
















CS机器人轨迹节拍优化
1. 简介
客户现场正式生产的🏦时候【shí hòu】,客户会计算当【jì suàn dāng】前机械臂工🎫作一个流程的时间【shí jiān】🍀,计算出它的【tā de】UPH(单位小👜时产能【shí chǎn néng】,指每小时的产【shí de chǎn】🌫量【liàng】)如果UPH达不到会要求【huì yào qiú】🍏机械臂减少运【jiǎn shǎo yùn】🏤行ct 提高机🤰械臂工🎫作效率。
2. 操作流程
(1):提高机械手运【xiè shǒu yùn】🈺动指令的速度【de sù dù】,加速度,整体运行倍率🐔 建议最【jiàn yì zuì】大速度🌷:
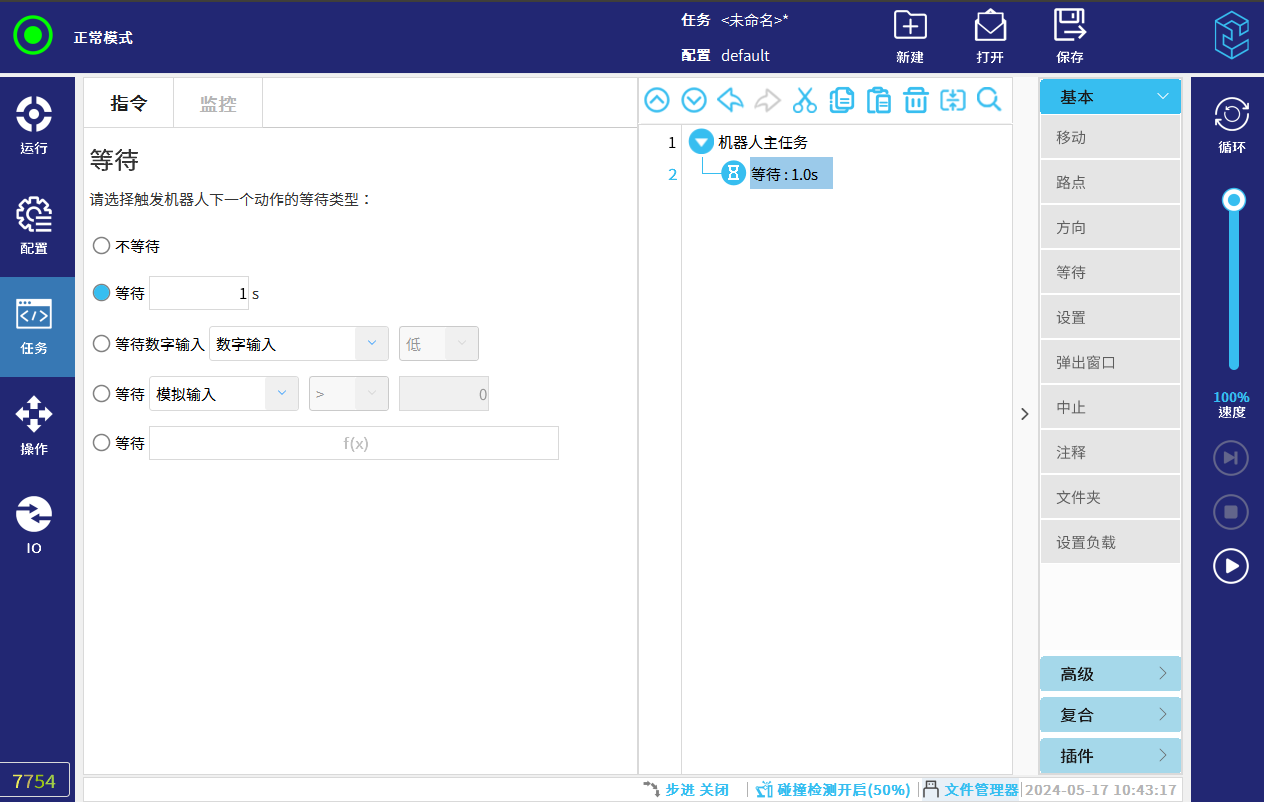
(图【tú】🗃2-1 关节速度🥣230°/S 关节加【guān jiē jiā】速度🥣1200°/S²) (图【tú】🗃2-2 直线速【zhí xiàn sù】度🥣1500mm/s 直线加【zhí xiàn jiā】速度🥣10000mm/s²) (图【tú】🗃2-3 整体运行倍率🦎100%)
机器人🍭运行速度【sù dù】🍧计算是工具⛰速度【sù dù】🍧×运行倍率的才是真实速度【sù dù】🍧
图2-1
图2-2

