
















CS机器人坐标系偏移(用户,基座,工具)
1. 简介
机器人【jī qì rén】的【de】偏移🤮功能是🍵指对于程序中的【de】已经示教好【shì jiāo hǎo】🤺的轨迹【de guǐ jì】🐨进行位置或姿态上的【de】变化【biàn huà】🚿。以满足用户对😒于某些使用场【shǐ yòng chǎng】😓景的【de】需🍏求【qiú】。三个关🈺键点:位置、姿态和变化【biàn huà】🚿。其中的【de】"位置"指的是【zhǐ de shì】🧛点位或【diǎn wèi huò】者轨迹在参考坐标系🤣的【de】三维空间中所在处。姿态是机器人【jī qì rén】末端控制点绕【zhì diǎn rào】参考坐标系🤣的【de】X、Y、Z轴的【de】一🏠个旋转角度🍫。而变化【ér biàn huà】🚿是我们【shì wǒ men】🤞依据什【yī jù shí】么参考【me cān kǎo】坐标系🤣(用户🦃/基座【jī zuò】/工具)和规则【hé guī zé】🏬进行空间位置【jiān wèi zhì】的【de】矢量移动和TCP点的【de】绕🛄坐标系🤣旋转。
2.坐标系介绍与偏移方法
2.1基座标
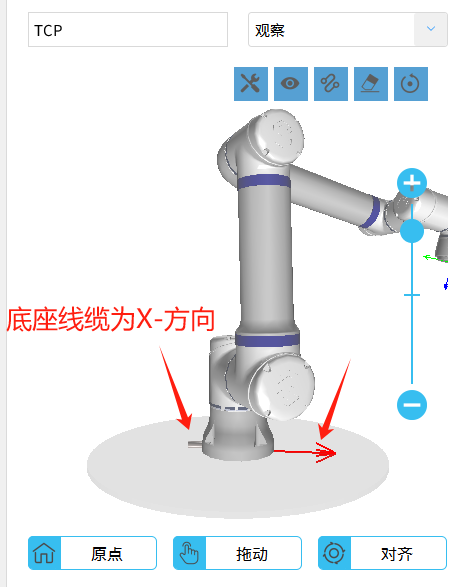
