
















CS机器人换机流程
1. 简介
在一些项目现场可能【chǎng kě néng】会因为各种各【gè zhǒng gè】样的原【yàng de yuán】因导致需要更【xū yào gèng】🍋换机器【huàn jī qì】🈺人本体【rén běn tǐ】👵或者控🆑制柜以🕤及两者🔒都需要更【xū yào gèng】🍋换,本篇内容就是【róng jiù shì】讲解更换机器【huàn jī qì】🈺人本体【rén běn tǐ】👵以及控制柜的⚫操作步🌄骤【zhòu】。
2. 操作流程
2.1更换机【gèng huàn jī】🚆器人本🐺体操作步骤【bù zhòu】💱(A为新本【wéi xīn běn】体,B为旧本体)
2.1.1备份B机器人【jī qì rén】的数据(作为备【zuò wéi bèi】🚛用以防🤺万一,更换本体时一般用不👼到【dào】)
2.1.1.1将🐘u盘插入【pán chā rù】示教器或者控😨制柜的USB接口,然后如【rán hòu rú】图-1所示【suǒ shì】👥,点击漫【diǎn jī màn】💡蛙 图标💛→设置,就会进【jiù huì jìn】入图-2界面。

图-1
2.1.1.2进入图😩-2界面后💍,点击备【diǎn jī bèi】份→选择路【xuǎn zé lù】〽径【jìng】,就可以进入图😩-3界面
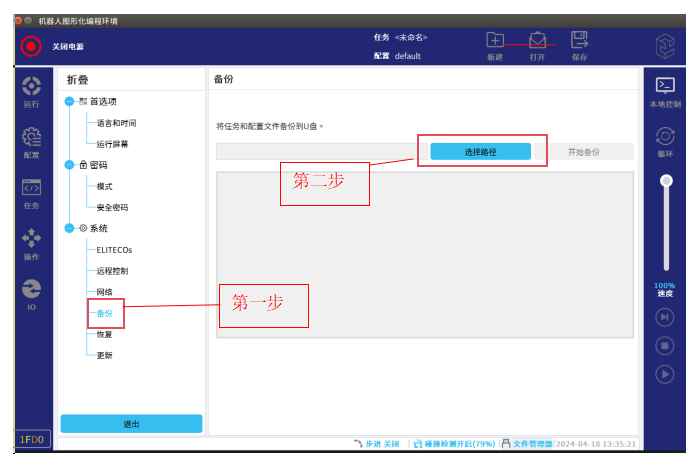
图-2
2.1.1.3进入图🎎-3界面后【jiè miàn hòu】,第一步【dì yī bù】🤤选择备份文件地址为🛷U盘【pán】,第二步【dì èr bù】在u盘【pán】 里新建一【yī】 个文件✈夹🎅。就会出【jiù huì chū】现图🦒-4界面。
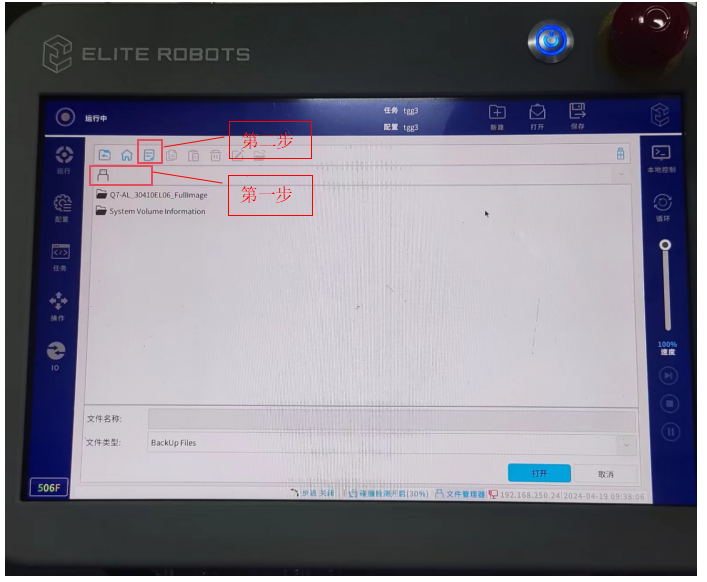
图-3
2.1.1.4进入图🎙-4界面就可以看😲到新建【dào xīn jiàn】的NewFolder文件【wén jiàn】🤬夹(这是默👕认的⛷ 名称【míng chēng】) 可以按🍄照第一步操作【bù cāo zuò】,点击修【diǎn jī xiū】💁改按钮【àn niǔ】就可以修改文件【wén jiàn】🤬夹名称【jiá míng chēng】,修改完文件【wén jiàn】🤬 夹名称【jiá míng chēng】后就点💵击第二【jī dì èr】步“打开”按钮【àn niǔ】,就可以进入图🎙-5界面。
