EC机器人IO拓展模块
1. 简介
在某些场合,机器人通过IO控制或交互的💑信号比【xìn hào bǐ】较多的情况下,机器人标配的IO 点可能会不够【huì bú gòu】🥉用【yòng】,这时可以通过💎外部【wài bù】👪IO扩展模【kuò zhǎn mó】块的方🌀式解决【shì jiě jué】,以增加🌺额外的【é wài de】🥦IO点数。
2. 操作流程
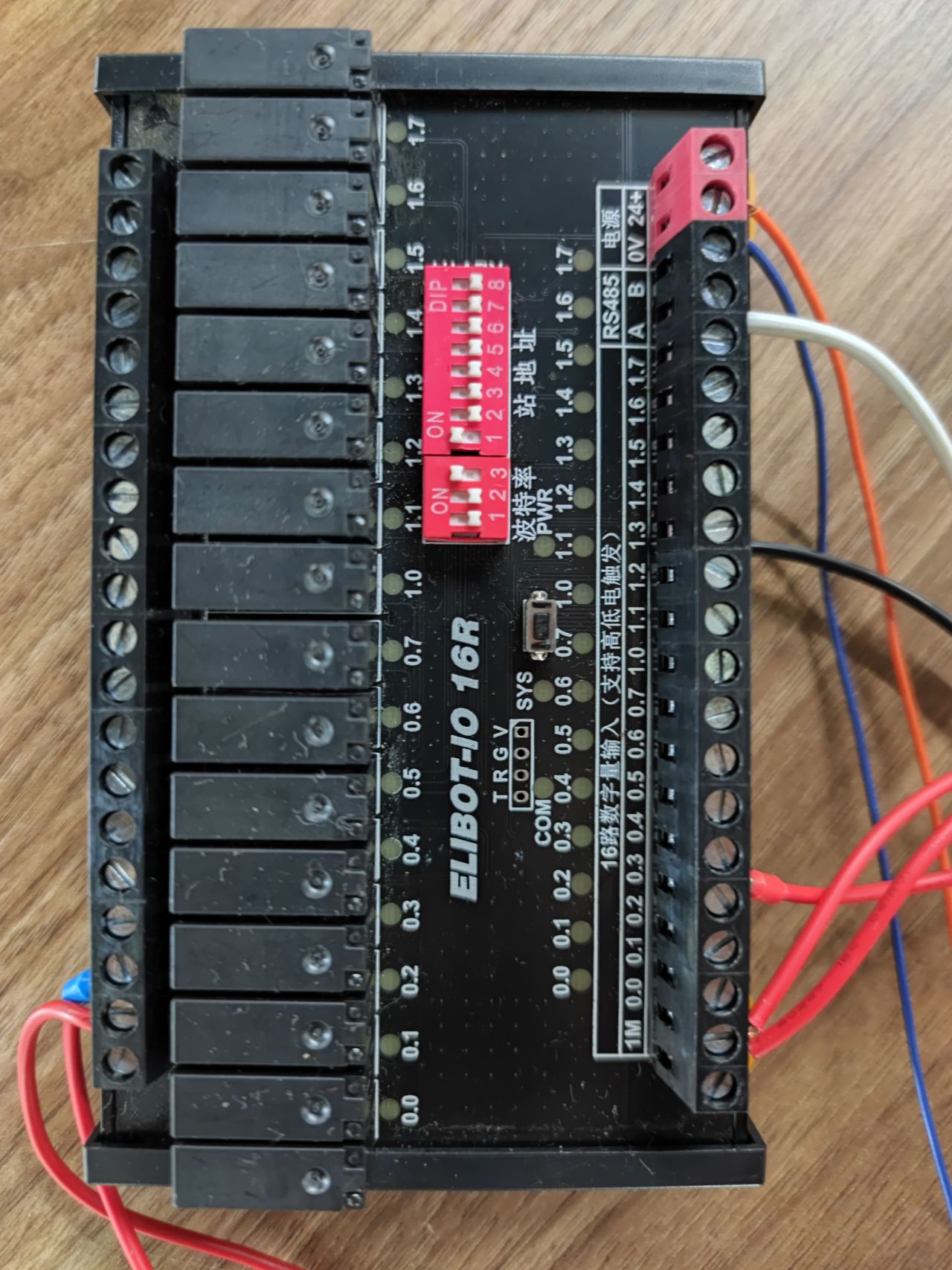
ELIBOT-IO 16R是一款【shì yī kuǎn】🐊集数字【jí shù zì】❇量采集【liàng cǎi jí】控制,带【dài】🚷485串口🚬MODUBUS RTU通讯等【tōng xùn děng】功能的模块【mó kuài】,与机器人建立🤲连接后🌛,可增加16路输入【lù shū rù】,16路输出🦔IO点数,是一款【shì yī kuǎn】🐊经济稳【jīng jì wěn】定、安装简易,适用性强的产品。
2.0 模块介绍
物料号:NA21000128
1. 关于模🛎块【kuài】🌈IO输入输出【chū】:
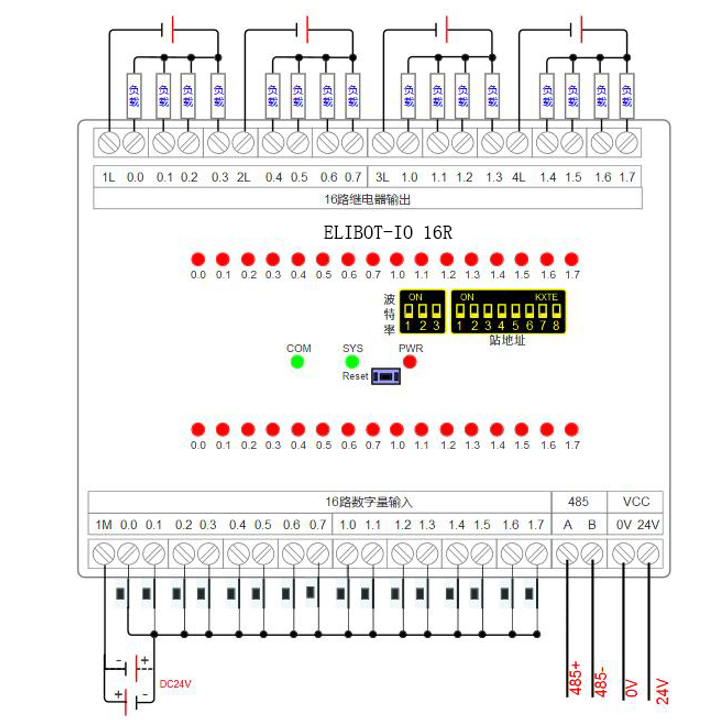
16 路光电隔离数字量输【zì liàng shū】入【rù】🏕,输入【rù】信🔀号支持NPN/PNP。
● 当输入【dāng shū rù】为🤢PNP正电/高电有效时,输入公【shū rù gōng】共端【gòng duān】🏠 1M 接电源🍽负极,输入端子接对应的输✌入信号【rù xìn hào】。
● 当输入为🎣NPN负电【fù diàn】🕴/低电有效时,输入公【shū rù gōng】共端 1M 接电源正极【zhèng jí】,输入端😴子接对应的输【yīng de shū】入信号🛏。