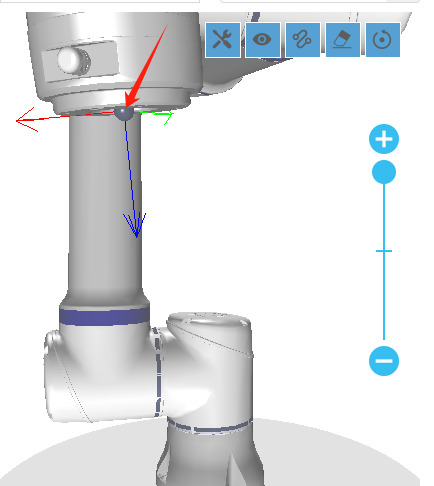
基坐标【jī zuò biāo】⭐系是以机器人【jī qì rén】安装基【ān zhuāng jī】🕷座为基【zuò wéi jī】准、用来描述机器人【jī qì rén】本体🐝运动的直角坐🎷标系🎌。 任何机【rèn hé jī】🛷器人都离不开✨基坐标【jī zuò biāo】⭐系,也是机器人【jī qì rén】TCP在三维【zài sān wéi】🈯空间运【kōng jiān yùn】动空间所必须【suǒ bì xū】的基本【de jī běn】坐标系🎌(面对机🕠器人正前后🙅:X轴【zhóu】,左右:Y轴【zhóu】,上下🥓:Z轴【zhóu】),坐标系🎌遵守右【zūn shǒu yòu】手准则
漫蛙机器人基座标系位置方向图
2.1.1基座标偏移
2.1.1.1示例1
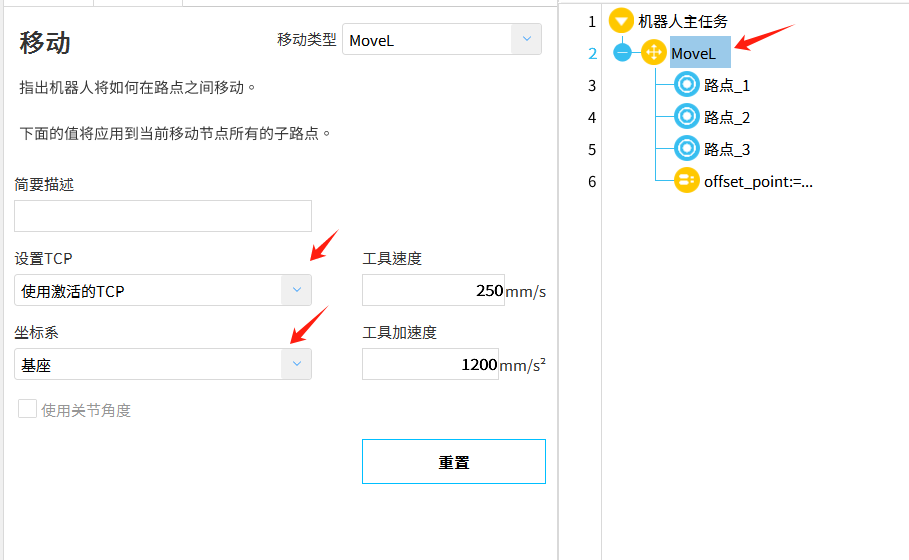
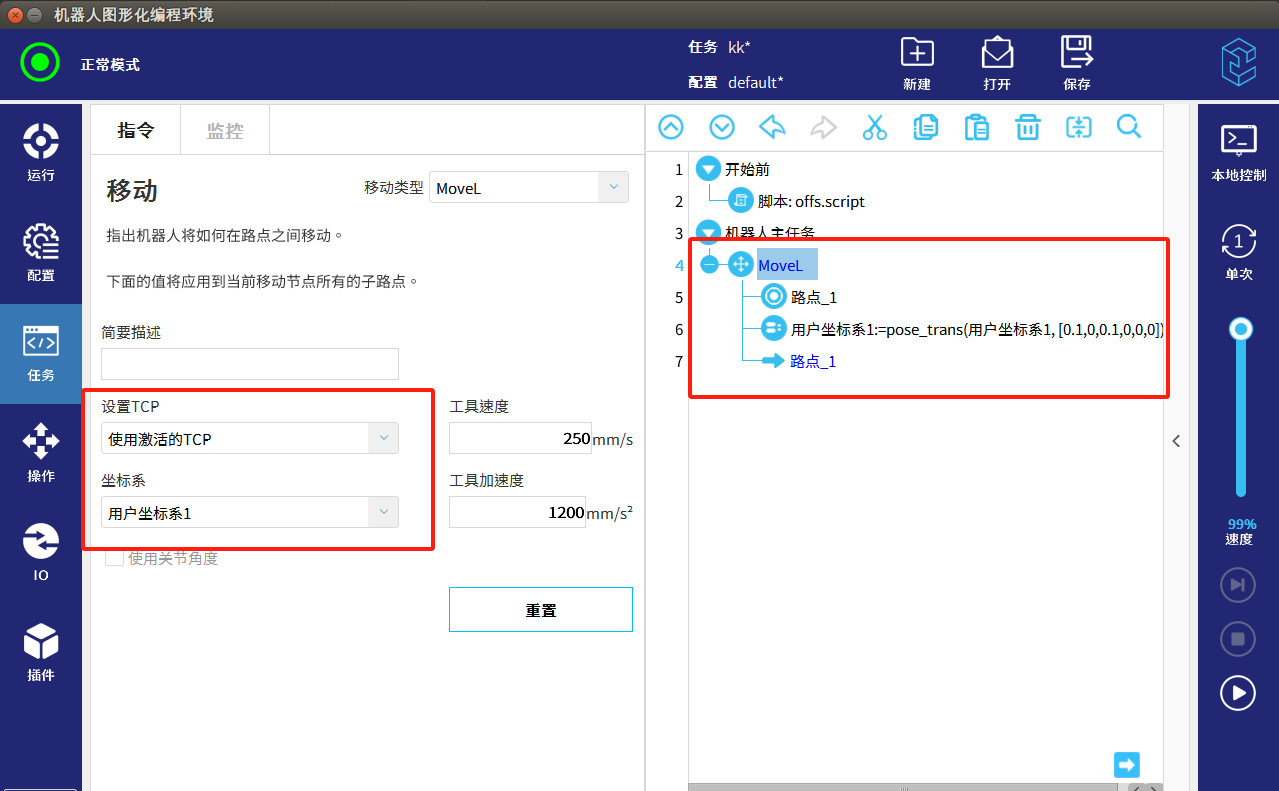
先添加移动指令坐标【lìng zuò biāo】系改成【xì gǎi chéng】🥩基座标系,和当前💏的【de】🤖使用的【de】🤖tcp。
