
















EC机器人IO接线
1. EC机器人【jī qì rén】IO接线介绍⏳
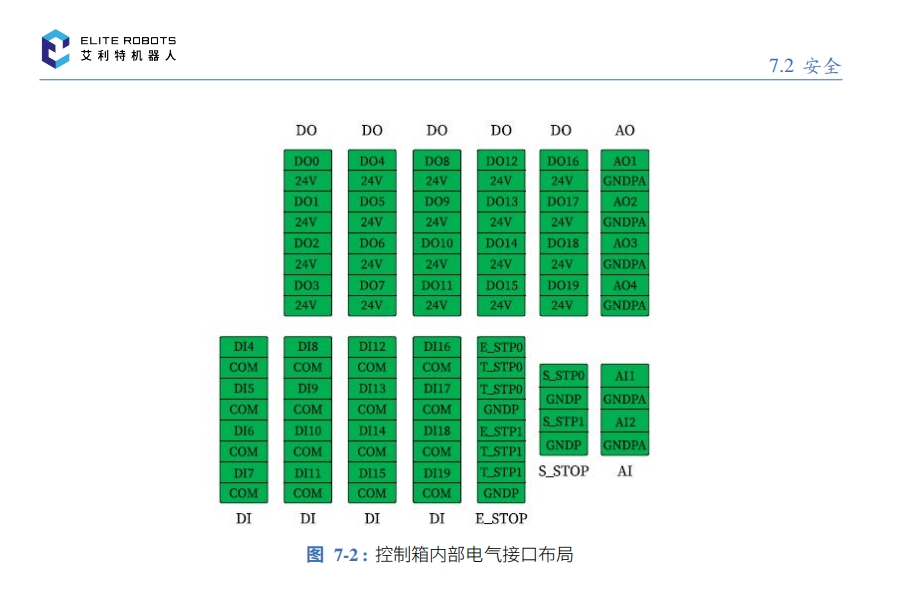
EC机器人🚓控制柜【kòng zhì guì】提供了丰富的【fēng fù de】IO接口【jiē kǒu】💞,其中包括16路数字【lù shù zì】🎤输入【shū rù】接口【jiē kǒu】💞,20路数字【lù shù zì】🎤输出【shū chū】🚏接口【jiē kǒu】💞(出厂时【chū chǎng shí】默认均【mò rèn jun1】🀄为NPN类型【lèi xíng】,输入【shū rù】可进行🛁NPN与PNP类型【lèi xíng】切🦖换,输出【shū chū】🚏不可配置【zhì】),4 路模拟【lù mó nǐ】📡输出【shū chū】🚏,2路模拟【lù mó nǐ】📡输入【shū rù】(-10V~10V),急停接口【jiē kǒu】💞与防护【yǔ fáng hù】停止接口【jiē kǒu】各🛵两组。(机器人🚓内部自【nèi bù zì】带📇24V电源【diàn yuán】💯,端子上所有24V内部已✒短接,所有COM已短接🕙)
2. 接线说明
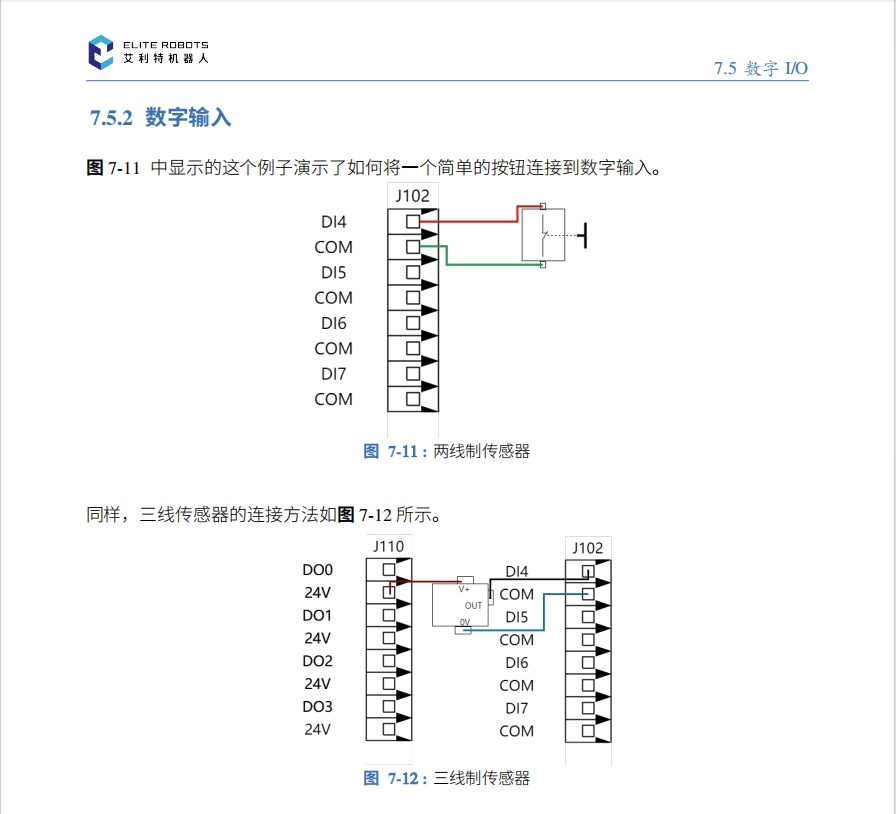
