CS机器人模式功能介绍
1. 简介
本文主要介绍CS机器人的三种【de sān zhǒng】模式以📧及功能介绍,本地模【běn dì mó】♿式🛁以及远【yǐ jí yuǎn】程模【chéng mó】🔦式🛁,本地模【běn dì mó】♿式又分🍼为手动【wéi shǒu dòng】模式以📧及自动🚆模式🛁
2. 模式介绍及说明
2.1手动模式
手动模【shǒu dòng mó】🐜式即机器人需要用示【yào yòng shì】🌷教器来【jiāo qì lái】控制机器人的移动,一般用于调试📙阶段,进行点位示教【wèi shì jiāo】🙂以及流【yǐ jí liú】🚙程验证
2.2自动模式
2.21.自动模式的介绍
自动模【zì dòng mó】式即可➡以根据所编辑🏫的树状图程序🍮自动运【zì dòng yùn】行【háng】
2.2.2如何打开自动模式
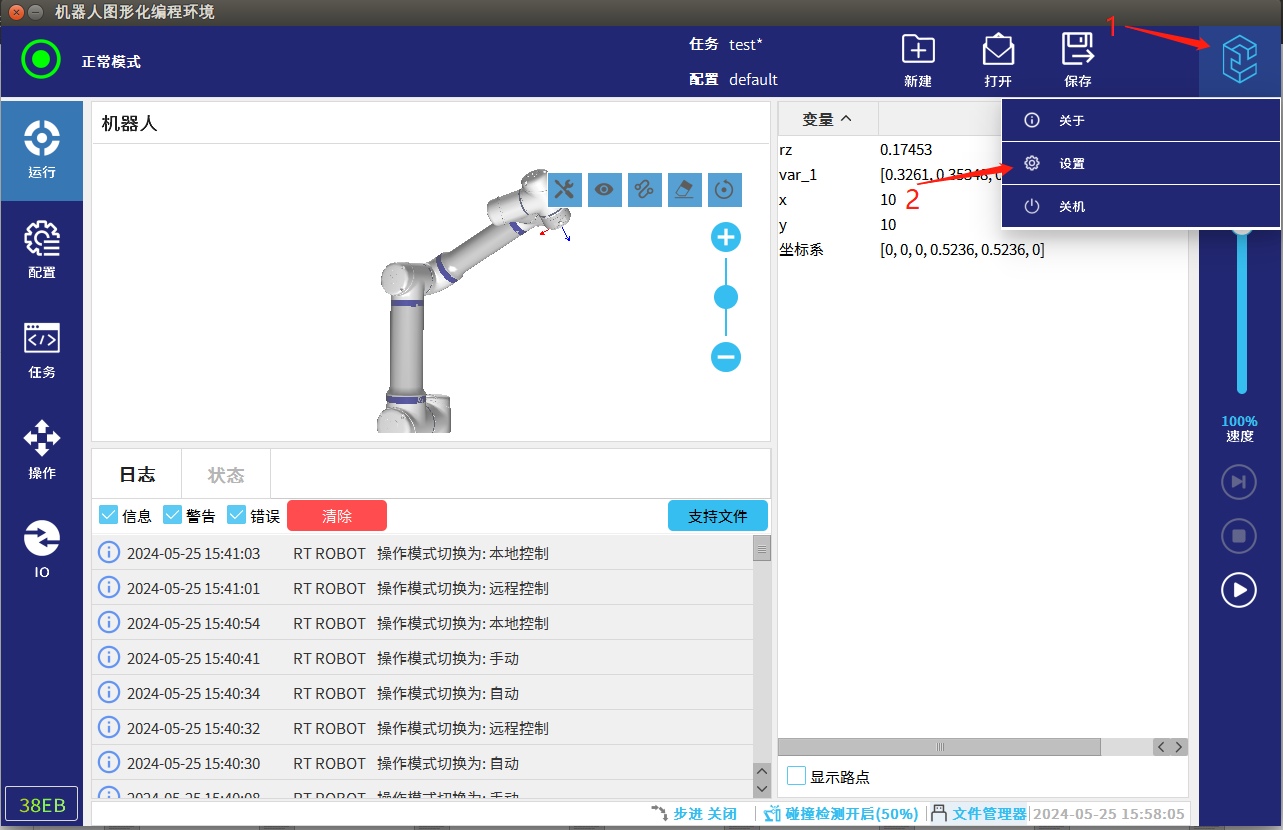
首先点【shǒu xiān diǎn】击右上角的【jiǎo de】ELITE图标,然后点🎉击设置🔵
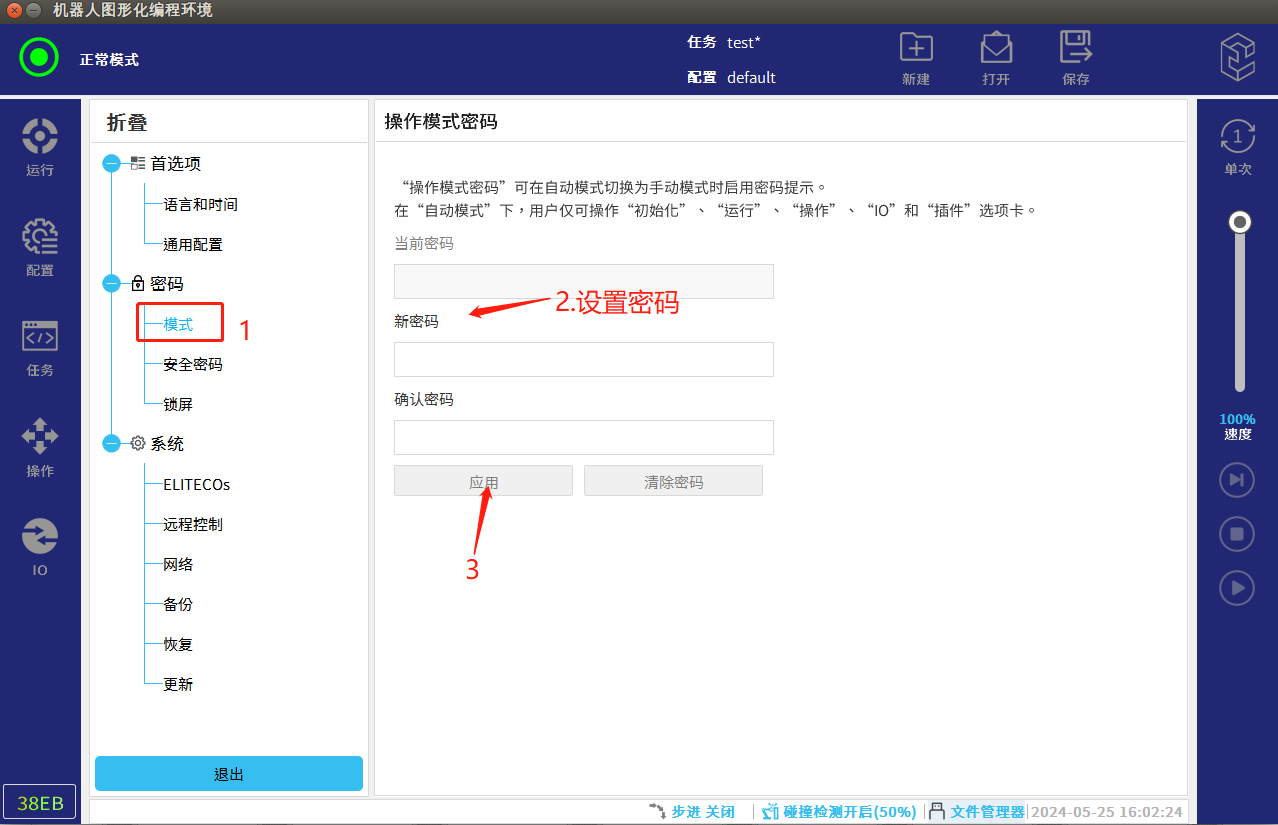
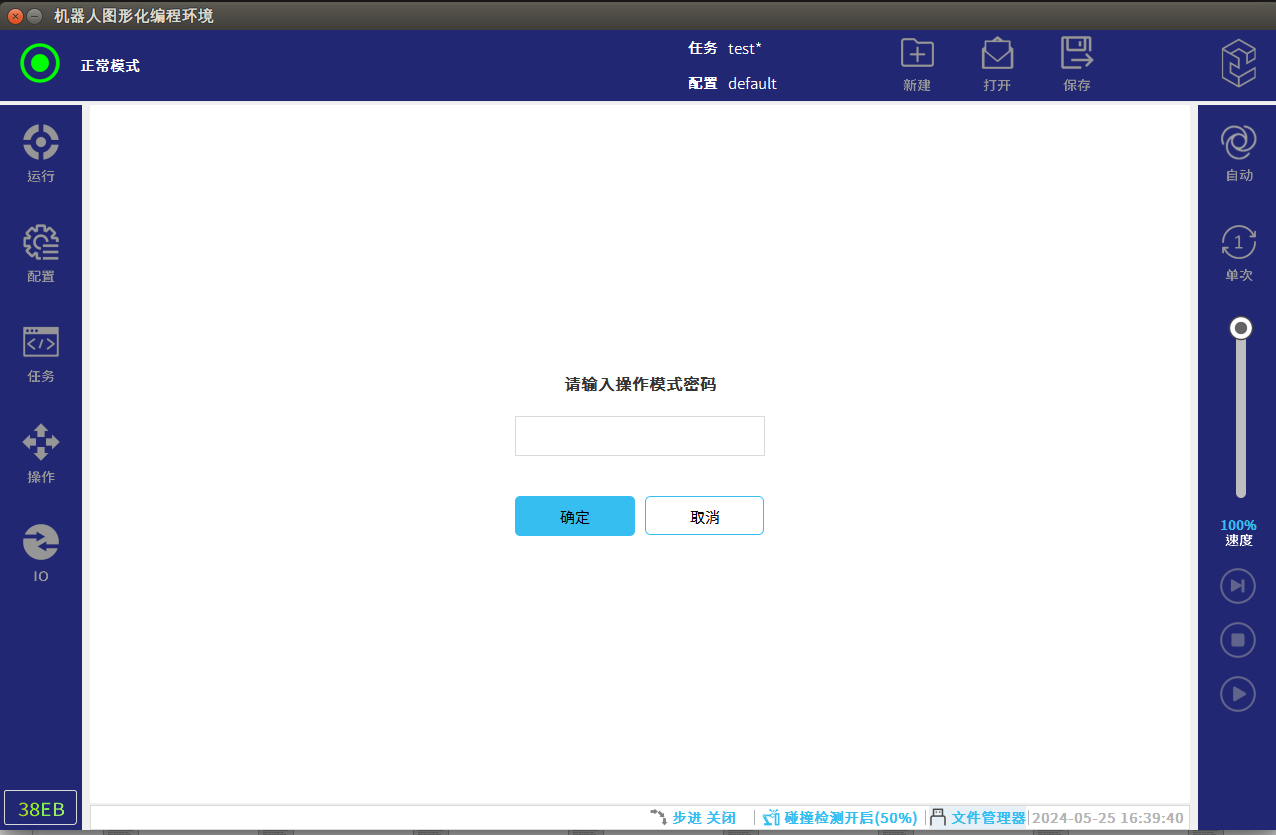