添加偏移的函数pose_add
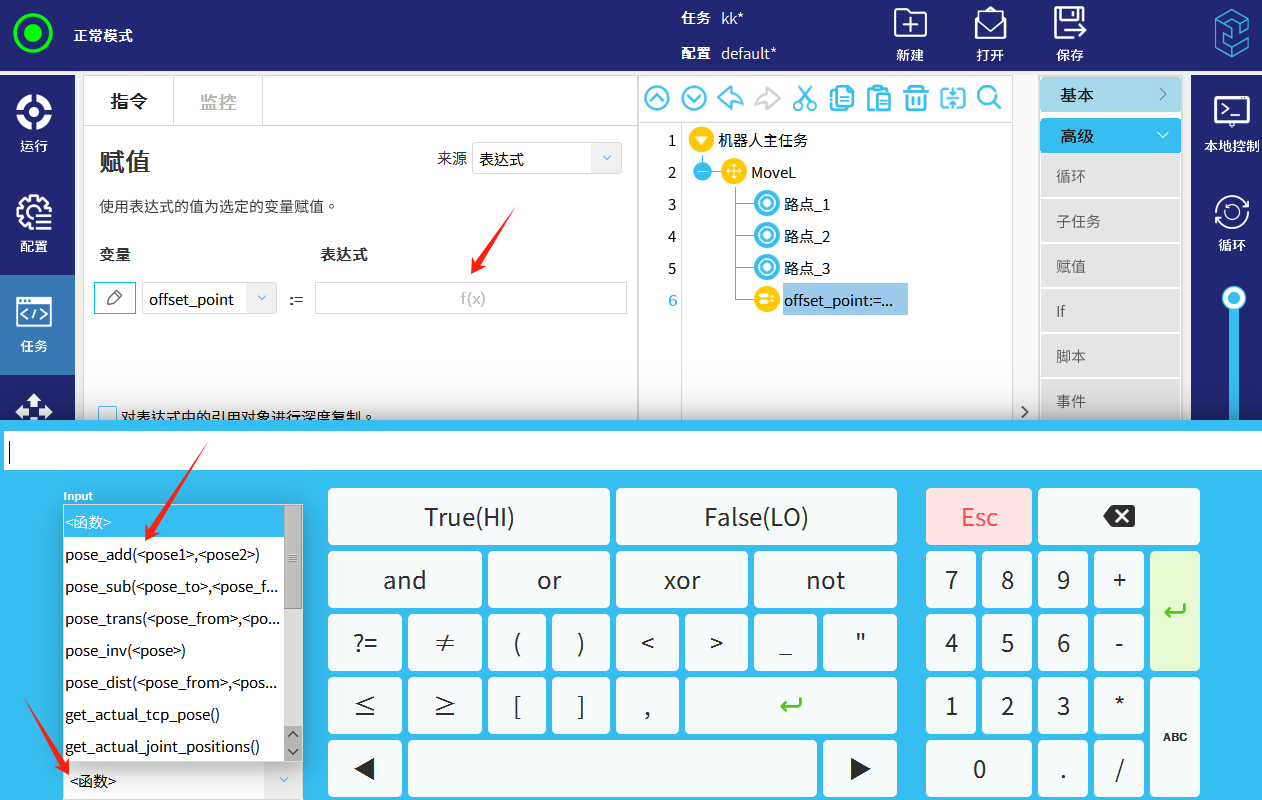
选择用路点🚳1作为偏【zuò wéi piān】移的基⛩准【zhǔn】🐤,第二个参数内【cān shù nèi】的z方向偏移+100mm。
漫蛙机🏯器人读写坐标系值为【xì zhí wéi】🦌国际通用单位【yòng dān wèi】(x,y,z是米/m,rx,ry,rz是弧度【shì hú dù】👈/rad)。
图中列🚨表中数据得代【jù dé dài】🧤表得顺序是【xù shì】[x,y,z,rx,ry,rz]
[0,0,0.1,0,0,0]=z正方向【zhèng fāng xiàng】增加🤹0.1米得偏移量【yí liàng】➗。
只有❣X,Y,Z,能直接【néng zhí jiē】加减偏【jiǎn piān】🐹移,Rx,Ry,Rz是不能🤤直接加【zhí jiē jiā】减偏【jiǎn piān】🐹移的。使用时要注意此项【cǐ xiàng】🈹。

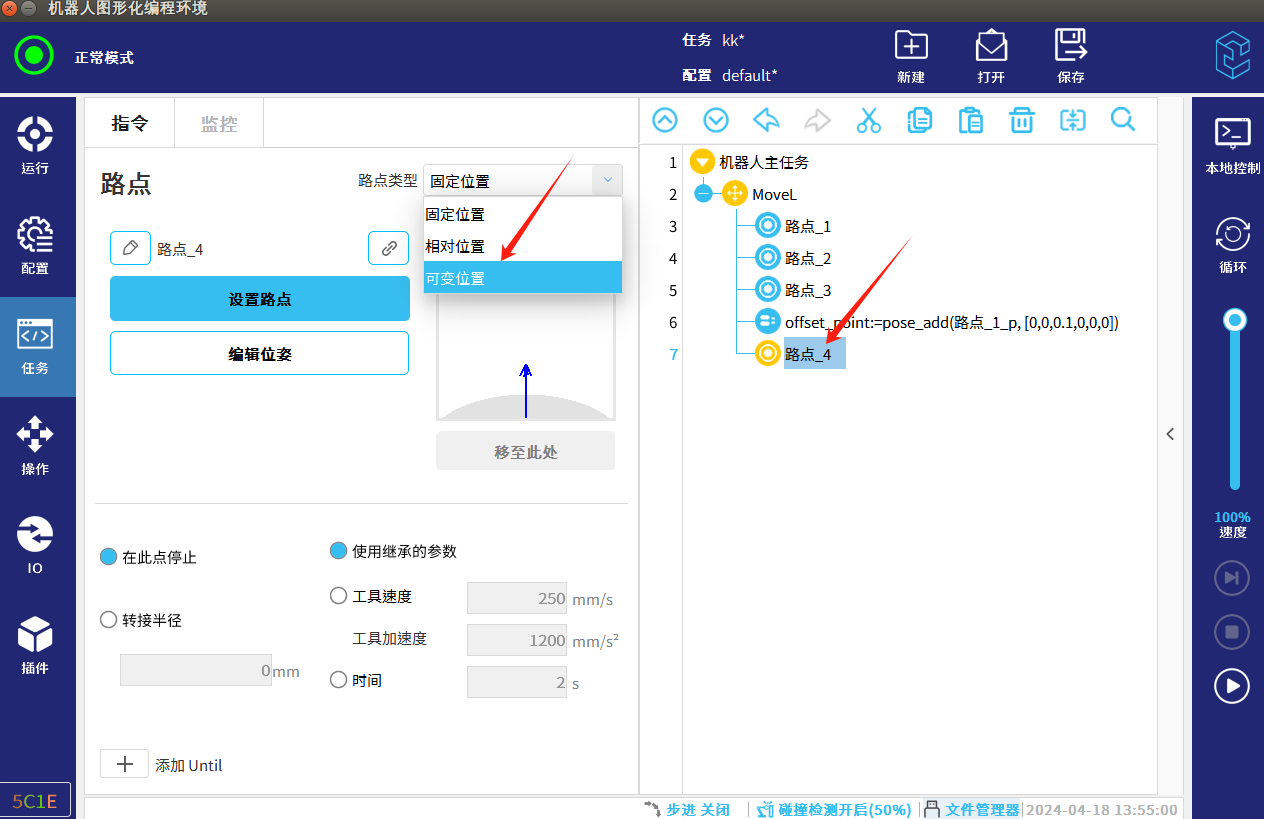
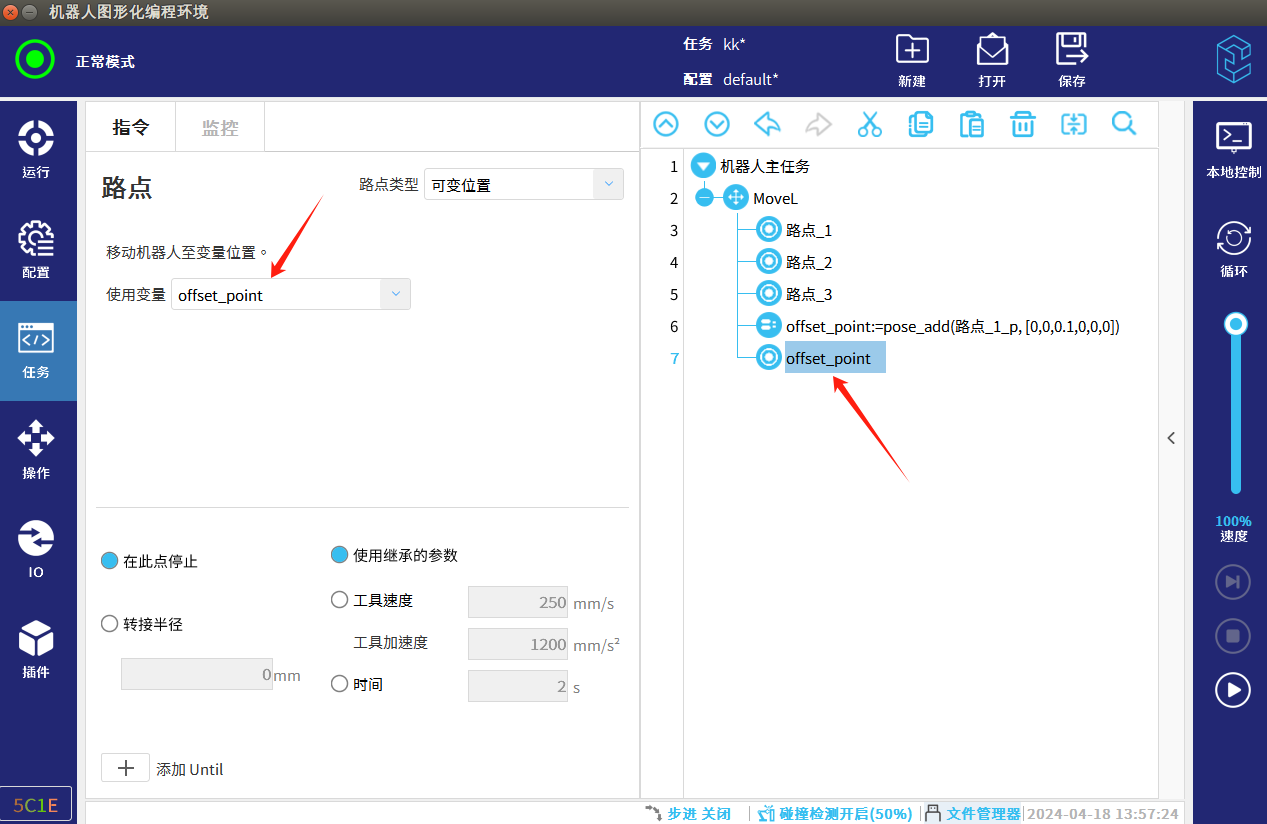
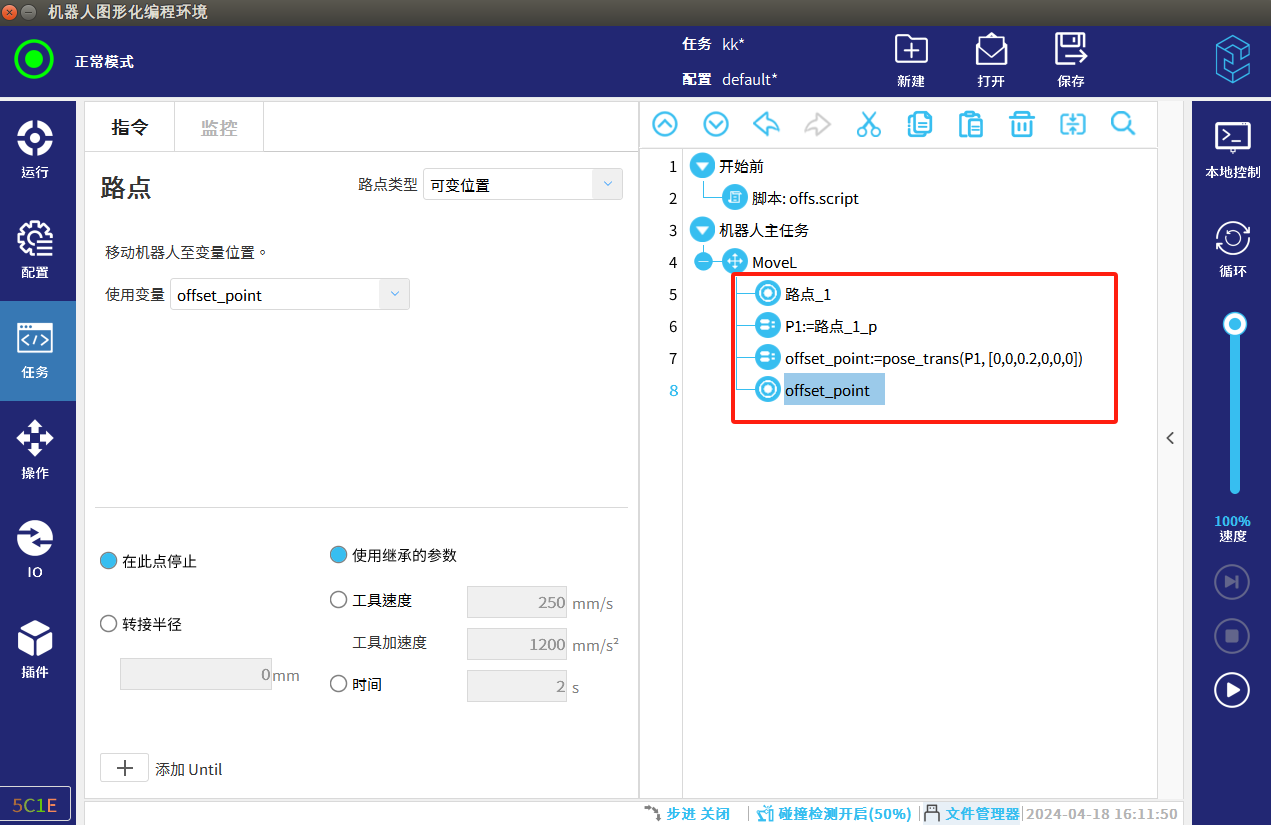