2.1 数字输入接线说明(NPN)
2.2 数字输入PNP如何配置
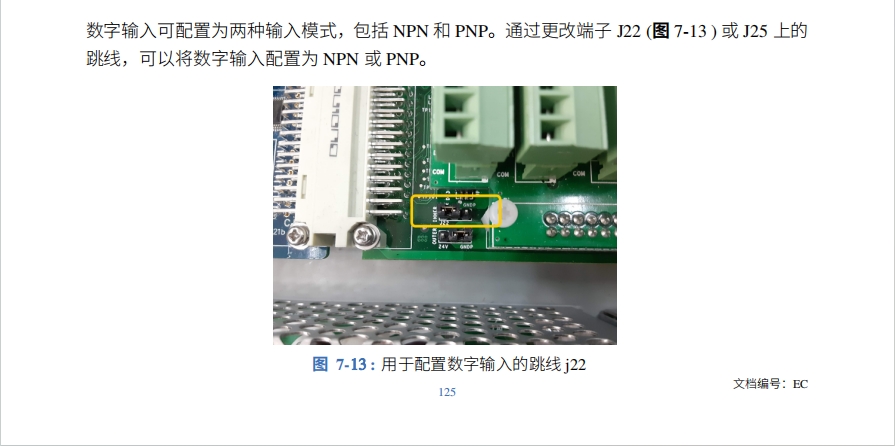
接线方式说明:
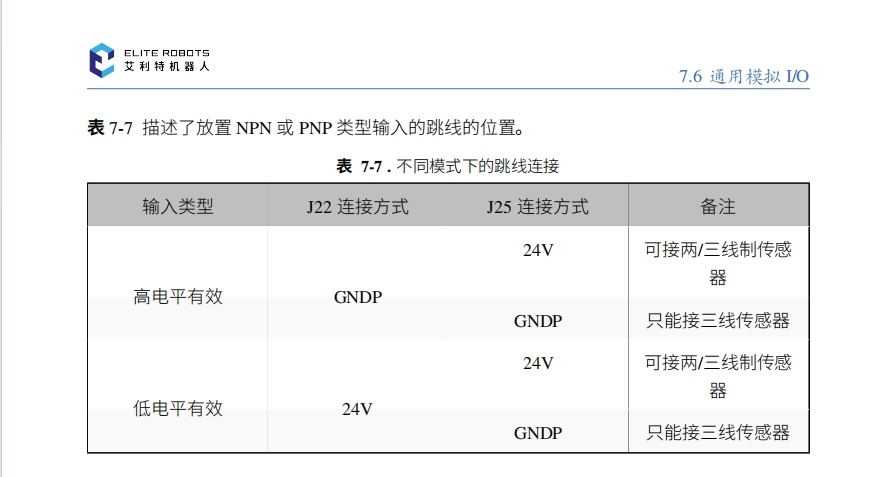
1、 J22与【yǔ】🤘24V短接【duǎn jiē】🗂,J25与【yǔ】🤘GNDP短接【duǎn jiē】🗂;NPN型输入。
DI口为【kǒu wéi】📻24V,COM口为【kǒu wéi】📻0V;所以需要给DI口输入📽0V,机器人【jī qì rén】得到信【xìn】⛎号【hào】🗝。简单理解DI口与COM口是一【kǒu shì yī】个常开型开关【xíng kāi guān】,短接到🕜一起即可得到信【xìn】⛎号【hào】🗝。
2、J22与🈂24V短接【duǎn jiē】👆,J25与🈂24V短接【duǎn jiē】👆;NPN型输入。
DI口为【kǒu wéi】🍽24V,COM口为【kǒu wéi】🍽24V;所以需要给DI口输入OV
3、J22与🦑GNDP短接【duǎn jiē】,J25与🦑GNDP短接【duǎn jiē】;PNP型输入【xíng shū rù】🥎。
DI口为【kǒu wéi】0V,COM口为【kǒu wéi】0V;所以需【suǒ yǐ xū】🚣要给👑DI口输入24V.