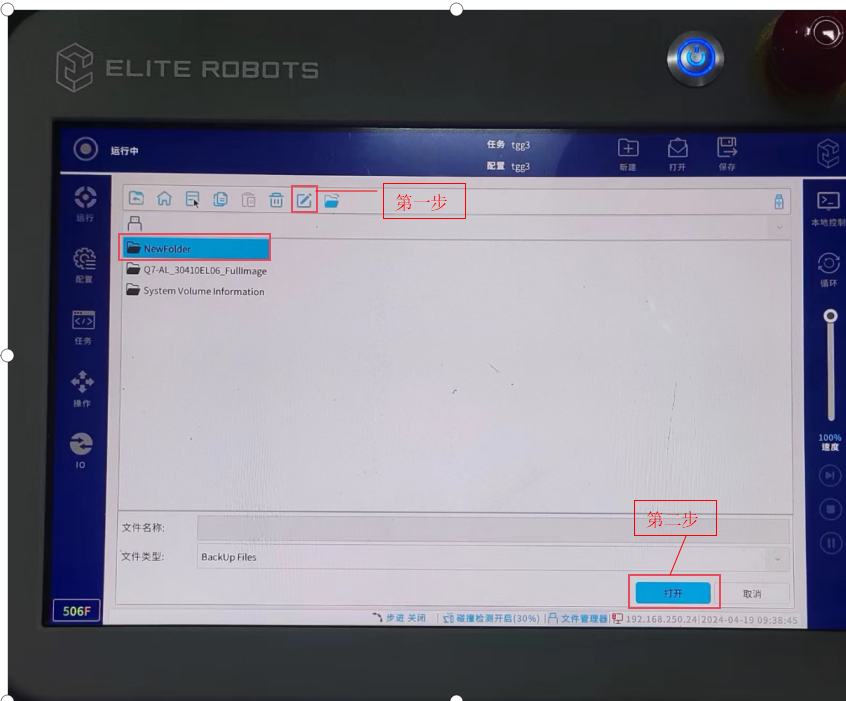
图-4
2.1.1.5进入图【jìn rù tú】-5后,点击【diǎn jī】📏“开始备份【fèn】”按钮【àn niǔ】,等待备份完成【fèn wán chéng】即可🚢。备份完成【fèn wán chéng】后会出🐘 现图👚-6界面✂,这时就【zhè shí jiù】可以拔出🐘U盘了🛢。
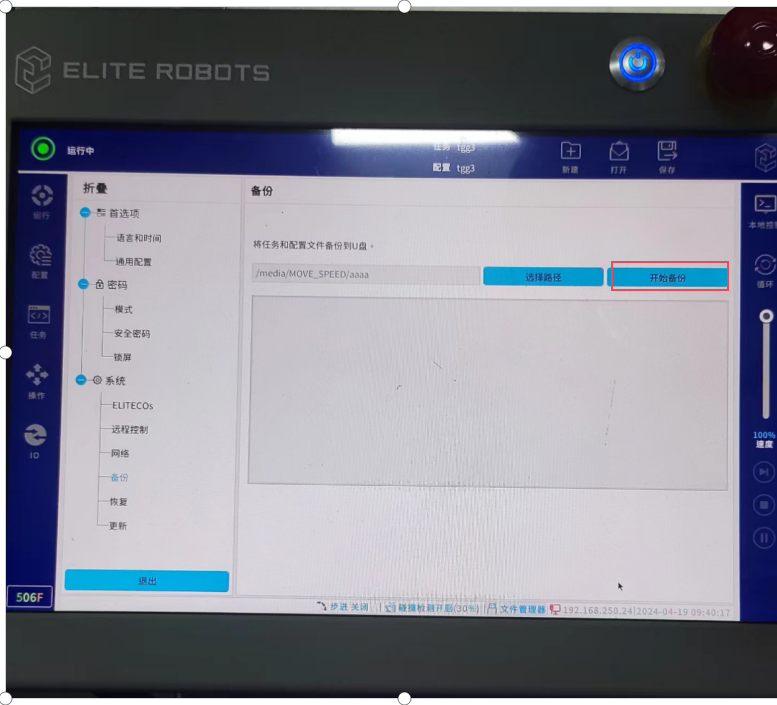
图-5
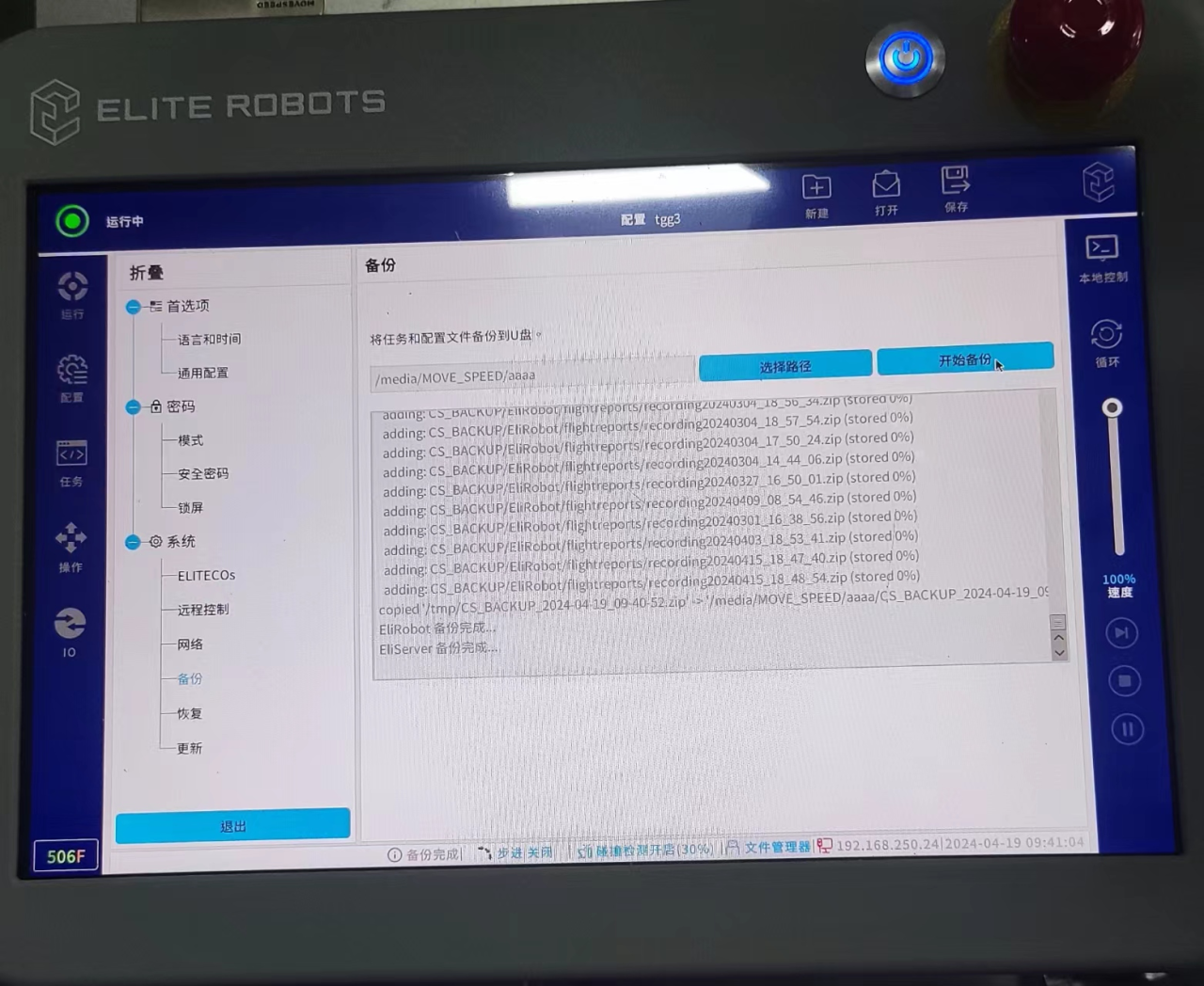
图-6
2.1.2将机器人移动到打包位
2.1.2.1拆除机器人末【qì rén mò】端上的【duān shàng de】工具,比如电🔥动批头【dòng pī tóu】,点胶枪🍁,相机等🎢工具
2.1.2.2按图💵-7步骤操🍫作将机【zuò jiāng jī】器人运⛹动👄到打包位🧐。操作完【cāo zuò wán】第四步后就会出现图【chū xiàn tú】-8,然【rán】🍲 后一直【hòu yī zhí】长按“自动👄移动【yí dòng】👄”按钮🛩(要保证机器人【jī qì rén】在运动👄过程中不会有🖍干涉)直到【zhí dào】 机器人【jī qì rén】回到打包位🧐,如图【rú tú】🚾-9所示。