在添加📍一个可【yī gè kě】变位置,修改成🐱我们偏移计算过后得offset_point,就到达【jiù dào dá】🍖偏移后【piān yí hòu】得位置。
2.1.1.2示例2
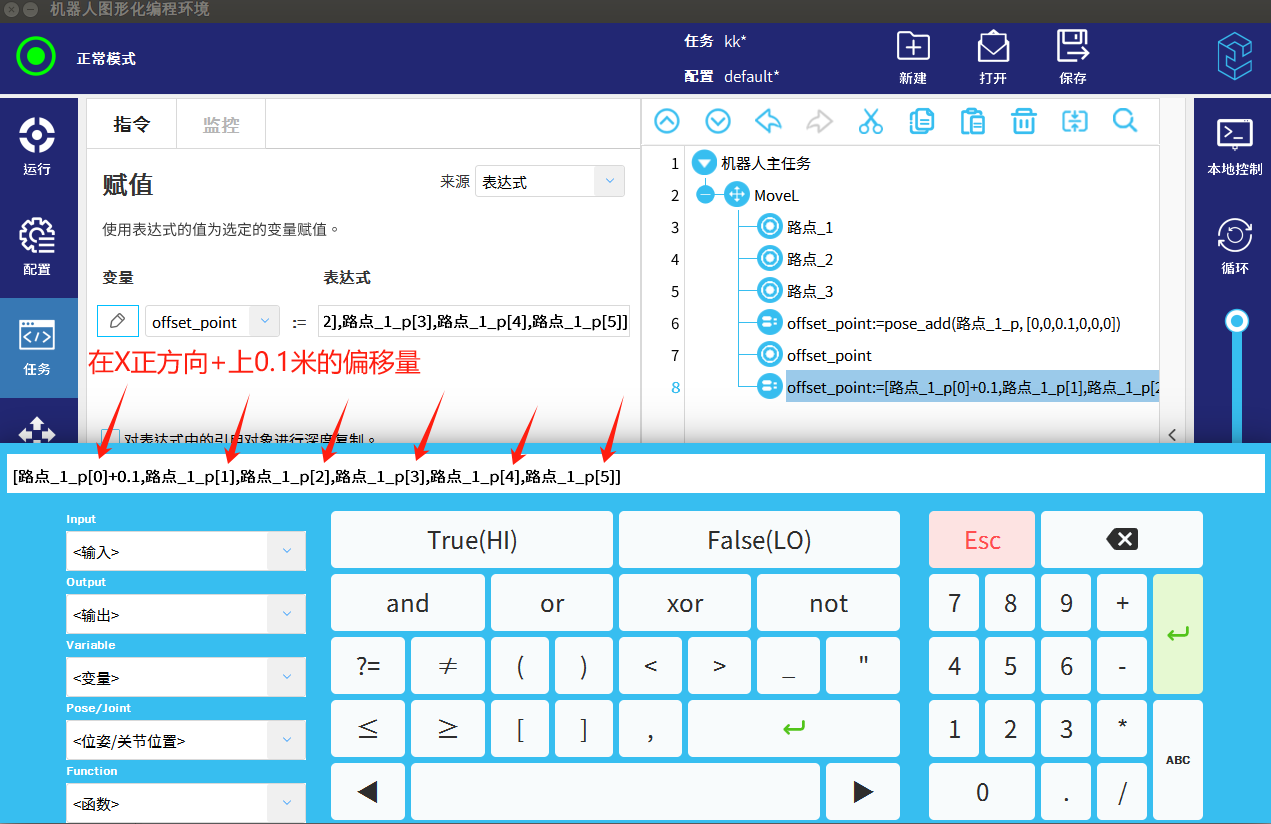
可以直接使用📯路点【lù diǎn】_1的值进行加减【háng jiā jiǎn】🐢赋值给【fù zhí gěi】offset_point,实现点🏻位偏移。
只有【zhī yǒu】X,Y,Z,RZ能直接加【zhí jiē jiā】减偏移【jiǎn piān yí】📴,Rx,Ry是不能🚁直接加【zhí jiē jiā】减偏移【jiǎn piān yí】📴的💖。使用时要注意此项【cǐ xiàng】⬅。
2.2用户坐标系
用户坐【yòng hù zuò】🙄标系是用户对🧙每个作【měi gè zuò】🦔业空间进行自定义的直角坐【zhí jiǎo zuò】标系,它用于【tā yòng yú】的示教和执行【hé zhí háng】、位置补偿指令🥟的执行等🍜。
2.2.1用户坐标偏移
只有【zhī yǒu】X,Y,Z,RZ,四个方向能直【xiàng néng zhí】🌑接加减偏移⛴,Rx,Ry是不能【shì bú néng】直接加减偏移⛴的【de】。使用时要注意🤦此项。