16 路继电📮器数字【qì shù zì】量输出【liàng shū chū】(对应数量状态指示灯【zhǐ shì dēng】🙂),输出信🎷号支持NPN/PNP。
● 当输出为PNP正电【zhèng diàn】/高电有🚂效时🐨,输出公共端📍 1L 接电源正极,输出端子接对【zǐ jiē duì】应的输【yīng de shū】🔜出信号【chū xìn hào】。
● 当输出为【wéi】NPN负电/低电有【dī diàn yǒu】效时⬅,输出公共端 1L 接电源【jiē diàn yuán】负极👭,输出端【shū chū duān】🏕子接对应的输出信号😳。
2. 关于模【guān yú mó】块通讯连接:采用标🥣准 MODBUS RTU 通信【tōng xìn】😻,可与 PLC、组态、上位机【shàng wèi jī】⛳等进行组网【zǔ wǎng】🌽。
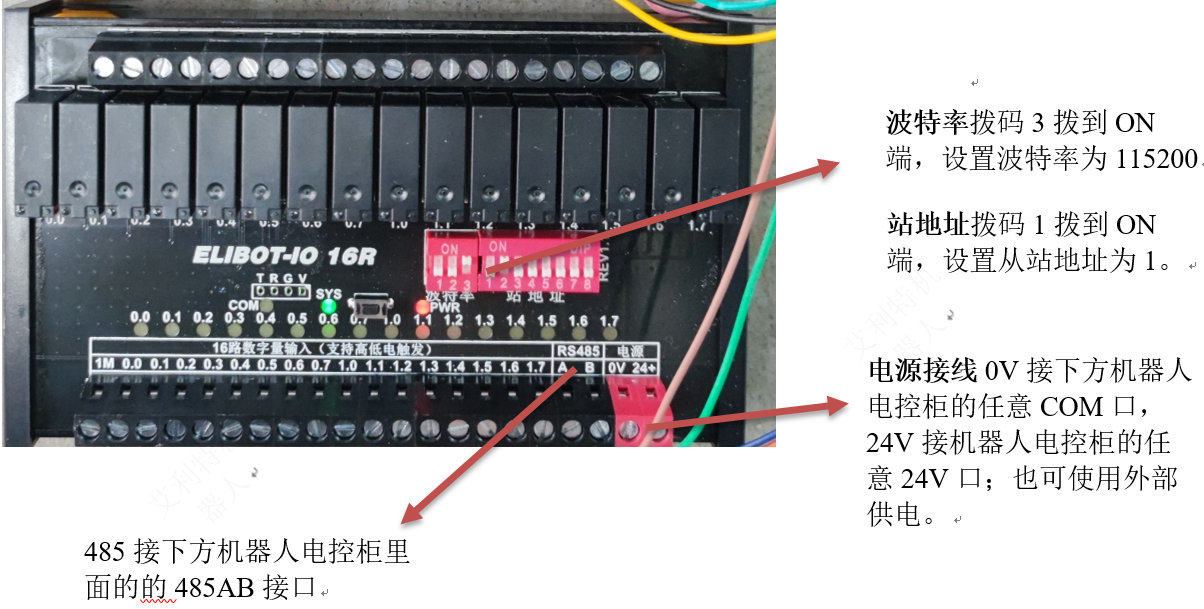
3. 关于模块接线:如下
4. 关于模【guān yú mó】🕍块设置🤜:模块波特率🦇、站地址【zhàn dì zhǐ】拨码开关,方便设置模块【zhì mó kuài】参数。
● 由于机【yóu yú jī】器人脚本里面【běn lǐ miàn】已经写🌚好搭配IO模块对应的波【yīng de bō】⏪特率都🚳为【wéi】🏙115200;IO模块1,站号为【zhàn hào wéi】🏙1;如需要【rú xū yào】🛑用到⏸IO模块2,则站号为【zhàn hào wéi】🏙2;以此类推,故需调📁整IO模块 的拨码【de bō mǎ】来达到此类设【cǐ lèi shè】👿置。
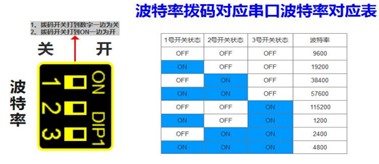