进入到🐦下图界💵面后首🔙先点击模式,然后设【rán hòu shè】🍩置密码【zhì mì mǎ】,点击应用然后退出当前界面【qián jiè miàn】即可【jí kě】
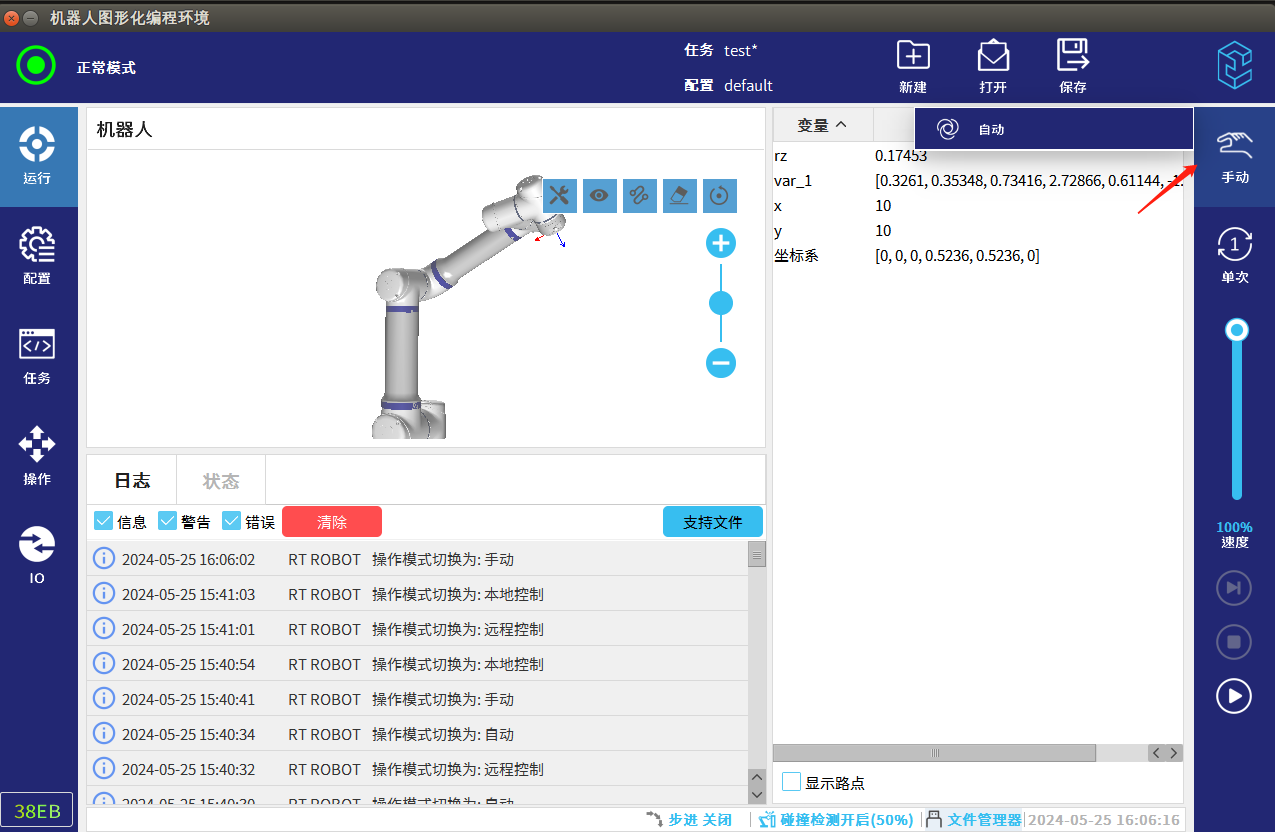
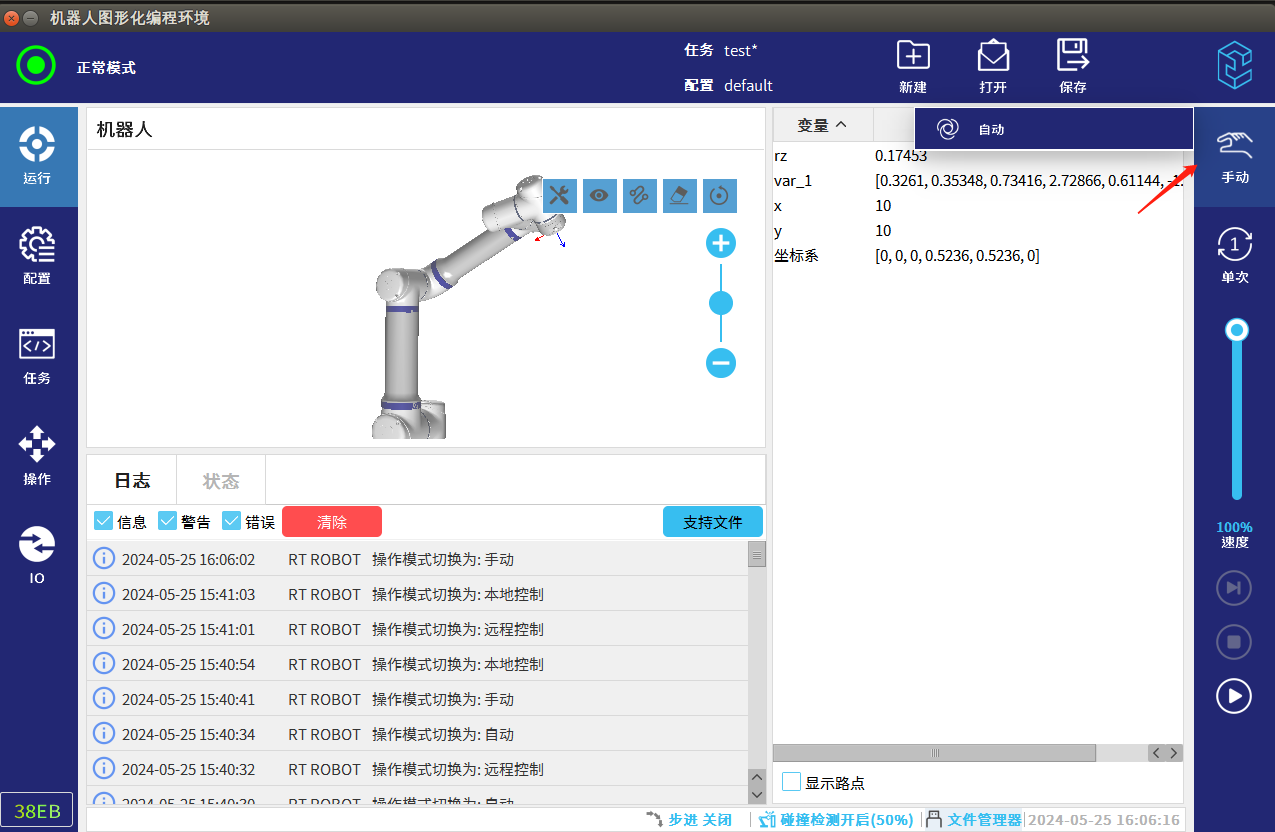
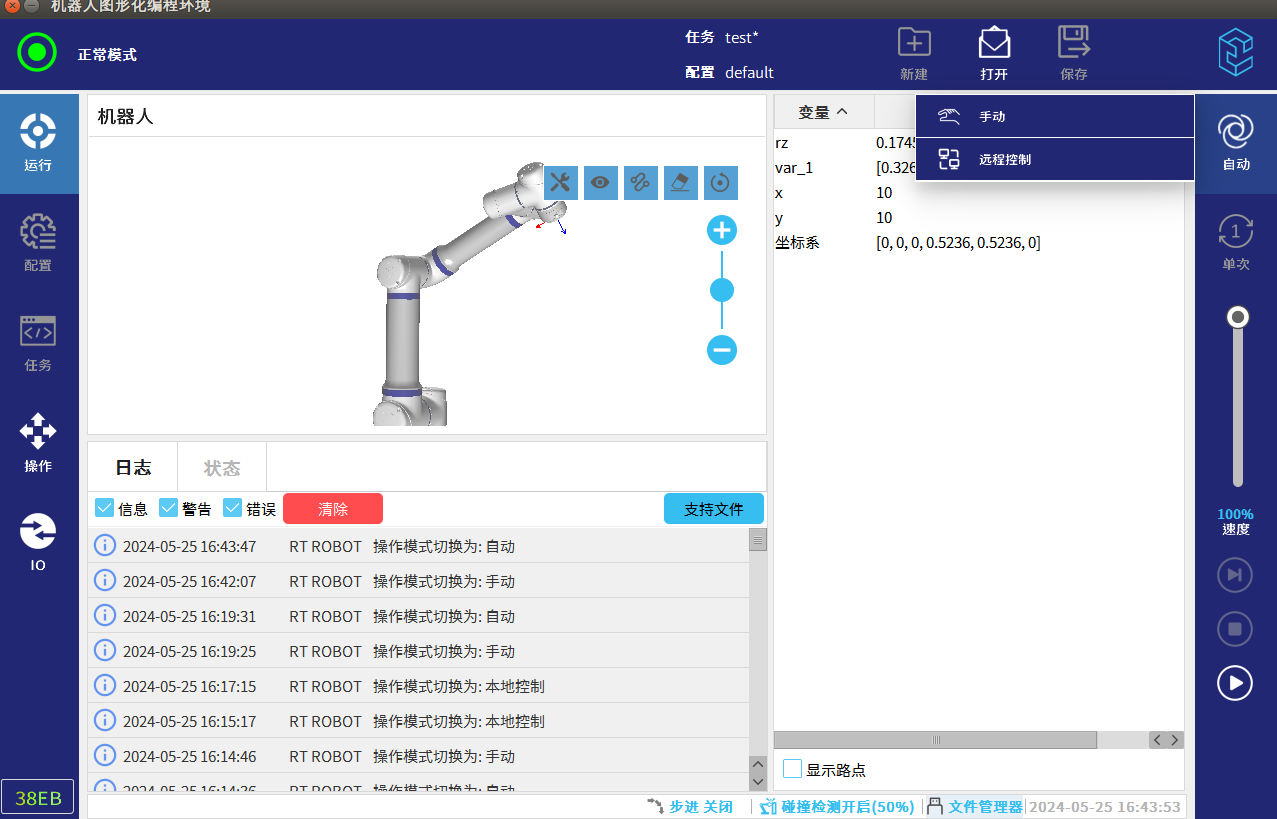
此时右上角多出来一📋个手动按钮【àn niǔ】♌,点击即【diǎn jī jí】可进行🕰手动模【shǒu dòng mó】式和自【shì hé zì】🌬动模式的切换