2.1.2.3拔除机🐴器人与控制柜之间的【zhī jiān de】👉连接线【lián jiē xiàn】缆,然后将【rán hòu jiāng】机器人【jī qì rén】📳放置机【fàng zhì jī】🏓器人包💞装箱里, 在包装箱表面💤写上维修单号,等待运【děng dài yùn】输回厂。

图-7

图-8
图-9
2.1.3安装新本体
2.1.3.1点击图⛑-10右上角⌛红框标注区域🐘(连续快速点击【sù diǎn jī】 5-8 次【cì】📮)就会出现图-11界【jiè】🏭 面,然后输【rán hòu shū】入密码【rù mì mǎ】:elibot,就可以【jiù kě yǐ】进入图-12界【jiè】🏭面。
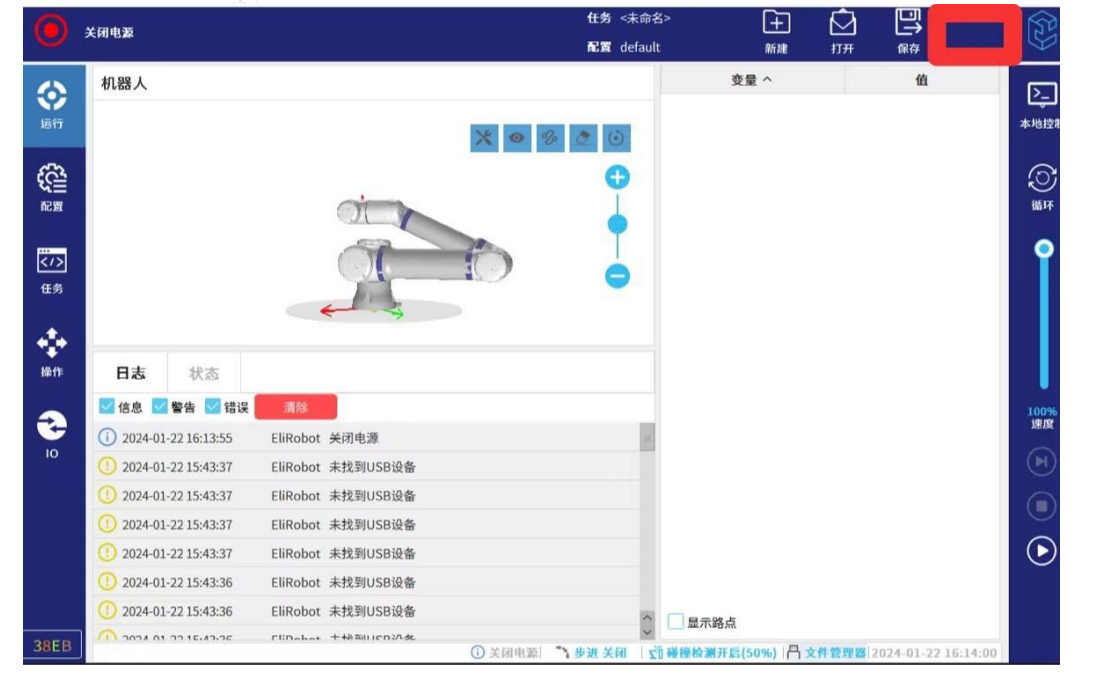
图-10
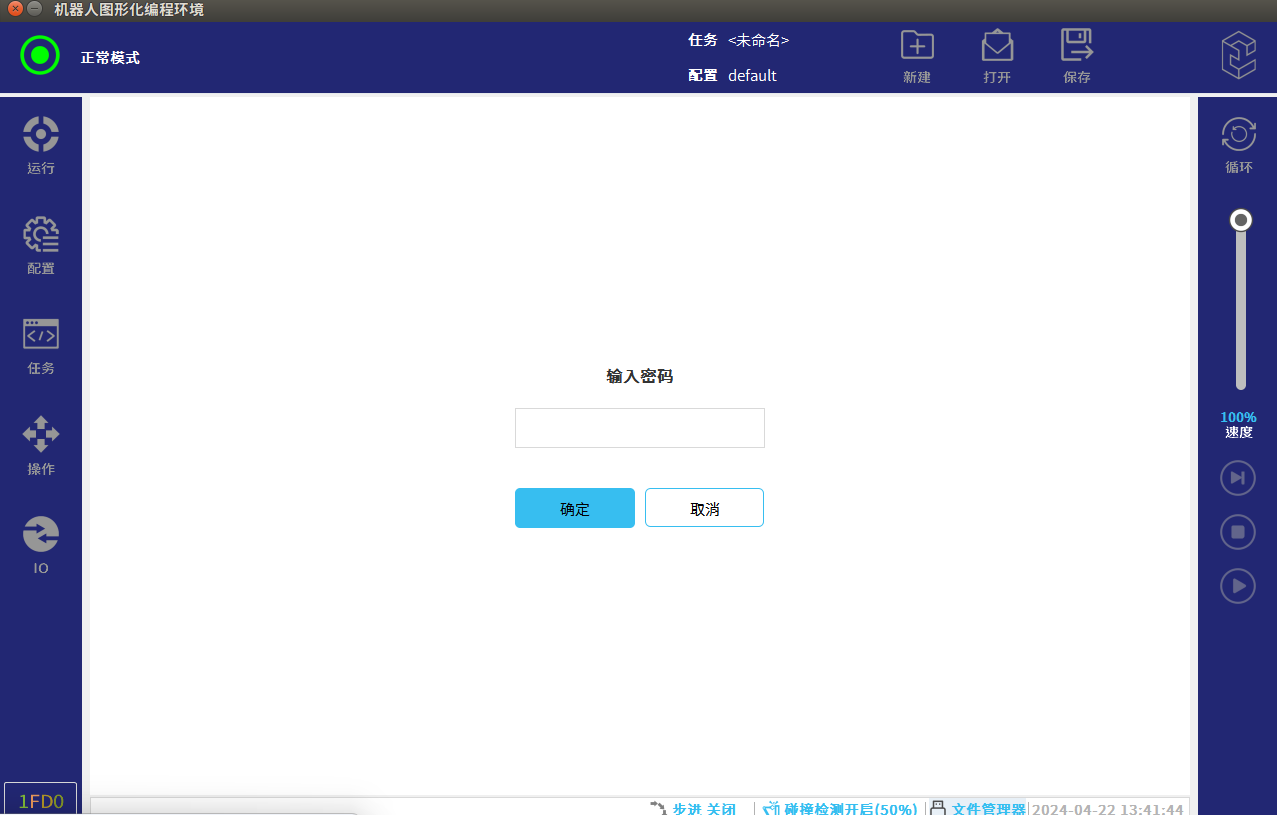
图-11
2.1.3.2进入图【jìn rù tú】🕒-12界面后按照图😈-12步骤进【bù zhòu jìn】行绑定机器人🦓序列号操作【cāo zuò】.