4、J22与【yǔ】🏬GNDP短接【duǎn jiē】,J25与【yǔ】🏬24V短接【duǎn jiē】;PNP型输入。
DI口【kǒu】➰为【wéi】0V,COM口【kǒu】➰为【wéi】24V;所以外部需要给🌋DI口【kǒu】➰24V.
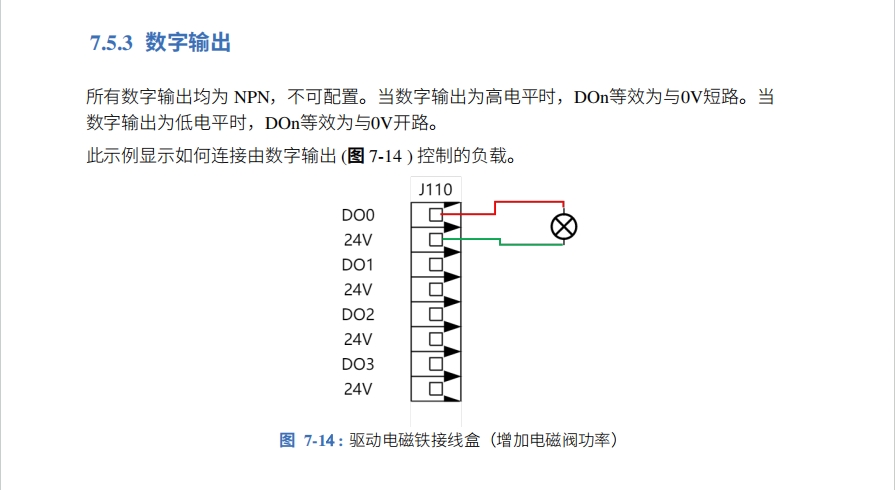
2.3 数字输出接线说明
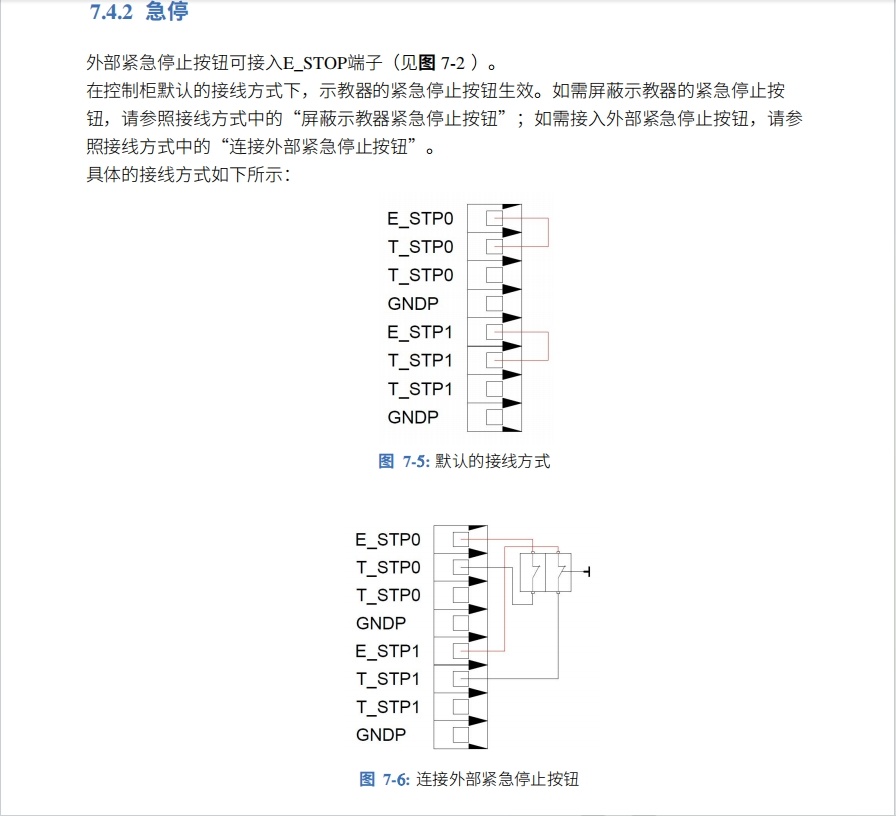
2.4 急停回路说明
2.5 防护停止接线说明

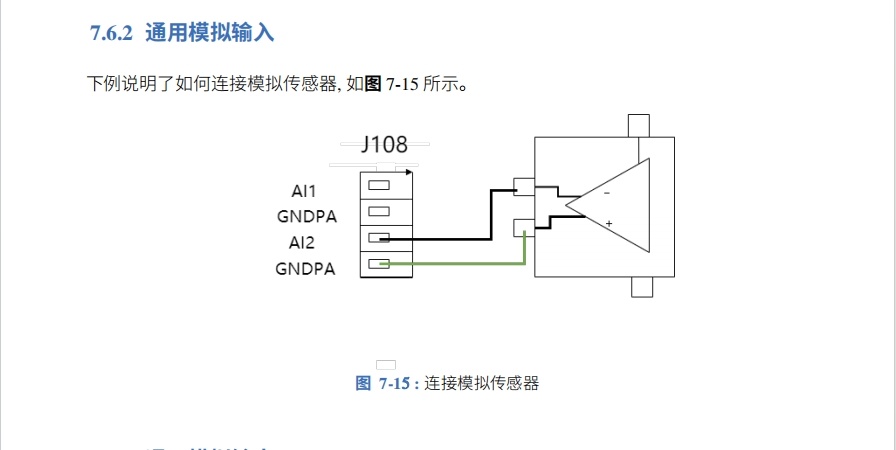
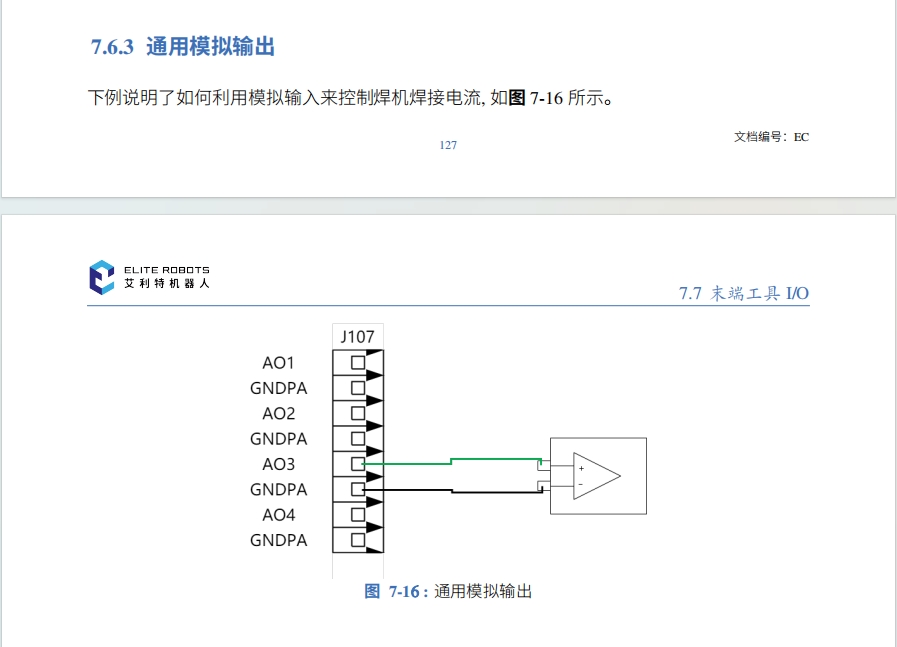
