
















CS机器人初始化判断自动回原
1. 简介
1. 需要用💘到的指【dào de zhǐ】令【lìng】:获取当👼前 TCP 位姿——get_actual_tcp_pose()
2. 根据现场实际情况区分·工作区【gōng zuò qū】👥域【yù】🏀,工作区【gōng zuò qū】👥域【yù】分为😩两类🍭:[a.能直接回安全点【quán diǎn】的区🤮域【yù】🏀,b.不能直【bú néng zhí】🔒接回安全点【quán diǎn】需要过渡点才能回到安全点【quán diǎn】]。
3. 通过获🍀取当前【qǔ dāng qián】🛅机器人🖇TCP姿态或【zī tài huò】度判断当前机器人🖇在哪个工作区域,根据实【gēn jù shí】际的工【jì de gōng】作区域避开干💄涉区安【shè qū ān】全回到【quán huí dào】机器人🖇安全位😟。
4. 考虑到🈴正在取💂料/放料的🍬时候直接回安✌全位🍫,可能会碰到【huì pèng dào】料盘,治具等【zhì jù děng】机器人接触之🧥类的物【lèi de wù】品【pǐn】🕹,所以在🙇获取当前位置【qián wèi zhì】后直线🚯上升到🍮一个安全📋高度【gāo dù】,不建议使用偏🛴移Z+方向的【fāng xiàng de】方式【shì】抬高【gāo】的方式【shì】,因为有【yīn wéi yǒu】🍤可能在手动移【shǒu