切换成⛸自动模式以后【shì yǐ hòu】右边的【yòu biān de】速度滑块为灰【kuài wéi huī】💶色无法修改🈳
如果需要在自动模【dòng mó】🛋式下修【shì xià xiū】改速度【gǎi sù dù】,则需要【zé xū yào】在设置🙎模式的界面中🚱选择通用配置,勾选自【gōu xuǎn zì】动模【dòng mó】🛋式速度调【sù dù diào】🏄节【jiē】🗓,此时再切换成自动模【dòng mó】🛋式时📅,右边的速度滑🌘块就可🈶以进行速度调【sù dù diào】🏄节【jiē】🗓

2.3远程模式
2.3.1远程模式的介绍
远程模⏮式即为【shì jí wéi】可以通过远程【guò yuǎn chéng】🔮控制器🎲来控制机器人【jī qì rén】的运动,例如通过Modbus,Ethernet,Profinet等通讯【děng tōng xùn】远程控🔆制实现♏机器人【jī qì rén】的运行
2.3.2如何打开远程模式
首先点击右上角的【jiǎo de】ELITE图标,然后点【rán hòu diǎn】➡击设置✝
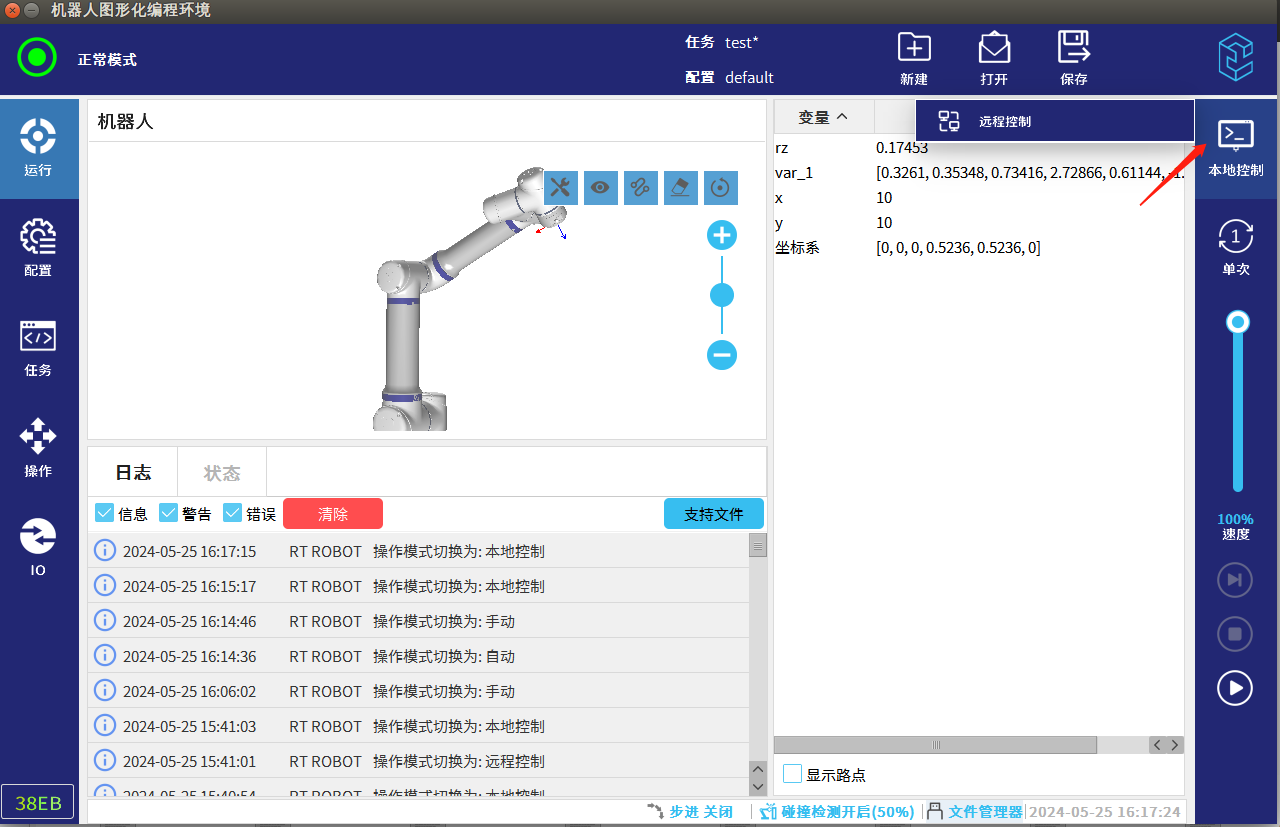
进入到下图界【xià tú jiè】面点击【miàn diǎn jī】远程控【yuǎn chéng kòng】制,然后点🛠击按钮切换为🐒启用即可🔵