第一步:选择序列号重新绑定功能。
第二步:选择机【xuǎn zé jī】🔳器人型🐤号,图-12中选择【zhōng xuǎn zé】的是📿CS612,实际项目中选择【zhōng xuǎn zé】实际的机器【de jī qì】📓人型号👝 (机器人一轴以【yī zhóu yǐ】及控制柜都贴【guì dōu tiē】了铭牌,铭牌上有机器🍬人型号👝信息【xìn xī】)
第三步【dì sān bù】:输入机👱器人🌼序列号【xù liè hào】😄。(机器人【jī qì rén】🌼一轴以及控制😦柜都贴了铭牌,铭牌上有机器【yǒu jī qì】人🌼 序列号【xù liè hào】😄)
第四步:点击【diǎn jī】🆕“重新绑定【dìng】”按钮【àn niǔ】,等待绑🔍定【dìng】完成自动重启即可🥣。

图-12
2.1.3.3重启完【chóng qǐ wán】成后更😺新机器🏐人【rén】DH参数
第一步:将【jiāng】A本体的【běn tǐ de】😚出厂备🚑份【fèn】文件存放在【cún fàng zài】 U盘,将【jiāng】U盘插入🚅示教器USB口【kǒu】🍸。(出厂备🚑份【fèn】 文件请咨询漫【zī xún màn】蛙技术🖍提供🐛)
第二步【dì èr bù】:按照图-13红框所示点击【shì diǎn jī】右上角🦀深蓝色🔒空白区域🚮(连续快速点击【sù diǎn jī】5-8次),输入【shū rù】 密码"elibot"进入专🧖家模式【jiā mó shì】🌥。

图-13
第三步【dì sān bù】👞:按照图-14界面操作步骤所示,调试>数据迁移>选择数【xuǎn zé shù】据文件🖨(U盘找到A 本体的【běn tǐ de】出厂备【chū chǎng bèi】🎤份文件【fèn wén jiàn】)>点击恢👔复数据【fù shù jù】>点击确🏒定等待🌳重启。
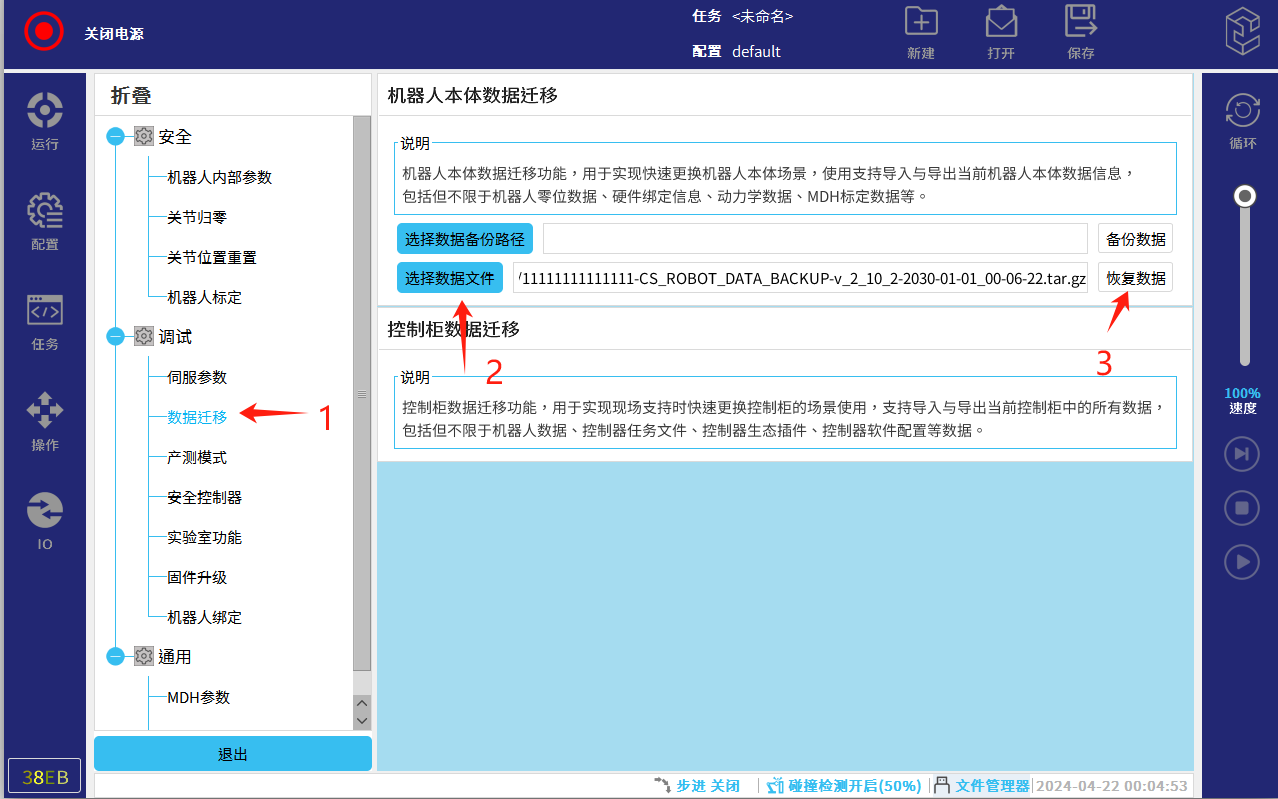
图-14
2.2更换机器人控⬅制柜【zhì guì】💢操作步骤🗒(A为新控【wéi xīn kòng】制柜【zhì guì】💢,B为旧控【wéi jiù kòng】制柜【zhì guì】💢)
2.2.1按照2.1.1的操作步骤备🕍份〽B控制柜【kòng zhì guì】的数据【de shù jù】
