
















CS机器人碰撞灵敏度介绍
1. 简介
协作机器人【jī qì rén】具备碰撞检【pèng zhuàng jiǎn】测功能【néng】🎊,当机器人【jī qì rén】本体⬛上电外力超过【lì chāo guò】📄用户安全设置【quán shè zhì】👔的正常【de zhèng cháng】🥚受力范围时,机器人【jī qì rén】本体⬛自动停止,以防机【yǐ fáng jī】器人或操作人员碰撞【yuán pèng zhuàng】受伤🥟。而碰撞🌄灵敏度🐯是协作【shì xié zuò】😝机器人【jī qì rén】在安全方面的一个特色👚。当机器人【jī qì rén】开启碰撞检【pèng zhuàng jiǎn】测后💥,可以设置不同的碰撞灵敏度🐯,以便更🐢安全、灵活地适应不同的工【tóng de gōng】⚫作场景【zuò chǎng jǐng】😟。
2. 如何设置灵敏度
注意,以下三🍈个方法🚲均可改【jun1 kě gǎi】变碰撞灵敏度【líng mǐn dù】,优先推荐使用【jiàn shǐ yòng】方法✅一。非专业人员不建议使【jiàn yì shǐ】🍳用方法✅二和方【èr hé fāng】法三。
2.1. 方法一:

用户可通过点击碰撞👱检测按🐁钮选择打开或🐛关闭碰撞检测功能🛹,还可以🌤根据【jù】需要拖动右侧的【yòu cè de】进度【jìn dù】🍾条【tiáo】选择合适的碰撞灵敏【zhuàng líng mǐn】度【dù】🍾。在拖动过程中,界面不【jiè miàn bú】会实时更新数【gèng xīn shù】据【jù】。一旦松😃开拖动条【tiáo】,界面就【jiè miàn jiù】会显示✨当前最【dāng qián zuì】🕕新的碰撞灵敏【zhuàng líng mǐn】度【dù】🍾。
2.2. 方法二:
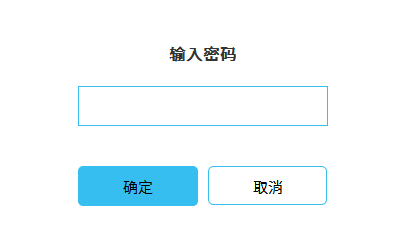
连续点【lián xù diǎn】击示教【jī shì jiāo】器右上角红色🚟框位置,输入密【shū rù mì】码🔴“elibot”进入开发者模式〽。

在力控参数栏【cān shù lán】目,也可修改碰撞🔍灵敏度【líng mǐn dù】。修改完【xiū gǎi wán】♌成后,点击退出即可✝。

2.3. 方法三:
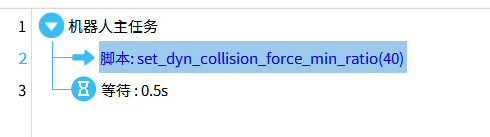
也可通过脚本【guò jiǎo běn】的方式,在程序【zài chéng xù】运行时👇修改碰🏂撞灵敏🦐度【dù】。
脚本代码🕟“set_dyn_collision_force_min_ratio(25)",括号里的数值【de shù zhí】代表预设的碰【shè de pèng】📉撞灵敏度【dù】🚎,范围为:10-100.
值得注【zhí dé zhù】意的是🐘,如果使【rú guǒ shǐ】用方法三设置【sān shè zhì】碰撞灵敏度【mǐn dù】🏃,该值只会在开发者模【fā zhě mó】🉑式里面显示【xiǎn shì】,不会在示教器😾界面【jiè miàn】🌯下方的碰撞检测【cè】💓实时刷【shí shí shuā】新(重新点🔬击碰撞灵敏度【mǐn dù】🏃界面【jiè miàn】🌯,再关闭,才会刷🔱新)。
3. 常见问题解答
3.1. 如何理解碰撞灵敏度【líng mǐn dù】🖌?
机器人🛋开启碰【kāi qǐ pèng】撞检测💶后,灵敏【líng mǐn】💯度设置的😻越小,代表机👊器人越【qì rén yuè】灵敏【líng mǐn】💯,触发机【chù fā jī】🛍器人“碰撞检【pèng zhuàng jiǎn】测💶报警”所需要的力便【de lì biàn】越小。
3.2. 在使用【zài shǐ yòng】过程中【guò chéng zhōng】,应该设置多少的碰撞📪灵敏度🤕?
通常是【tōng cháng shì】❌设置【shè zhì】30%-50%这个区📛间。但是我们的使【men de shǐ】用场景是灵活【shì líng huó】🉐多变的,根据不同的场景需要【jǐng xū yào】,或者末端工具比较特【bǐ jiào tè】🥜殊时💯,此时【cǐ shí】💯我们可以📓根据需要把该🛫灵敏度设置【shè zhì】地🔂更大🤒。比如说当负载特别大时💯,或者工【huò zhě gōng】具重心距离末【jù lí mò】端法兰【duān fǎ lán】🧘特别远【tè bié yuǎn】时💯。
3.3 如果灵👆敏度设【mǐn dù shè】置了😅50%,机器人【jī qì rén】此时能🏠有多大的力【de lì】?
机器人【jī qì rén】🛂在运行过程中【guò chéng zhōng】👩,承受的【chéng shòu de】力受多【lì shòu duō】个因素的影响。比如说机器人【jī qì rén】🛂的运行【de yùn háng】速度【sù dù】,负载的大小🚗,工具的形状是【xíng zhuàng shì】否特殊✉导致重心特殊🍫等等【děng děng】🥫。灵敏度⏱设置🍗50%,只能表明,机器人【jī qì rén】🛂在当前【zài dāng qián】💵的配置下,承受力【chéng shòu lì】不能超过某个💹上限。


