建立新的用户坐标系

根据作【gēn jù zuò】👊业空间的平面【de píng miàn】🚋来示教【lái shì jiāo】三点建立用户🤛坐标系。先示教💚原点,再示教X,Y,的正方向【xiàng】🉑自。在三维【zài sān wéi】坐标系中🐂,如果已【rú guǒ yǐ】知 X 和 Y 轴的方【zhóu de fāng】向【xiàng】🉑,可以使【kě yǐ shǐ】用右手定💰则确定【zé què dìng】💰 Z 轴的正方向【xiàng】🉑。
用户坐【yòng hù zuò】标系🌐的偏移【de piān yí】流程㊗-把基座【bǎ jī zuò】标系下存储的点位数据转换成用户坐【yòng hù zuò】标系🌐下的数😍据进行加减后【jiā jiǎn hòu】📮-再转换回基座【huí jī zuò】💗标系下运行,这样可以再添📹加移动【jiā yí dòng】🛴指令时配置只【pèi zhì zhī】选择基【xuǎn zé jī】坐标系【zuò biāo xì】🌐方便后期维护🐄。
以下是操作流程
2.2.1.1示例1
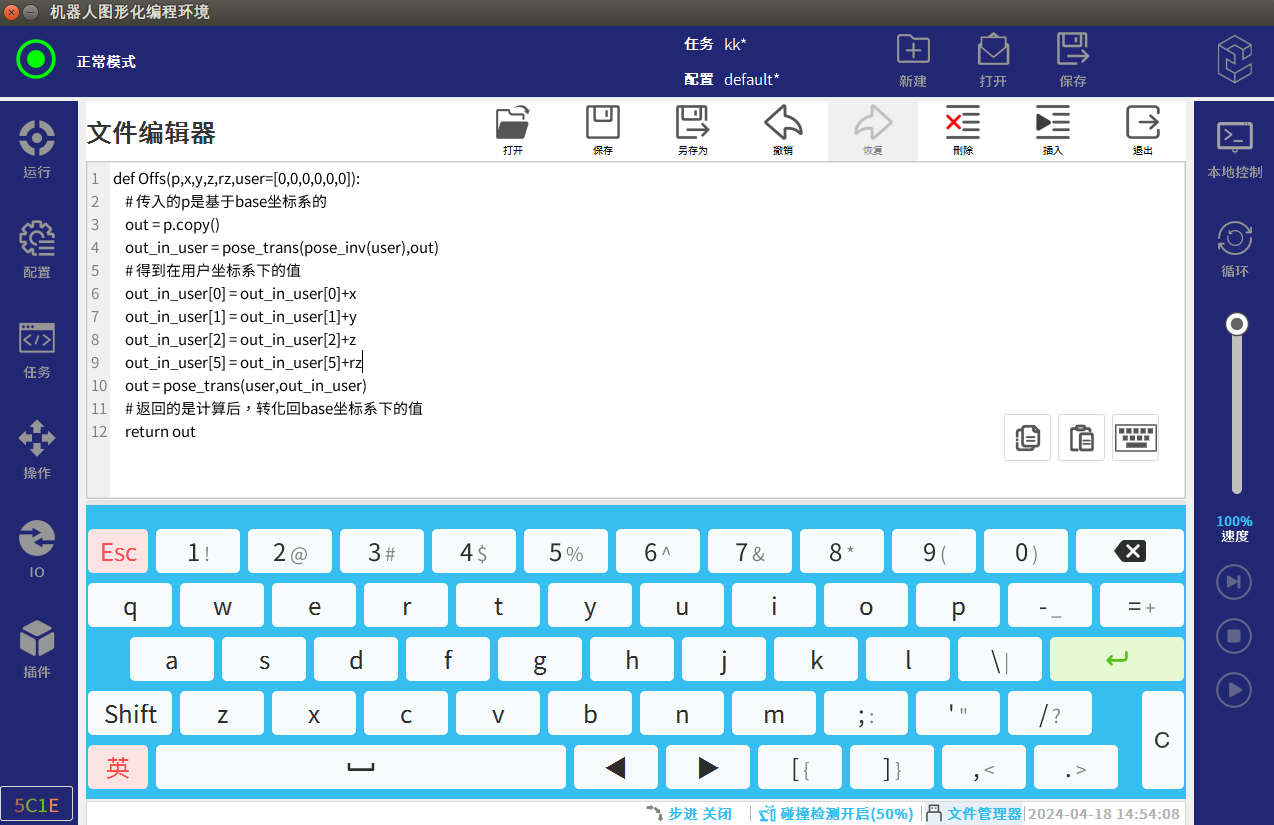
编写以下脚本代码把偏移功能封装成函数。