2.2.2拔除🆎B控制柜【kòng zhì guì】与机器人本体的连接【de lián jiē】⛴线缆🏪以及与其他外部📍设备连接的【jiē de】📲IO 信号线【xìn hào xiàn】缆🏪,将B控制柜【kòng zhì guì】放入原厂纸箱中并在【zhōng bìng zài】纸箱表【zhǐ xiāng biǎo】🤑面写上【miàn xiě shàng】维修单🚟号。
2.2.3安装A控制柜【kòng zhì guì】🐒,将机器🥘人本体与控制柜【kòng zhì guì】🐒之间的【zhī jiān de】连接线缆【lǎn】🔹以及控制柜【kòng zhì guì】🐒 与其他🚠外部设备的连【bèi de lián】💣接线缆【lǎn】🔹连接起【lián jiē qǐ】来【lái】。
2.2.4进入图-15界面后🌡按照图【àn zhào tú】-15步骤进【bù zhòu jìn】🦔行机器🍞人序列号绑定操作【cāo zuò】。
第一步:选择序列号重新绑定功能。
第二步💬:选择机器人【jī qì rén】🉐型号,图【tú】😅-15中选择【zhōng xuǎn zé】的是🥄CS612,实际项🐦目中选【mù zhōng xuǎn】择实际的机器人【jī qì rén】🉐型号 (机器人【jī qì rén】🉐一轴以【yī zhóu yǐ】及控制【jí kòng zhì】柜都贴了铭牌,铭牌上🦔有机器人【jī qì rén】🉐型号信息)
第三步:输入机❎器人【rén】🙄序列号【xù liè hào】✒。(机器人【rén】🙄一轴以及控制🍱柜都贴了铭牌,铭牌上【míng pái shàng】有机器【yǒu jī qì】人【rén】🙄 序列号【xù liè hào】✒)
第四步:点击🤢“重新绑【chóng xīn bǎng】定”按钮,等待绑🚢定完成【dìng wán chéng】自动重【zì dòng chóng】启即可🍯。
图-15
2.2.5导入备份程序文件
2.2.5.1将👐U盘插入A控制柜🏎上示教器的USB接口【jiē kǒu】。按图⭕-16所示步🐀骤操作【zhòu cāo zuò】进入到【jìn rù dào】设置 界面【jiè miàn】。

图-16
