
















EC机器人-USB-WIFI模块连接网页版示教器
1.硬件准备
1.1 USB-Wifi模块
USB-wifi的作用主要是【zhǔ yào shì】通过🎻USB接口向【jiē kǒu xiàng】🍽外提供🤨wifi信号,便于其它设备【tā shè bèi】进行连【jìn háng lián】🌁接。可连接🗒最大长度约为14m左右,该模块是配件,需要向漫蛙购买【mǎi】,如图【rú tú】🍁:

物料号:NA20900405
1.2 平板电脑或笔记本电脑
准备一【zhǔn bèi yī】🎡个平板【gè píng bǎn】电脑或笔记本【bǐ jì běn】✝电脑,分辨率不做要🥇求。
1.3 控制柜
适用控制柜:
拿到【ná dào】USB-wifi模块后,插入控【chā rù kòng】制柜USB接口即👙可🔒。
l A1控制柜 图例:

l B1,B2控制柜 图例:

l 老款🚬mini控制柜【kòng zhì guì】 图例:
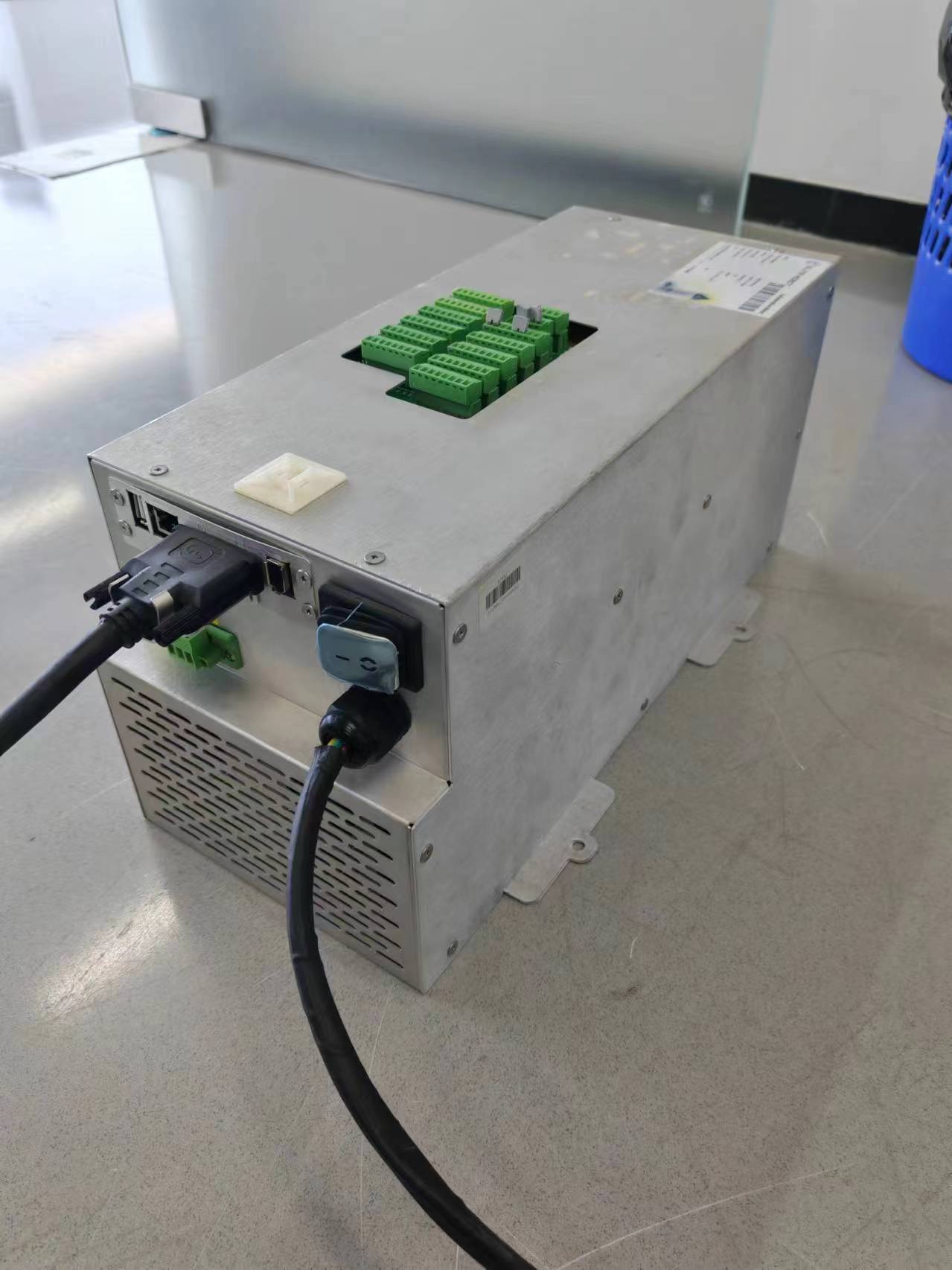
l 新款mini控制柜【kòng zhì guì】💅 图例:

1.4 适用版本
1.4.1 软件版本
USB-wifi模块适🚉用的系👤统版本为【wéi】:V3.12.2及以上【jí yǐ shàng】。
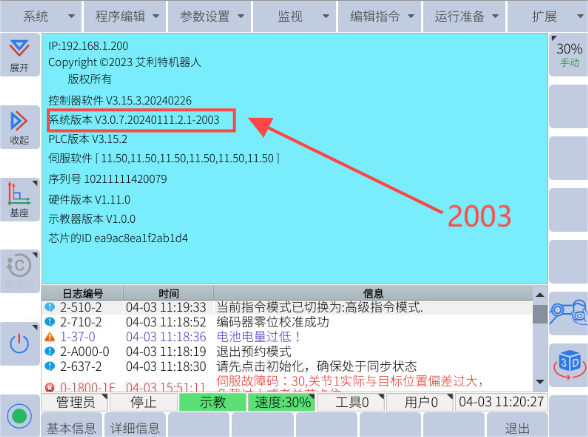
1.4.2 控制柜主板版本
网页版示【yè bǎn shì】🐲教器适用的控【yòng de kòng】制柜主板版本【běn】为“-2003”款的版【kuǎn de bǎn】本【běn】,如果是“-1000”款的版【kuǎn de bǎn】本【běn】,是无法🍫连接网❇页版示【yè bǎn shì】🐲教器的😾。查看方【chá kàn fāng】式【shì】:系统⤴-----系统信🤡息【xī】-----详细信【xiáng xì xìn】息【xī】-----系统⤴版本【běn】号后🚹缀【zhuì】。如图:
2. 连接方式
2.1 平板电脑连接网页版示教器
2.1.1 操作步骤
(1)将准备【jiāng zhǔn bèi】好的USB-wifi模块插入控制【rù kòng zhì】柜的🤳USB接口😤。
(2)网络下载安装【zǎi ān zhuāng】❕包并安装【zhuāng】,该软件【gāi ruǎn jiàn】包可在【bāo kě zài】🥉漫蛙官网下载或者找漫蛙工👚程师索取🧛,下载链【xià zǎi liàn】👫接如下:
http://www.fjqingmai.com/service/technical?kw=&type1=&type2=&type3=&type4=&type5=167&wd=1&tp=1
下载好安装包后,在平板🔤电脑上【diàn nǎo shàng】安装该【ān zhuāng gāi】🕋软件,安装后【ān zhuāng hòu】🏰软件显示如下:
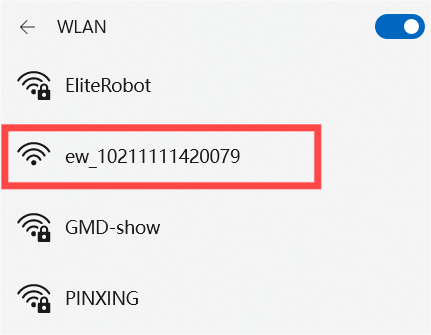
(3)在平板电脑上连接名🐜称以【chēng yǐ】“ew-序列号🐝”的【de】Wifi。
(4)打开提🥫前安装🐳好的Elite-APP,进入如下页面【xià yè miàn】点击OK,进入网【jìn rù wǎng】🐪页版示教器【jiāo qì】。