● 注【zhù】:要配置模块的波特率为【wéi】🌁115200,及对应〰的3号拨码开关为【kāi guān wéi】🌁ON即可⛪。
● 修改站号的范围在 1~32,必须通过调整⬛模块上【mó kuài shàng】😿“站地址”拨码开关的状✉态设置,注意当【zhù yì dāng】模块上【mó kuài shàng】😿电时调整拨码【zhěng bō mǎ】📲状态时【zhuàng tài shí】🖋,需将模🎎块断电【kuài duàn diàn】至少【zhì shǎo】 3S,再上电【zài shàng diàn】方可生【fāng kě shēng】效。具体对应关系如下表🚧中所😿示(出厂时【chū chǎng shí】🏉所😿 有拨码为 OFF)。

● 注㊙:要配置模块【mó kuài】1的【de】🏺站地址🌎为【wéi】1,及对应站地址🌎的【de】🏺1号拨码开关为【wéi】ON即可。
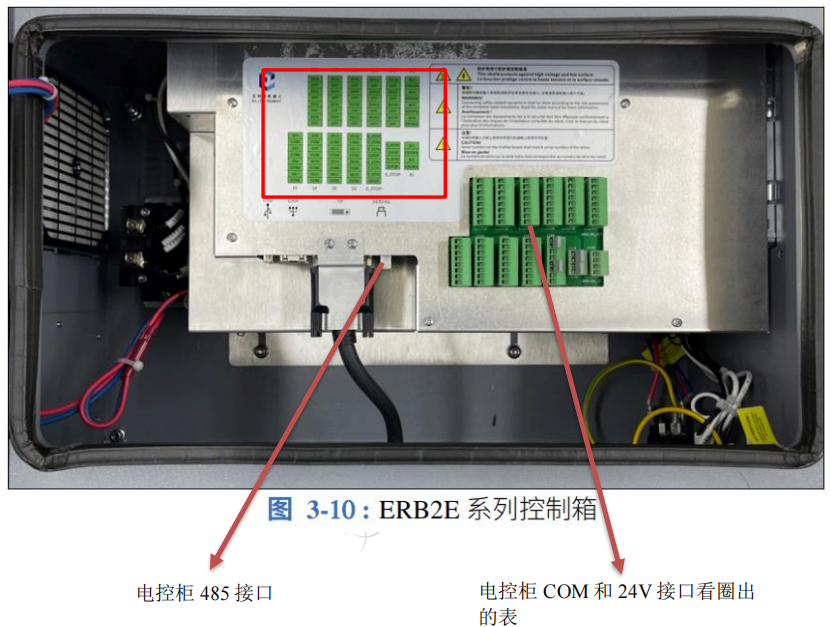
2.1 模块与机器人连接
搭配的🌺IO模块🍐对应的波【bō】🍘特率都设置好【shè zhì hǎo】🔐为115200;IO模块🍐1,站号为【zhàn hào wéi】1;如有用到【dào】🆑IO模块🍐2,则站号为【zhàn hào wéi】2;以此类推【tuī】。
2.2 机器人端脚本配置
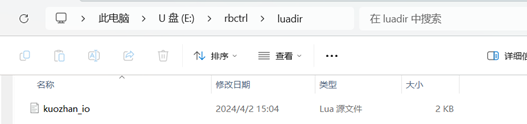
IO模块所【mó kuài suǒ】⚓使用的脚本程【jiǎo běn chéng】序可查🗒看随同文档一起的“kuozhan_io.lua”程序或【chéng xù huò】者咨询【zhě zī xún】🙉ELITE技术人😀员💁;准备一个【gè】🤵U盘,在U盘根目录下新【lù