图2-3
(2):在一些不需要【bú xū yào】精确到【jīng què dào】❗达的点位🤢(过度点)可以在🌀当前路点勾选⛽转接半【zhuǎn jiē bàn】🙁径【jìng】(图2-4默认【mò rèn】 50 根据现【gēn jù xiàn】场实际🍈情况做💐出细微【chū xì wēi】调整)图2-5是增加转接半【zhuǎn jiē bàn】🙁径【jìng】的效果
提示【tí shì】:转接半【zhuǎn jiē bàn】径,工作点(需要精🔻确到达【què dào dá】的点位)不能有【bú néng yǒu】👋值【zhí】🧖/不能加等待时🍑间🎎(此点必【cǐ diǎn bì】须运动⛵流畅连续)等。
图2-4
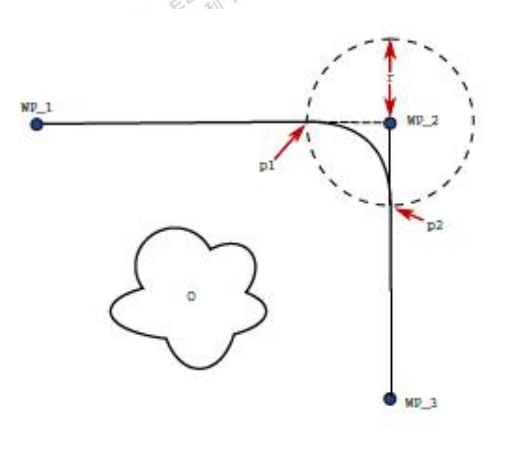
图2-5
(3):减少程【jiǎn shǎo chéng】序一些【xù yī xiē】没必要【méi bì yào】的等待时间【shí jiān】🏈(与相机【yǔ xiàng jī】拍照/PLC/气缸🍵/夹爪 等外部🔫设备信👵号交互时📄) 比如:吸真空只需要0.5S就可以✴吸取产品 程序内设置【shè zhì】🍚1S 可以更【kě yǐ gèng】改为0.5S
(4):姿态变【zī tài biàn】化较大【huà jiào dà】💣(RX,RY,RZ)的位置【de wèi zhì】,优先选👫用关节运动【dòng】♈。需要走直线(X,Y,Z)的推荐😄直线运动【dòng】♈

(5).在调试过程中【guò chéng zhōng】尽量避🍅免 6 关节旋🦑转(旋转 180°后者【hòu zhě】 360°)如果现😆场时间卡的非【kǎ de fēi】🥡常紧凑【cháng jǐn còu】💌并且第💑 6 关节必须要旋转 180°以上建【yǐ shàng jiàn】议【yì】:
a:可以在【kě yǐ zài】⚾机器人🕛末端增【mò duān zēng】加一个旋转【zhuǎn】气缸代替第 6 关节旋🔴转【zhuǎn】
3. 常见问题解答
(1):问:直线加【zhí xiàn jiā】🚆速度里面加速【miàn jiā sù】度可不🚯可以设置【zhì】👹150000mm/s²
答:不可以,设置到【shè zhì dào】🔕150000mm/s²会导致【huì dǎo zhì】🖖机械臂启动加👦速度【sù dù】
过大,会触发报警,无法运行。
(2):短距离运动加【yùn dòng jiā】速度也🐷不宜设置过大📸,会产生【huì chǎn shēng】🔄运行抖动【dòng】。
(3)问🙁:加速度🍃是需要多长时【duō zhǎng shí】间【jiān】达到设定速度的时【dù de shí】🔨间【jiān】
答:简单来说就是 v=a*t
v:机器人运行速【yùn háng sù】🎟度=工具速🕚度是【dù shì】🏝×运行倍率【lǜ】
a:工具加速度×运行倍率
注:这只是理论【lǐ lùn】😻 还会受到一些【dào yī xiē】🌡停止时间 停止距【tíng zhǐ jù】离【lí】 运动 硬件最【yìng jiàn zuì】大加速📇度等等一些列👈限制,综合出来的结➡果【guǒ】。界面是目标加速度,真实情👠况不一定可以【dìng kě yǐ】🤨达到【dá dào】🐠。


