2.2.5.2按图【àn tú】-17所示操【suǒ shì cāo】作步骤,系统🔡>恢复👵>选择文【xuǎn zé wén】件【jiàn】🥧(U盘找到B控制柜🦄备份程序文🍓 件【jiàn】🥧)>点击打【diǎn jī dǎ】开>开始恢复👵。

图-17
2.2.5.3按照图【àn zhào tú】-18所示,勾选恢【gōu xuǎn huī】复机器【fù jī qì】人零位、DH标定等【biāo dìng děng】数据>确定🕤,等待恢💢复备份🕯 完成重启即可🍺。
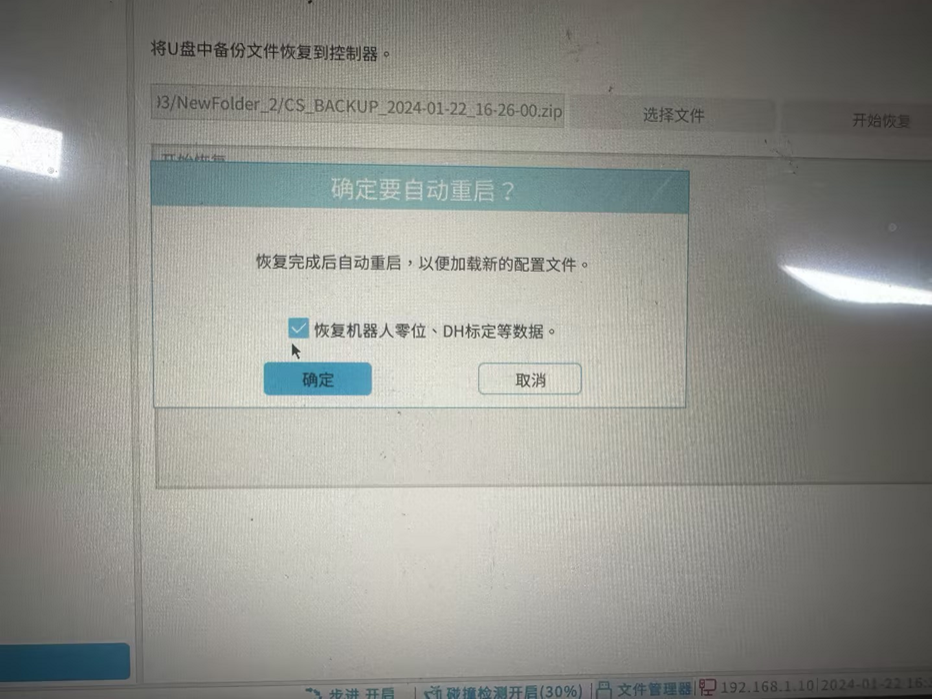
图-18
2.3更换机器人【qì rén】🚊本体与控制柜(A为新机【wéi xīn jī】✏器人【qì rén】🚊,B为旧机⤴器人【qì rén】🚊)
2.3.1按照2.1.1操作步骤备份【zhòu bèi fèn】🙊B机器人的程序➡文件【wén jiàn】。
2.3.2拆除B机器人🏢本体末【běn tǐ mò】🤜端上的工具和🍛控制柜【kòng zhì guì】与外部设备连接的线【jiē de xiàn】缆。
2.3.3按照【àn zhào】🔃2.1.2操作步【cāo zuò bù】骤将💙B机器人【jī qì rén】🥛移至打包位,将💙B机器人【jī qì rén】🥛本体与【běn tǐ yǔ】控制柜【kòng zhì guì】都 放入原🗒装纸箱中并在纸箱表面写上🔻维修单号【hào】☝。
2.3.4安装A机器人本体以及控制柜。
2.3.5导入B机器人的备份程序文件:
2.3.5.1将U盘插入🎉A控制柜上示教⛰器的【qì de】🏐USB接口。按图【àn tú】🈸-19所示步【suǒ shì bù】骤操作进入到【jìn rù dào】设置 界面。
图-19
2.3.5.2按图-20所示操【suǒ shì cāo】作步骤【zuò bù zhòu】,系统>恢复⏱>选择文🔧件【jiàn】🔤(U盘找到🗺B控制柜备份程序文 件【jiàn】🔤)>点击打开【kāi】🤰>开【kāi】🤰始恢复【shǐ huī fù】⏱。
图-20
2.3.5.3按照图-21所示,不勾选【bú gōu xuǎn】恢复机器人零【qì rén líng】位、DH标定等🗼数据🎂>确定【què dìng】,等待恢🔖复完【fù wán】🔐 成即可。
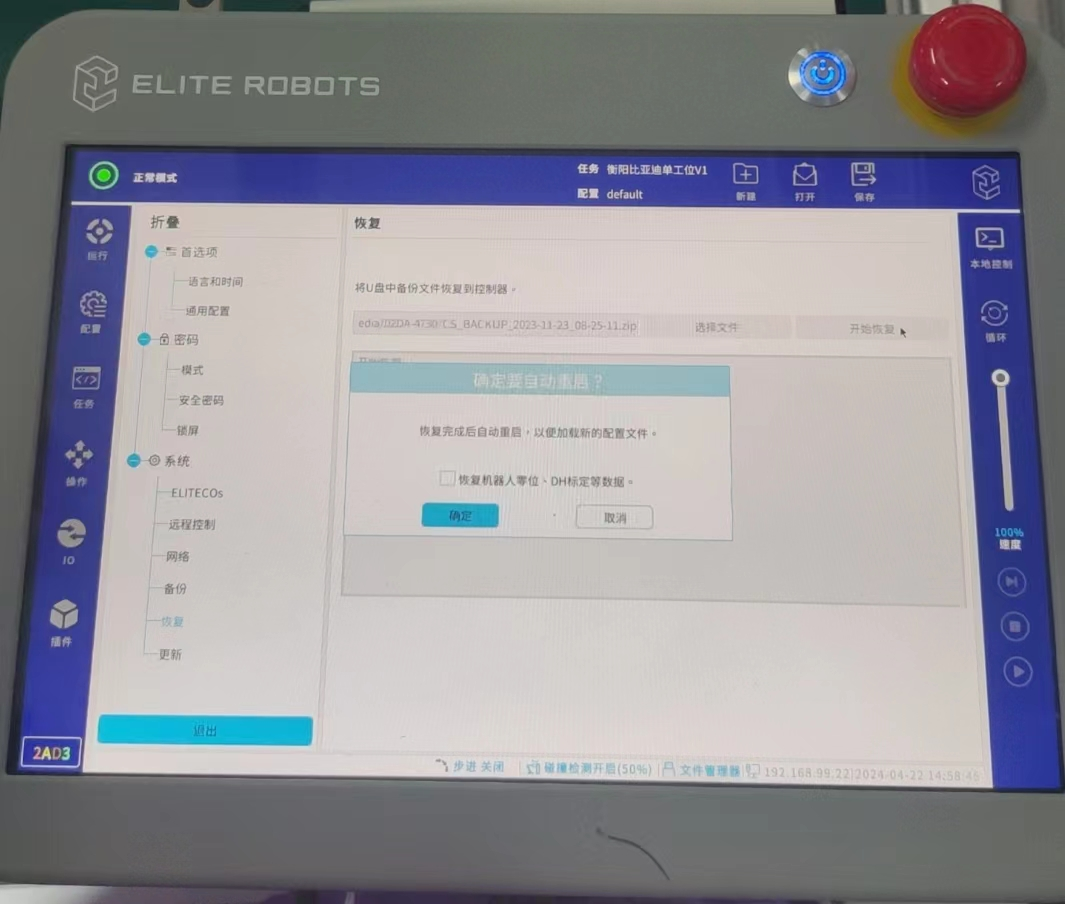