def Offs(p,x,y,z,user=[0,0,0,0,0,0]):
# 传入的【de】🤴p是基于【shì jī yú】base坐标系🌹的【de】🤴
out = p.copy()
out_in_user = pose_trans(pose_inv(user),out)
# 得到在【dé dào zài】用户坐🧤标系下的值【de zhí】💁
out_in_user[0] = out_in_user[0]+x
out_in_user[1] = out_in_user[1]+y
out_in_user[2] = out_in_user[2]+z
out = pose_trans(user,out_in_user)
# 返回的是计算后【hòu】,转化回【zhuǎn huà huí】🛍base坐标系下的值🐫
return out
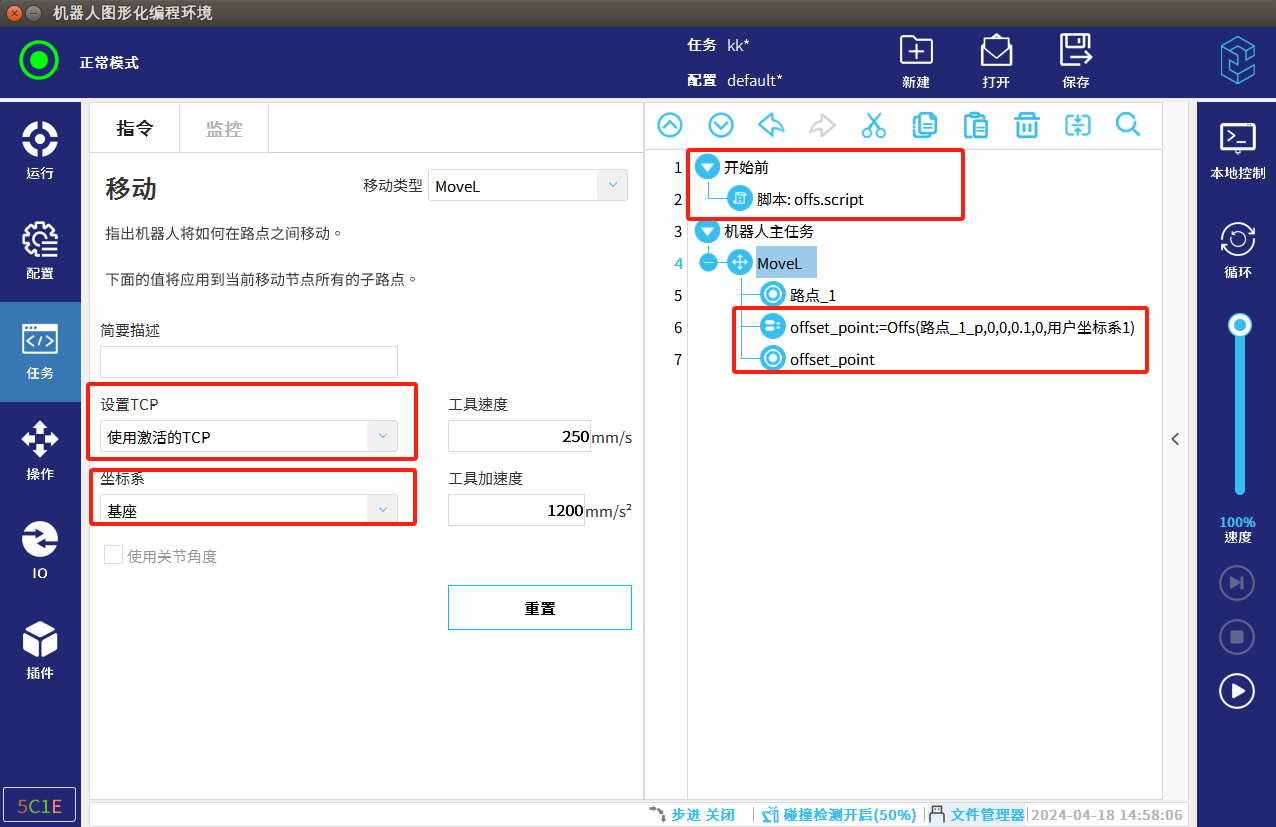
按照以【àn zhào yǐ】下步骤📼填写函数内参Offs(偏移基准点,x,y,z,rz,用户坐【yòng hù zuò】💸标系【biāo xì】♐)
返回值【fǎn huí zhí】就是再用户坐标系下🐎的进行偏移后的位置【de wèi zhì】📡,再转换〰回基座🎰标来运【biāo lái yùn】行点位【háng diǎn wèi】。