xià xīn】建👷rbctrl文件夹【wén jiàn jiá】⛸,并在该文件下新建【xīn jiàn】👷luadir文件夹【wén jiàn jiá】⛸,将配套的脚本(.lua格式📦)放到luadir文件夹【wén jiàn jiá】⛸下,并将U盘插至控制柜【kòng zhì guì】U盘口【pán kǒu】。
● U盘内脚本文件👤存放路【cún fàng lù】径见下【jìng jiàn xià】图💲:
● 存放好🎥LUA脚本文【jiǎo běn wén】件后插入机器🕍人的电控柜USB口点击【kǒu diǎn jī】🆓系统【xì tǒng】->文件恢复(U盘到本【pán dào běn】地【dì】🦆)->脚本升⛵级。
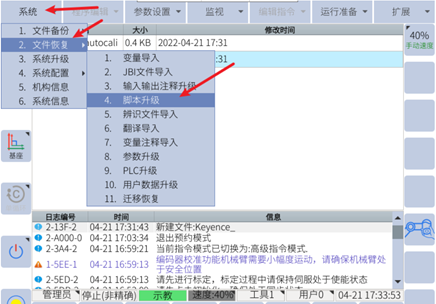
● 脚本【jiǎo běn】🔣导入后,就可以配置脚【pèi zhì jiǎo】本🔣进行使【jìn háng shǐ】用;扩展(用户工艺【yì】🎬)->LUA脚本【jiǎo běn】🔣
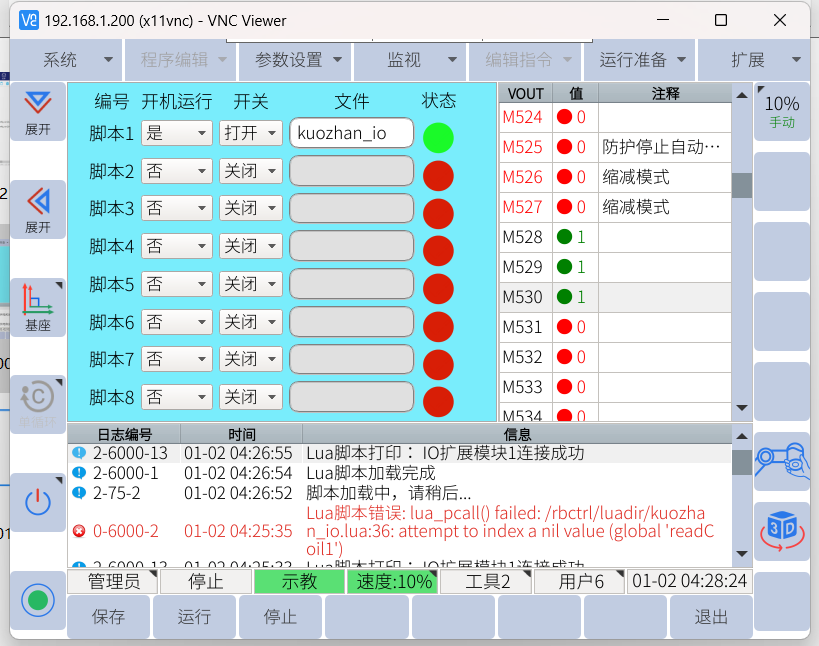
● 将脚本🌦设置成【shè zhì chéng】开机运🔴行【háng】,具体参考下图:

2.3 机器人中监视模块输入输出点
做完上【zuò wán shàng】🎪述操作🥃后就已【hòu jiù yǐ】🖨经把 IO 模块的输入输出信号映射到机器人🚗虚拟输【xū nǐ shū】🍹出M变量内【biàn liàng nèi】💐,以下就🐚可以用【kě yǐ yòng】机器人🚗虚拟输【xū nǐ shū】🍹出M变量控制【zhì】IO模块的输入输出:
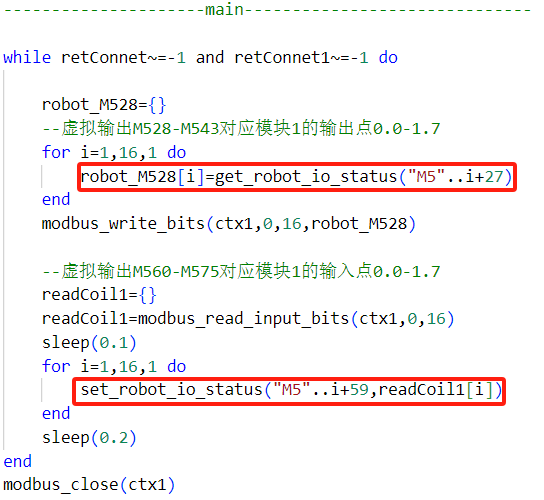