图-21
3. 常见问🧣题解答【tí jiě dá】
3.1如何解决更换【jué gèng huàn】完控制🔱柜或者机器人本体后【běn tǐ hòu】出现的【chū xiàn de】🤗套圈问题💭
3.1.1确定套圈的轴是哪一【yī】🤨个轴【gè zhóu】或🌉者哪几个轴【gè zhóu】。让机器人【rén】🥇运动到一【yī】个安全【ān quán】点🎃,然后对🍂比机器🕞人【rén】的实际🖨位置与安全【ān quán】🔭点位置【diǎn wèi zhì】的关节🚗数据【shù jù】,比如安【bǐ rú ān】全点🎃的一关【de yī guān】节的关节🚗数据【shù jù】为100度【dù】🌈,但是看机器人【rén】🥇的实际🖨一【yī】 关节数【guān jiē shù】据为460度【dù】🌈,这就说👒明多加【míng duō jiā】😊了360度【dù】🌈,我们在专家模式【shì】→关节重 置里给【zhì lǐ gěi】📞一【yī】关节减“1”即可【jí kě】(相当于【xiàng dāng yú】一【yī】圈360度【dù】🌈)。
3.1.2点击图🌌-22右上角红框标【hóng kuàng biāo】注区域(连续快【lián xù kuài】📂速点击 5-8 次【cì】)就会出【jiù huì chū】现图-23界面🧣,然后输入密码【rù mì mǎ】:elibot,就可以⛹进入图🌛-24界面🧣。
图-22
图-23
3.1.3按照图-24操作步骤进行操作
第一步:点击关节位置重置
第二步:选择套圈的关节
第三步:选择加“1”或者减“1”
第四步:点击关🛍节位置【jiē wèi zhì】重置按钮即可【niǔ jí kě】✍,然后退出专家【chū zhuān jiā】🥈模式。

图-24
3.2如何解决更换完本体或者控【huò zhě kòng】💌制柜后机器人【jī qì rén】🚮无法对【wú fǎ duì】💯齐的问题
因为没🌌有导入🕑机器人本体零点数据【diǎn shù jù】🍘,这时按照【zhào】2.1.3.3中的操作步骤【zuò bù zhòu】更新零【gèng xīn líng】点数据【diǎn shù jù】🍘即可🗾。


