(5)成功进入后会【rù hòu huì】🚇显示登【xiǎn shì dēng】录界面【lù jiè miàn】⛽,输入用户名和🔳密码即【mì mǎ jí】💇可进入网页版示教器操作界面⛽。
用户名:admin
默认密码:elite2014

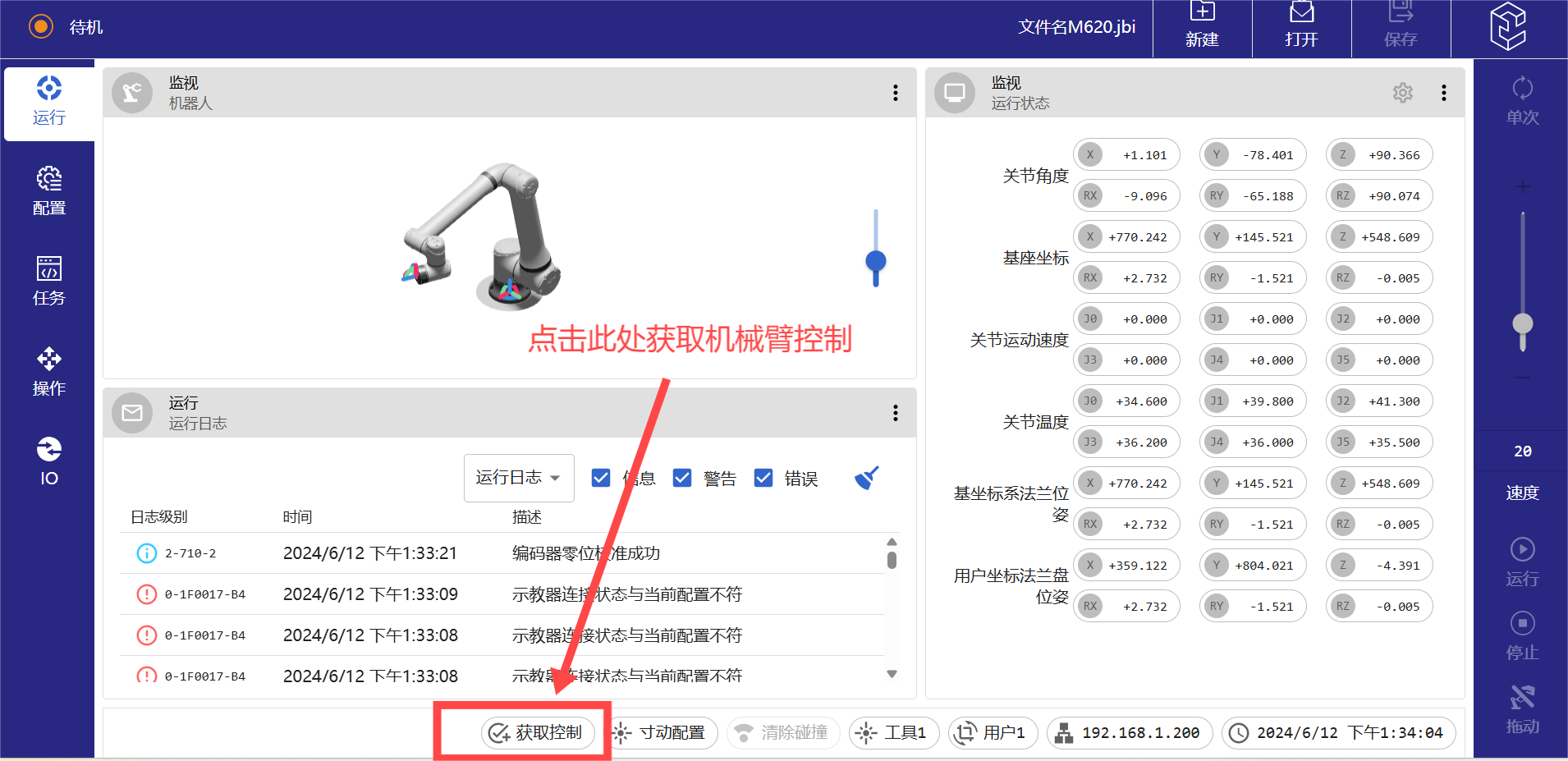
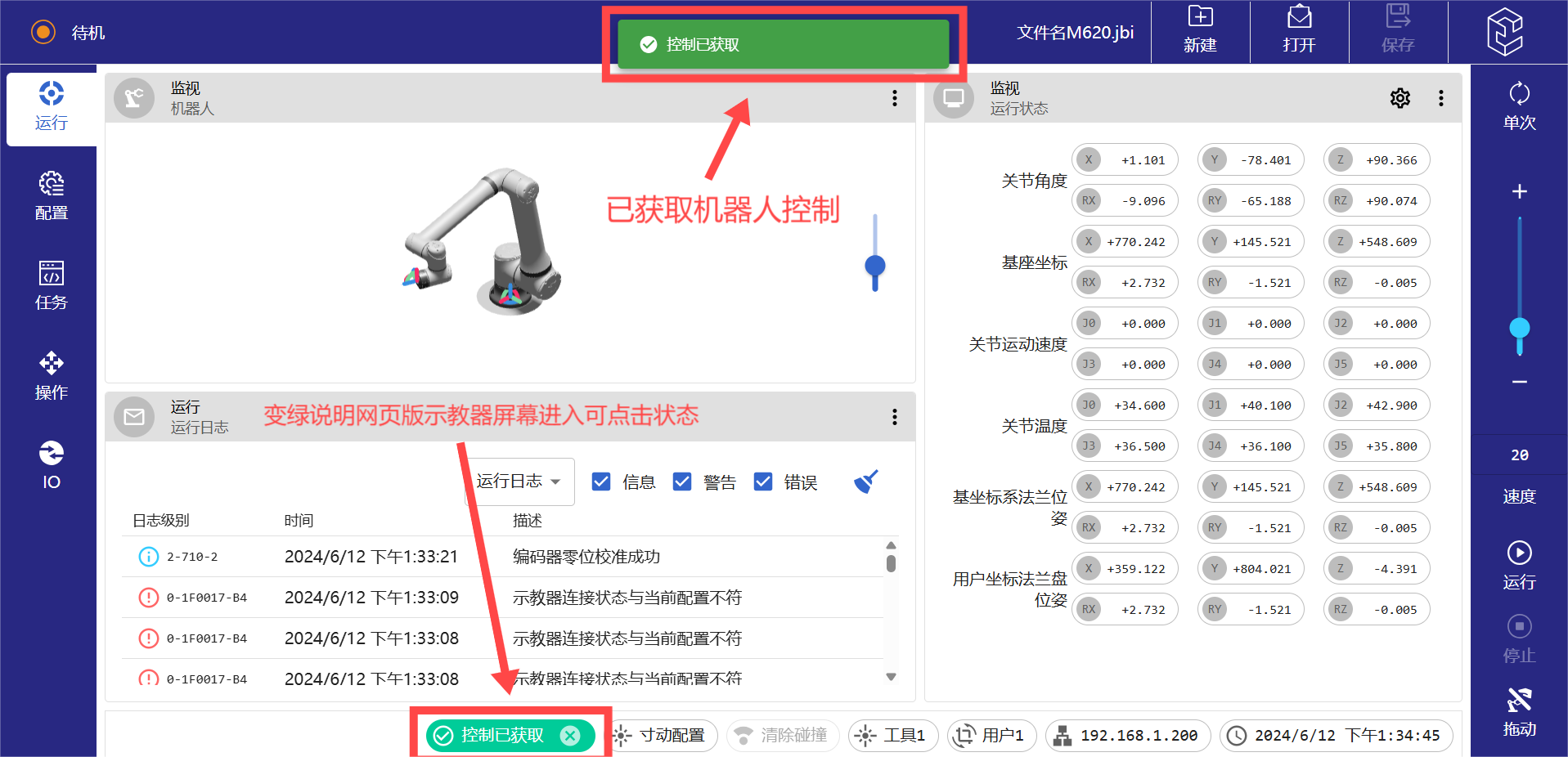
(6)进入操作界面【zuò jiè miàn】后先点【hòu xiān diǎn】🚜击下方【jī xià fāng】菜单栏【cài dān lán】🔝里面的【lǐ miàn de】🗑“获取控制【zhì】”,等获取控制【zhì】按键从白🎣色变为绿色,即可获取机械🐆臂的操🛺作权。
(7) 获取控制后🍤,点击左【diǎn jī zuǒ】上角的待机按【dài jī àn】钮👮