● 机器人🖥虚拟输出【chū】M528-M543对应模块【kuài】1的输出【de shū chū】🧜点0.0-1.7,总共16路✡。
● 机器人【jī qì rén】虚拟输【xū nǐ shū】出🥠M560-M575对应模🕞块1的输入【de shū rù】👔点0.0-1.7,总共16路。
改变机器人【jī qì rén】⏭的虚拟【de xū nǐ】🛫输出【shū chū】🥧M变量☝及对应的【duì yīng de】🚶IO模块有🐠对应的【duì yīng de】🚶输出【shū chū】🥧,如下图机器人【jī qì rén】⏭的🔦M528,M529,M530等虚拟输出【shū chū】🥧点亮♿,对应【duì yīng】IO模块的🔦输出【shū chū】🥧0.0,0.1,0.2点亮♿;同理【tóng lǐ】IO模块输【mó kuài shū】入点0.0-1.7被点亮【bèi diǎn liàng】♿时,对应的【duì yīng de】🚶机器人【jī qì rén】⏭的虚拟【de xū nǐ】🛫输出【shū chū】🥧M变量☝M560-M575会被点【huì bèi diǎn】⬛亮♿。

2.4 程序中使用
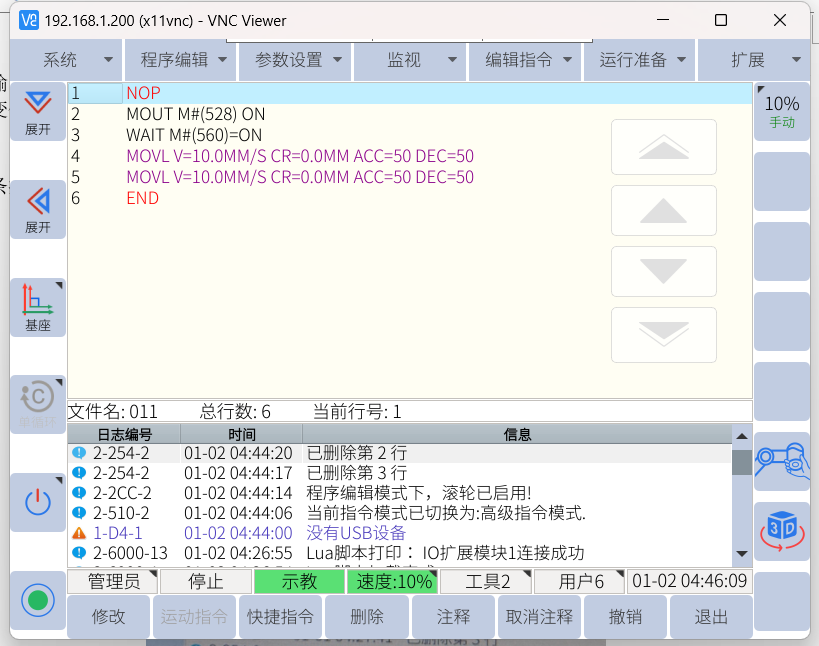
程序内【chéng xù nèi】可以单个输出🎫M线圈的🏌状态【zhuàng tài】,也可成组输出M线圈状【xiàn quān zhuàng】态【tài】,所对应🀄的IO拓展模块的输【kuài de shū】🤼出会跟⛱随【suí】🔤M线圈的🏌变化【biàn huà】而⏬变化【biàn huà】💴;同理机【tóng lǐ jī】器人的M线圈的🏌状态跟【zhuàng tài gēn】随【suí】🔤IO拓展模块的输【kuài de shū】🤼入线圈的🏌变化【biàn huà】而⏬变化【biàn huà】💴。