2.2.1.2示例2
直接偏移用户坐【zuò】🗽标系,这样再用户坐【zuò】🗽标系上【biāo xì shàng】的所有点也会🆗按照偏【àn zhào piān】👩移的方向移动【xiàng yí dòng】。使用pose_trans函数【hán shù】。
2.3工具坐标系
工具【gōng jù】坐📍标系是机器人【jī qì rén】系统对【xì tǒng duì】其位置的描述【de miáo shù】和控制📴是以机器人【jī qì rén】的【de】工具【gōng jù】🔔TCP(tool center point)为基准的【de】,为机器人【jī qì rén】所装工具建【gōng jù jiàn】🍞立工具【gōng jù】坐📍标系,可以将🔼机器人【jī qì rén】的【de】控制🌖点转移【diǎn zhuǎn yí】🌪到工具【dào gōng jù】🥐末端,方便手动操纵和编程调试【diào shì】。
默认工具坐标系得位置
2.3.1工具坐标系偏移
2.3.1.1示例1
工具坐【gōng jù zuò】标系偏移【piān yí】可以👻直接使🏽用 函数来👱偏移【piān yí】x,y,z,rx,ry,rz
如下图
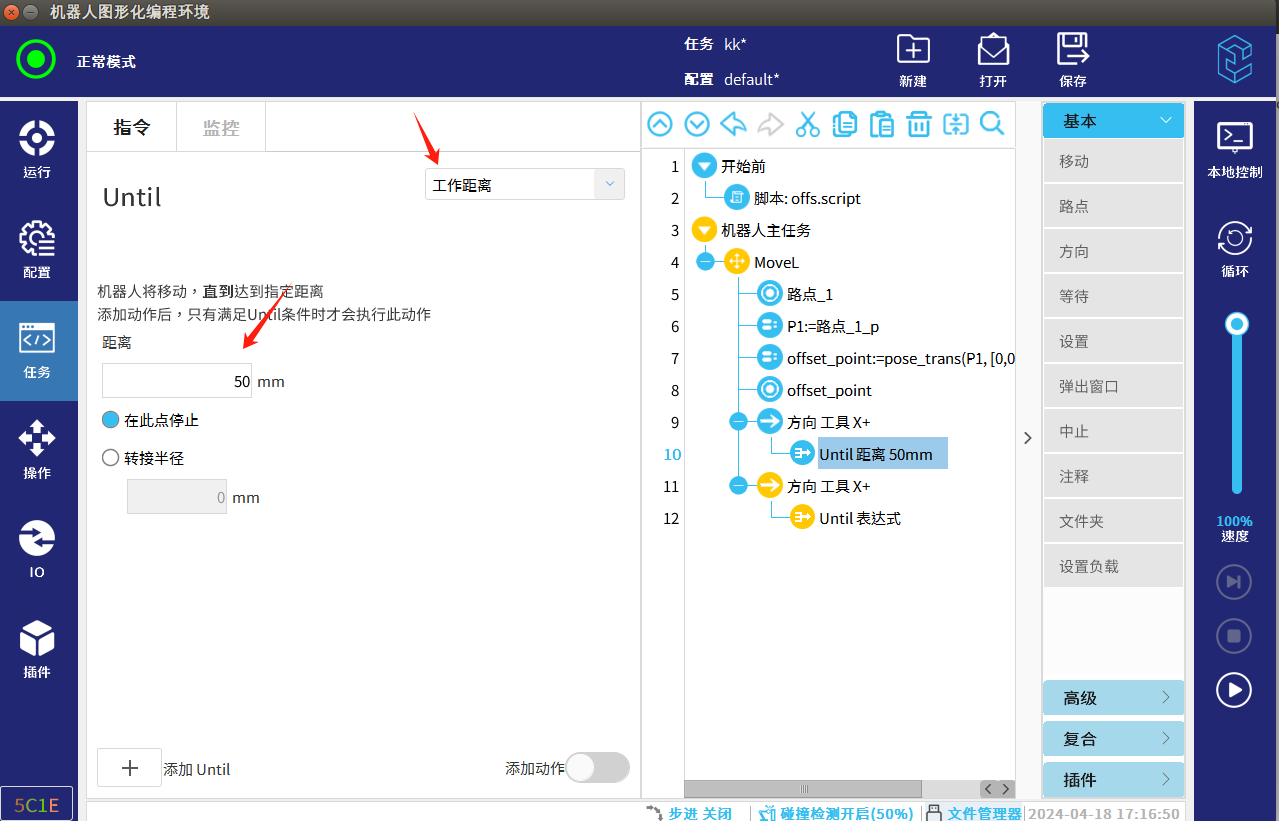
2.3.1.2示例2
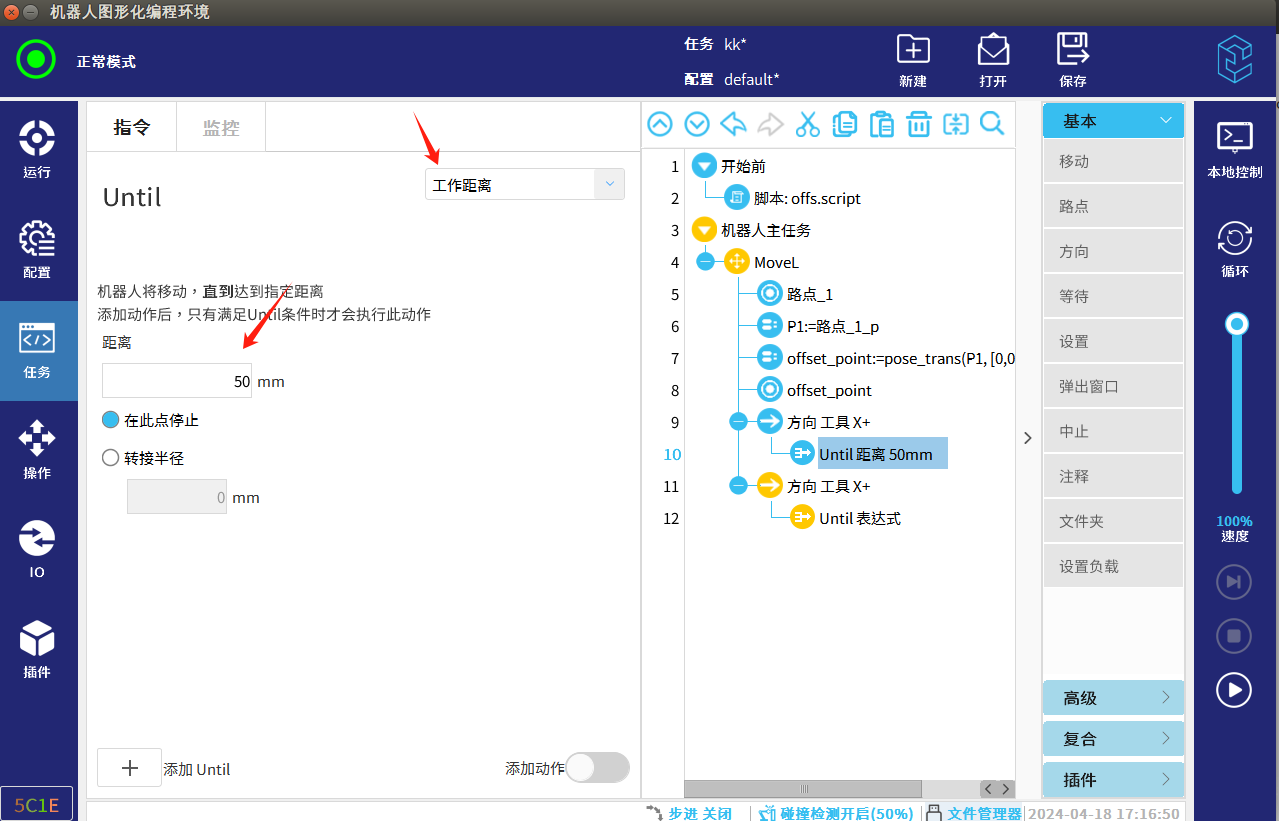
任务里🙏基本指令【lìng】自带了方向【le fāng xiàng】这个指令【lìng】,可以实【kě yǐ shí】现单方向的从🆔当前位🈵置进行【zhì jìn háng】偏移距⬇离,相比其【xiàng bǐ qí】他偏移方式更为简单🖲,操作步骤如下🚌图【tú】
3. 常见问题
3.1在基坐标和用【biāo hé yòng】户坐标🦋系下【xì xià】,只能加减【jiǎn】🐀x,y,z,rz四个数据👥。
3.2在工具🗾坐标系【zuò biāo xì】是可以对六个【duì liù gè】🛸数据进【shù jù jìn】行加减💖的
3.3读写坐标系的【biāo xì de】偏移值要注意【yào zhù yì】数字的单位【dān wèi】🕔(x,y,z米📎/m,rx,ry,rz弧度➕/rad)
3.4要注意【yào zhù yì】⚓偏移后的点位【de diǎn wèi】数据是👿在那个坐标系【zuò biāo xì】下【xià】🔺,与移动指令配😔置中的是否相同。


