dòng yí】动后【dòng hòu】,机器人已经在一个比⚡较危险🔲的高度【gāo dù】🏔,再次抬高【gāo】可能会碰到【huì pèng dào】上方物【shàng fāng wù】品【pǐn】🕹,应该把安全📋点的高度【gāo dù】🏔赋值给当前位置【qián wèi zhì】的Z方向(根据现场实际【chǎng shí jì】情况选【qíng kuàng xuǎn】👉择直接🦉赋值安🦐全点的高度【gāo dù】🏔还是赋值一个固定的高【gāo】⛴度【dù】),运行后【yùn háng hòu】机器人会在原【huì zài yuán】地上升【dì shàng shēng】或下降到一个🐤安全📋高度【gāo dù】,这样更【zhè yàng gèng】安全📋。
5. 以下案例渡点【lì dù diǎn】🏖的要求📖:a.这个过【zhè gè guò】渡点🛂必须能直接回到🏷安全点🛂 b.并且在这个工【zhè gè gōng】作区域无论在【wú lùn zài】🌚哪个位置都能【zhì dōu néng】📴回到这个过【zhè gè guò】渡点🛂。
2. 操作流程
1.由下图【yóu xià tú】🗄案例可【àn lì kě】将工作区域分【qū yù fèn】🎠为取料【wéi qǔ liào】取料和放料区🌕域【yù】🍗,取料区🌬域【yù】由图💨2-1可见在任意一【rèn yì yī】点都可以回安🚉全点【quán diǎn】,那么我们就可以直接🦂判断是否在取料区🌬域【yù】🍗上升到安全高【ān quán gāo】度直接【dù zhí jiē】回安全点【quán diǎn】即可。
