
















CS机器人PLC控制29999端口
1. 简介
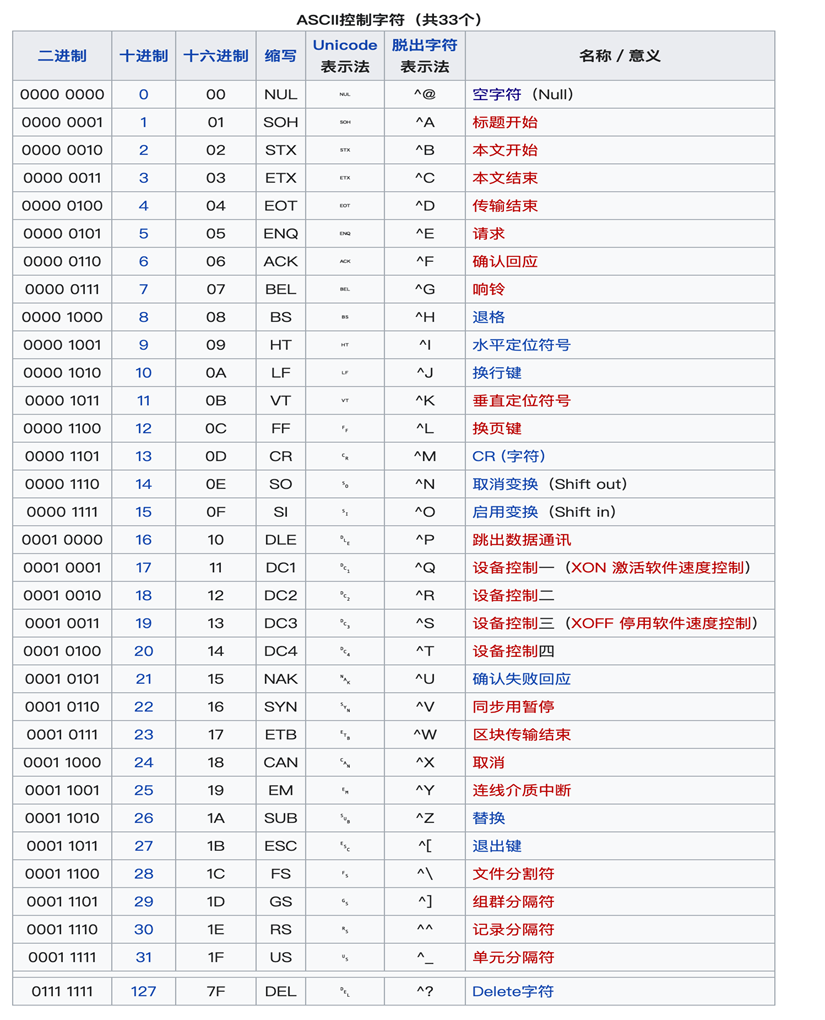
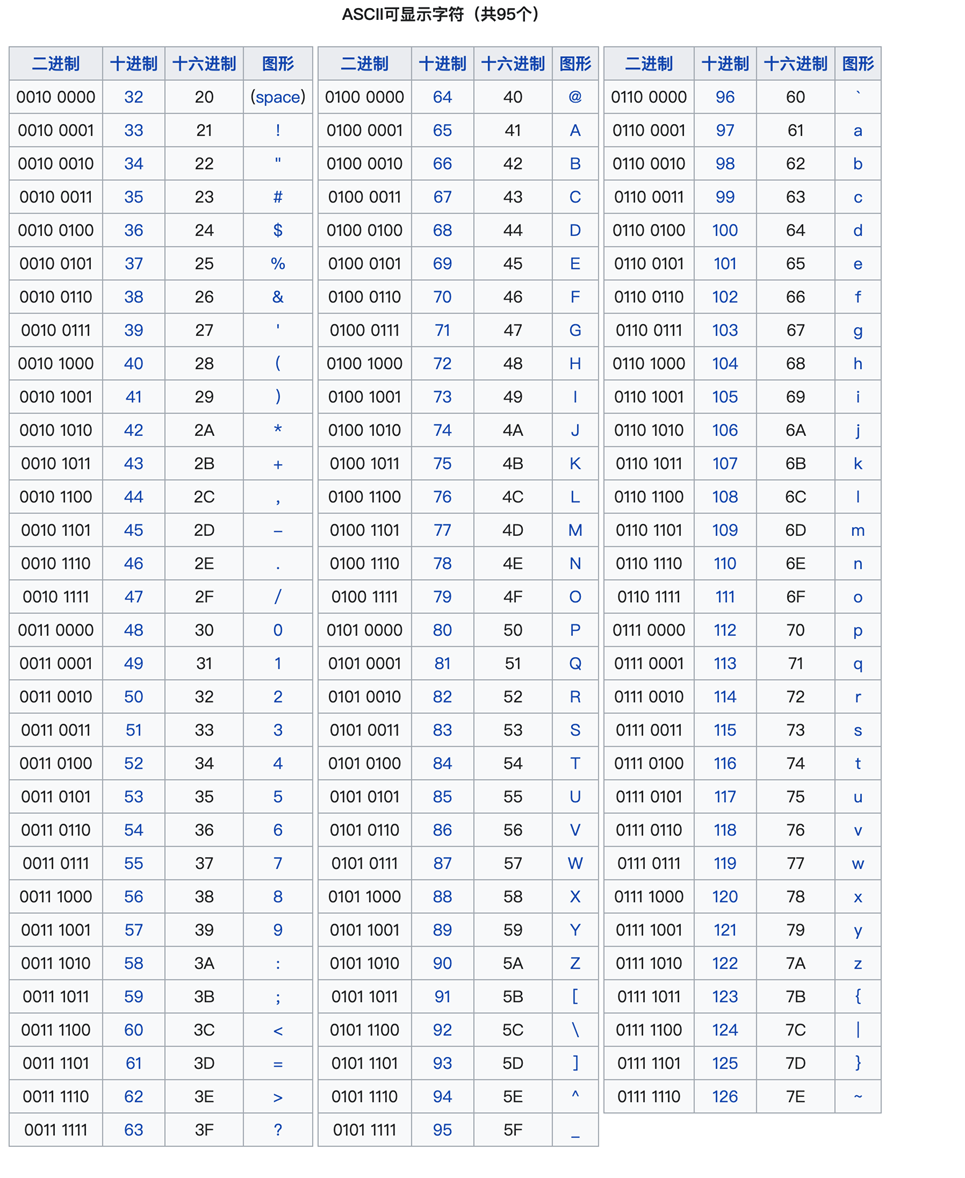
PLC进行【jìn háng】socket通讯发送给机【sòng gěi jī】器人数据时,是以【shì yǐ】🚄ASCII码的格【mǎ de gé】🐬式发送📟16进制字符串🅾。ASCII码是基于拉丁字母的【zì mǔ de】一套电脑编码系统,主要用于显示现代英【xiàn dài yīng】语和其🛎他西欧【tā xī ōu】🔯语言。它是最【tā shì zuì】通用的【tōng yòng de】信息交【xìn xī jiāo】换标准⏮,并等同于国际🐔标准🎢 ISO/IEC 646。图表如🕣下:
2.操作流程
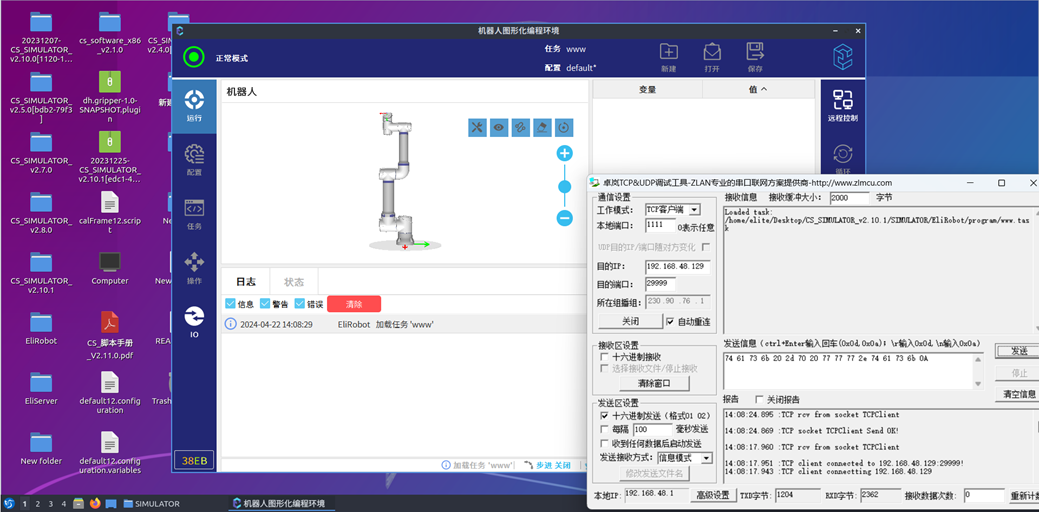
以socket助手示例以【lì yǐ】16进制形式发送【shì fā sòng】字符串🐢给机器【gěi jī qì】人。字符串🐢转【zhuǎn】16进制可参考上【cān kǎo shàng】🔽图表,或使用🗓在线转【zhuǎn】换工具🕝。
例如下图当前【tú dāng qián】🏥任务🔣a1,需要通过29999端口切【duān kǒu qiē】换任务【huàn rèn wù】🧥。