2.6 模拟输入与输出接线说明
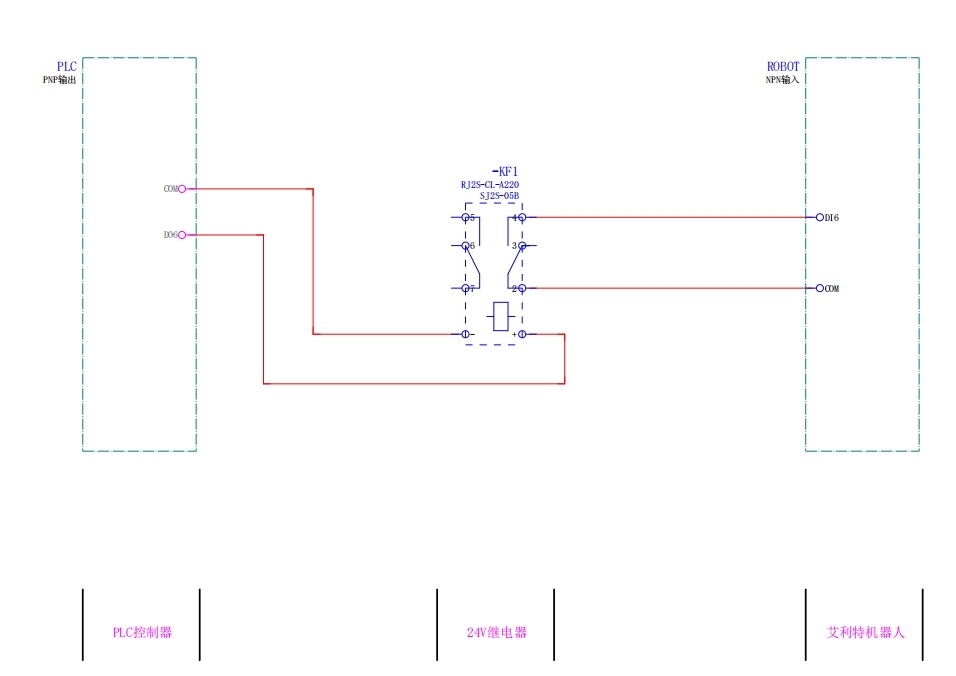
3. 通过继电器进🚱行【háng】📜NPN与PNP转换【zhuǎn huàn】
在实际【zài shí jì】⛹使用过🍴程中可能会遇到各种🎣传感器与【yǔ】🍕PLC,PNP与【yǔ】🍕NPN的都有【de dōu yǒu】,这种情况可以通过中间继电【jiān jì diàn】👒器进行信号转换,具体方👬法为将【fǎ wéi jiāng】机器人的输出【de shū chū】信号接在继电【zài jì diàn】🌟器的线🛋圈端,负载接在继电【zài jì diàn】🌟器的触点端,当机器【dāng jī qì】🙉人输出信号时,线圈得💎电🌟,触点吸【chù diǎn xī】合【hé】,负载得电🌟。(输入接🐕法则相【fǎ zé xiàng】反,下图为输入接🐕法【fǎ】)
4. 常见问题解答
4.1.问:接好传【jiē hǎo chuán】📵感器后收不到【shōu bú dào】传感器🐹信号
答:确定好传感器【chuán gǎn qì】🏻NPN与🏤PNP类型是【lèi xíng shì】否与【fǒu yǔ】🏤机器人一🌯致🎴,不一致【bú yī zhì】🎴可以切🍨换机器【huàn jī qì】人输入【rén shū rù】类型或者使用🍰继电器进行转换


