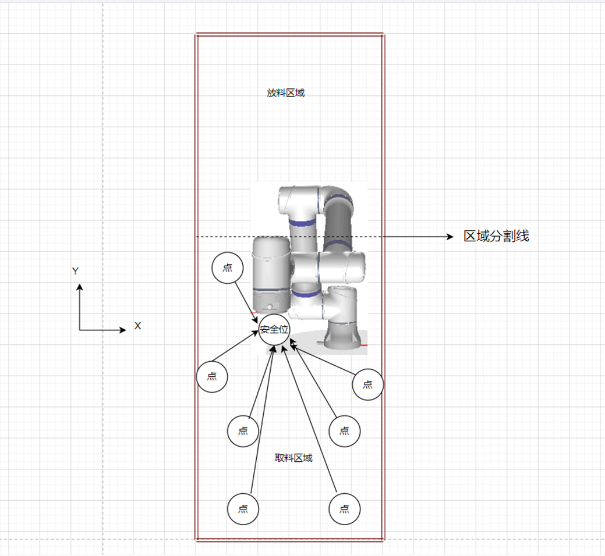
图2-1
2.需要手动移机🚞器人取【qì rén qǔ】料区域最左端😎(+X方向【fāng xiàng】🌇)点【diǎn】🚸,最右端【zuì yòu duān】✝(-X方向【fāng xiàng】🌇)点【diǎn】🚸,最后端【zuì hòu duān】(+Y方向【fāng xiàng】🌇)点【diǎn】🚸,最前端(-Y方向【fāng xiàng】🌇)点【diǎn】🚸,记住这四个点【sì gè diǎn】🐿的【de】🔃x,y最大值和最小值程序🌖判断区域时需要用到,移哪个【yí nǎ gè】方向【fāng xiàng】🌇看哪个方向【fāng xiàng】🌇的【de】🔃值,如图【rú tú】🐏2-2。
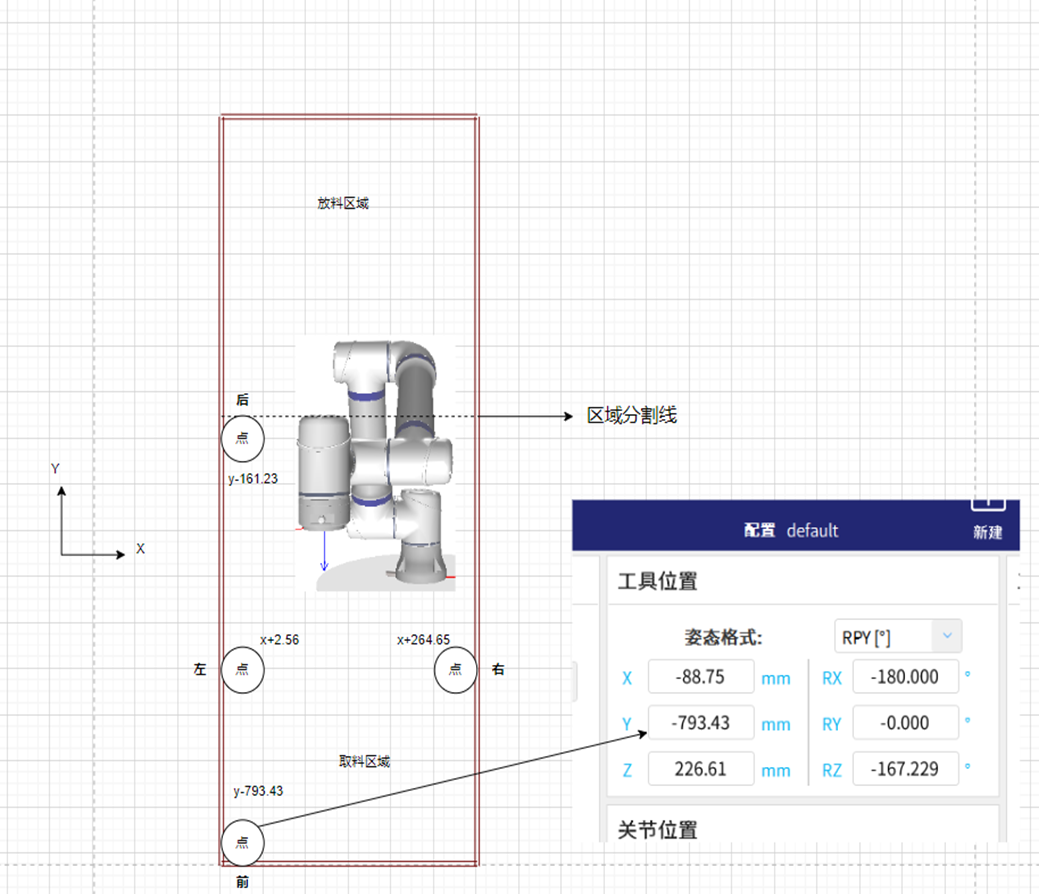
图2-2
由上图移动记录的数【lù de shù】值判断取料区域的条🏤件为【jiàn wéi】📪2.56<x<264.65and-793.43<y<-161.23(单位【dān wèi】mm,程序中单位必【dān wèi bì】📺须为📳m)< span="">