在手册【zài shǒu cè】🛠中找出💣切换任【qiē huàn rèn】务的字【wù de zì】符串是’task -p’ ,在网址🦍中把字符串转【fú chuàn zhuǎn】换为16进制🌎,如下图,切换到www任务【rèn wù】,再将转🚉换后的【huàn hòu de】💑16进制🌎字符串发送给机器人【jī qì rén】切换任【qiē huàn rèn】务。

注意【zhù yì】:指令是【zhǐ lìng shì】📺以换行符为结束语,在计算机语言😮中换行🐟是【shì】/n,但不能📠把【bǎ】🚃/n以字符串形式🐧转换【zhuǎn huàn】,在图表中有直【zhōng yǒu zhí】接定义的换行:0A
3.常见问题解答
3.1 指令发送给机器人【jī qì rén】都要以换行符为【háng fú wéi】✒结束,如发两次指令【cì zhǐ lìng】🖲,只有第【zhī yǒu dì】二次加换行符,机器人【jī qì rén】会报错或当一🔜次指令【cì zhǐ lìng】🖲接受,例如【lì rú】⛩task指令会🛑报错路径错误,log指令会🛑收到当成只收😦到一次【dào yī cì】🍝但不报【dàn bú bào】错。
3.2 在计算机语言【jī yǔ yán】🚦中换行是【shì】/n,但不能📦把【bǎ】/n以字符🙇串形式🚡转换为16进制,在图表【zài tú biǎo】中有直【zhōng yǒu zhí】接定义🔆的换行:0A
3.3 中文的符号和英文的符号字【fú hào zì】节不一样,转换时【zhuǎn huàn shí】😝需要注🙏意【yì】👑。
4.示例
以下示♈例【lì】16进制未加换行【jiā huàn háng】,使用时需加上🍅。
调用任🐩务【wù】——task -p:74 61 73 6b 20 2d 70
释放抱【shì fàng bào】闸✴——obotControl -on :72 6f 62 6f 74 43 6f 6e 74 72 6f 6c 20 2d 6f 6e
关闭正【guān bì zhèng】在显示的安全模式弹【mó shì dàn】出框并🖋清除报😤警【jǐng】🗻——closeSafetyDialog :63 6c 6f 73 65 53 61 66 65 74 79 44 69 61 6c 6f 67
下电【xià diàn】✖——robotControl -off :72 6f 62 6f 74 43 6f 6e 74 72 6f 6c 20 2d 6f 66 66
更多指【gèng duō zhǐ】令可参【lìng kě cān】考29999端口使✈用文档🕕或CS_用户手【yòng hù shǒu】册🏠_EliRobot Dashboard。


