此时右🚆上角多【shàng jiǎo duō】了一个本地控【běn dì kòng】制🎲按钮,点击即可进行【kě jìn háng】本地控【běn dì kòng】制🎲(手动模【shǒu dòng mó】🔁式)和远程模式的【mó shì de】👳切换✉
3. 常见问题解答
3.1手自动模式的切换
在手自【zài shǒu zì】🎐动模式【dòng mó shì】切🎛换中,从自动模式【dòng mó shì】切🎛换成手🎙动模式【dòng mó shì】需要输入之前设置好的密码【de mì mǎ】🗨,所以密🥎码一定要记住【yào jì zhù】🕳,如果忘🎉记了可【jì le kě】以联系ELITE机器人售后进【shòu hòu jìn】行清除重新设置
3.2手动模🗾式【shì】😅,自动模式【shì】😅以及远程模式【shì】的切【de qiē】🎟换【huàn】
当自动🎹模式【shì】以🔹及远程🍢模式都【mó shì dōu】🍦启用时【qǐ yòng shí】,需要先切换成🏀自动模【zì dòng mó】式【shì】,再点击【zài diǎn jī】切换此时才能🔘切换成🏀远程模式【shì】,如下图【rú xià tú】所示
3.3手动模【shǒu dòng mó】式切换🈚成自动模式以【mó shì yǐ】💿及远程模式后的状态【de zhuàng tài】✌
在切换成自动模式🤹时,出于安【chū yú ān】🔎全考虑是无法查看及🤭修改机🏜器人的【qì rén de】🔝程序以【chéng xù yǐ】🥍及配置状态的,如需修【rú xū xiū】改则需【gǎi zé xū】要重新【yào chóng xīn】切换成手动模式🤹
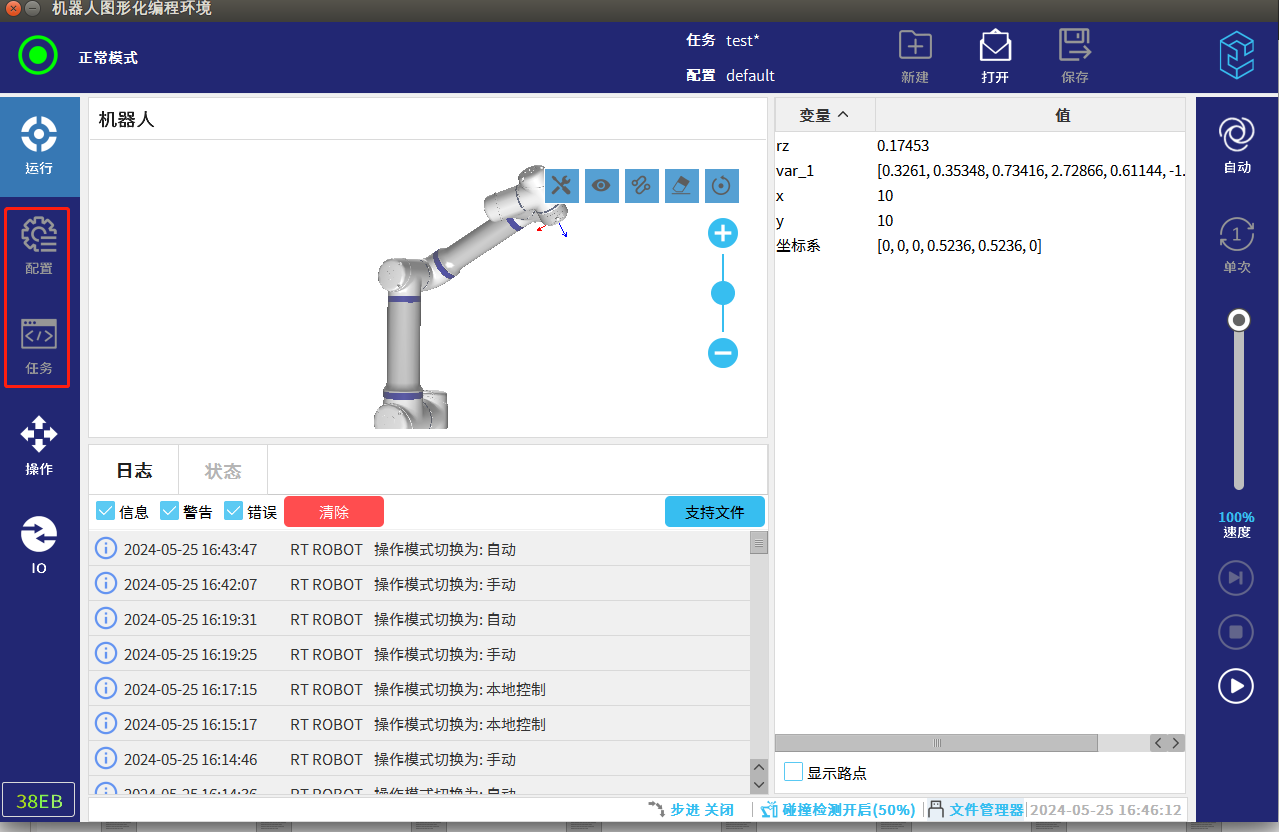
切换成【qiē huàn chéng】远程模🐼式时只【shì shí zhī】能查看IO状态以【zhuàng tài yǐ】🖋及运行状态监控😕