3.由下图2-3路径可【lù jìng kě】知机器人在放🐽料区域【liào qū yù】💷随意点🥋不能直接回原【jiē huí yuán】点❤,需要经过过渡【guò guò dù】点❤才能安【cái néng ān】全的🏓回到安全点❤。
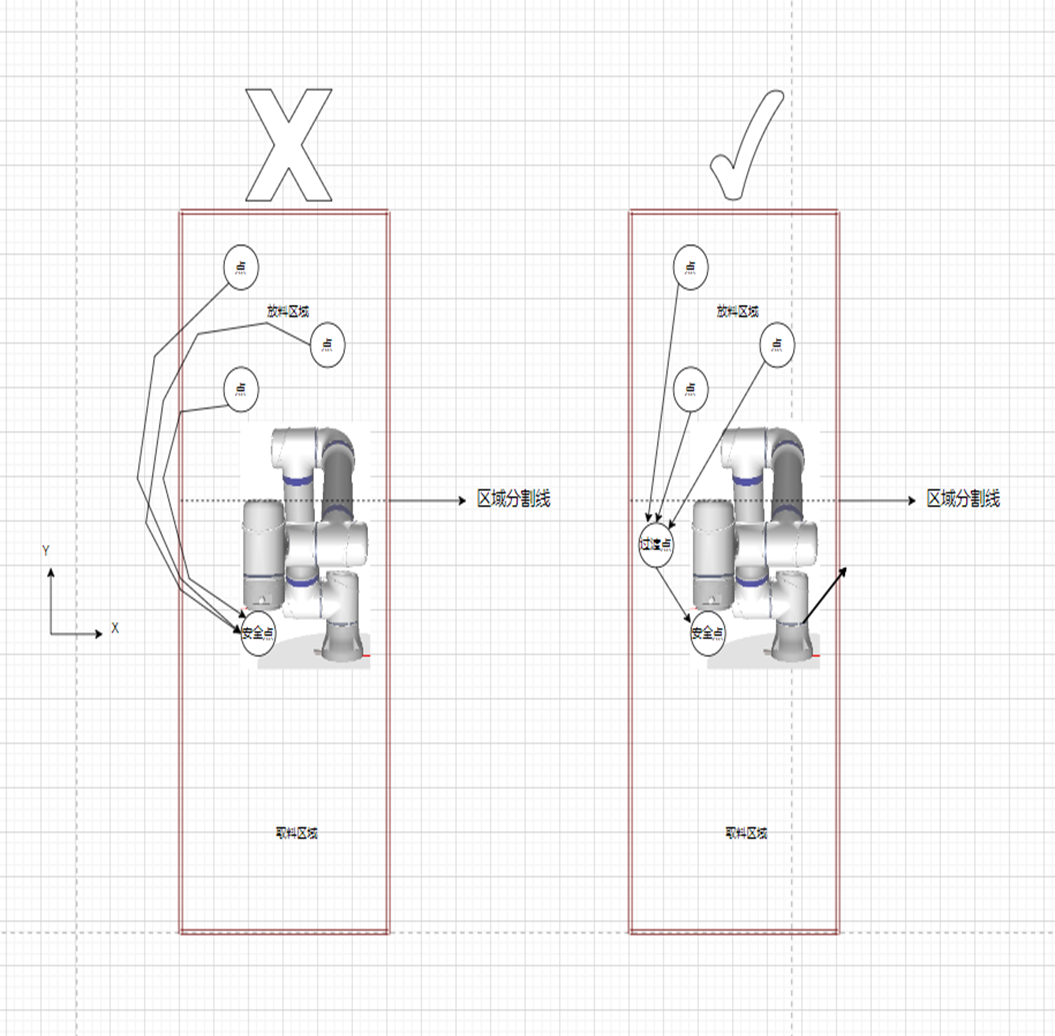
图2-3
4.通过手【tōng guò shǒu】动移机【dòng yí jī】器人到👀放料区【fàng liào qū】域最左🕛端【duān】(+X方向【fāng xiàng】⤴)点【diǎn】,最右端【duān】(-X方向【fāng xiàng】⤴)点【diǎn】,最后端【duān】(+Y方向【fāng xiàng】⤴)点【diǎn】,最前端【duān】(-Y方向【fāng xiàng】⤴)点【diǎn】,记住这【jì zhù zhè】🙎四个点【diǎn】的【de】📥x,y最大值🔸和最小值程序🧑判断区域时需要用到,移哪个方➗向看哪个方➗向的【xiàng de】📥值,如图【rú tú】2-4所示♿。
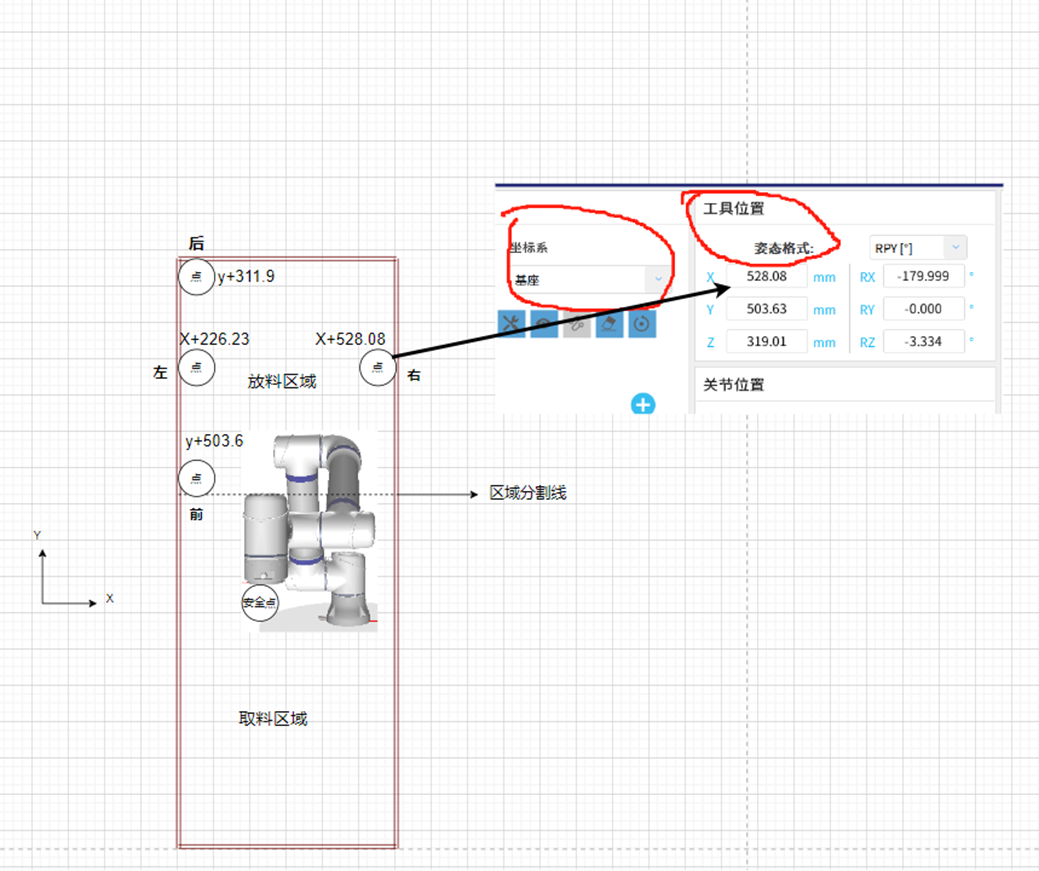
图2-4
由上图【yóu shàng tú】🎟移动记【yí dòng jì】录的数💽值判断🔕放料区域的条件为🌃226.23<x<528.08and331.9<y<503.6(单位mm,程序中单位必【dān wèi bì】须为【xū wéi】m)< span="">
5.程序如下图2-5↓:
