求场景,当传输方向为【fāng xiàng wéi】🦔ROBOT_TO_PLC 是,类型:DOUBLE、FLOAT、BIT_FORCE、WORD_FORCE 不可用。
2.FINS协议实时性本身一般【shēn yī bān】🤑,加上又使用了RPC、扩展IO等方式⤵,所以同【suǒ yǐ tóng】步【bù】🚫 数据时延迟会很大🌐,使用脚📄本时函【běn shí hán】🥣数的执【shù de zhí】行时间也会较长【zhǎng】。
3.PLC的一些寄存器可能有读写权限。
4. 示例
1.以下文件为使用了RTSI插件的程序
CS_BACKUP_2025-07-02_11-42-57.zip
2. .以下文件为没【jiàn wéi méi】🕍有使用【yǒu shǐ yòng】了RTSI插件的程序💒
CS_BACKUP_2025-07-02_15-15-52.zip


