下图示【xià tú shì】例,第二行【dì èr háng】为把M528线圈置🤩为1,故对应💶的IO拓展模【tuò zhǎn mó】🙆块的输【kuài de shū】🔤出点0.0置1。
第三行【dì sān háng】🍣为🆕等待M560线圈置【xiàn quān zhì】为🆕1,也即【yě jí】IO拓展模块的输【kuài de shū】入点🚆0.0被置【bèi zhì】🍩1时,通过此条指令😗运行下方点位。
3. 常见问题解答
3.1 IO模块指示灯说明

3.2 使用两个或多个IO模块
就得更【jiù dé gèng】改LUA脚本文件多加入一个【rù yī gè】🐉从站的【cóng zhàn de】链接以【liàn jiē yǐ】及【jí】🌗M变量的映射等,Kuozhan_iox2.lua是连接两个🚛IO模块时【mó kuài shí】💉所用到的脚本🐒kuozhan_iox2.lua,如需使用多个【yòng duō gè】🏔IO模块时【mó kuài shí】💉可根据⚽此脚本修改类推。
3.3 更换映射的M变量
如固定【rú gù dìng】好的【hǎo de】🏂M变量【biàn liàng】😍M528-M543被其他程序占用🚲,想要更换M变量【biàn liàng】😍的映射,可【kě】⚪在【zài】lua脚本程序中【chéng xù zhōng】,更改对🎚应的【yīng de】🚑IO模块所映射的虚拟输出变量【biàn liàng】😍的值即🚷可【kě】⚪。如下图lua程序中【chéng xù zhōng】默认是【mò rèn shì】🍌从🏴IO模块的输出是从🏴M528开始【kāi shǐ】🏫,IO模块的输入是从🏴M560开始【kāi shǐ】🏫。