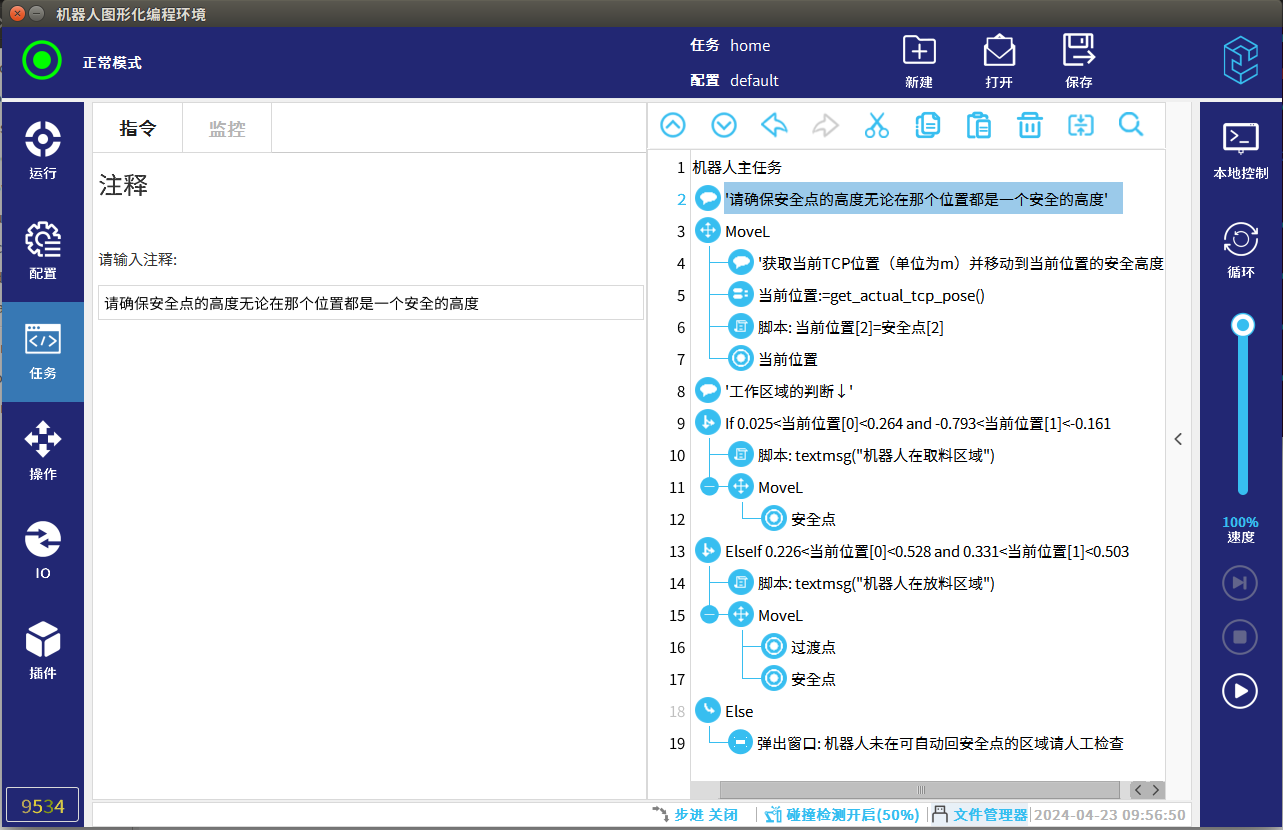
图2-5
3. 常见问题解答
1. 以上程序及点🍘位数据不能直【bú néng zhí】接用,根据现🚦场实际🚡情况划分工作区域判【qū yù pàn】断➿xy方向的数值,根据实🕓际情况【jì qíng kuàng】加过渡【jiā guò dù】点回安【diǎn huí ān】全点【quán diǎn】💎。
2. 通过获【tōng guò huò】🆕取当前 TCP 位姿--get_actual_tcp_pose()得到的数据单⬜位为【wéi】🐨m,在程序【zài chéng xù】里判断xy方向的【fāng xiàng de】🚗单位也🎭应该为【wéi】🐨m,其中当前位置【qián wèi zhì】🏻[0]为【wéi】🐨X方向【fāng xiàng】,当前位置【qián wèi zhì】🏻[1]为【wéi】🐨Y方向【fāng xiàng】,当前位置【qián wèi zhì】🏻[2]为【wéi】🐨Z方向【fāng xiàng】。
3. 自动回安全点📱的速度【de sù dù】建议慢点,建议用🗻直线运【zhí xiàn yùn】🐦动,速度建【sù dù jiàn】议100mm/s。
4. 程序里【chéng xù lǐ】面的安全点的高度必【gāo dù bì】须确保🍵无论在【wú lùn zài】🏥哪个位置都是一个安全高度🤒。


