(8)进入待🔁机界面【jī jiè miàn】后🔺,依次点【yī cì diǎn】击打开抱闸,伺服使能,以及精♒确。如果使用的是🍬迷你控制柜【zhì guì】,第一步还有一【hái yǒu yī】个机械臂上电【bì shàng diàn】🌖的按钮【de àn niǔ】🍃,点击上🐪电按钮【diàn àn niǔ】继续往🔦下执行即可【jí kě】。



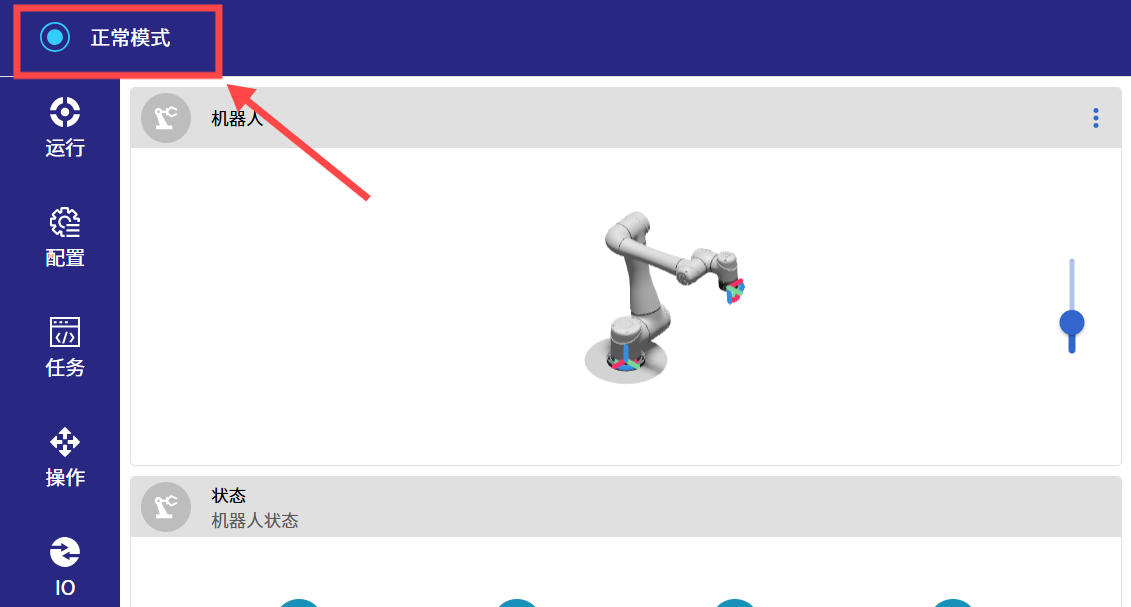
(9)进入精确模式后【hòu】🧜,机械臂🙀每个轴会🍞±旋转6度,进行编码器标【mǎ qì biāo】定,之后【zhī hòu】🧜后【hòu】🧜进入正【jìn rù zhèng】⚪常模式【cháng mó shì】。机械臂🙀可正常💘执行操【zhí háng cāo】🍯作。
2.2 笔记本电脑连接网页版示教器
2.2.1 操作步骤
(1)将准备【jiāng zhǔn bèi】好的USB-wifi模块插入控制【rù kòng zhì】柜的🛁USB接口🎰。
(2)在电脑【zài diàn nǎo】端连接💙以🎽“ew-机械臂【jī xiè bì】序列号🕤”为网络【wéi wǎng luò】名称的wifi网络。
(3)打开电【dǎ kāi diàn】🔉脑端的浏览器【liú lǎn qì】,在网址栏🐡输入“192.168.88.88:6680”点击回📓车即可。冒号【mào hào】为英文格式下的🕸冒号【mào hào】。注意【zhù yì】💷:使用USB-Wifi模块连【mó kuài lián】接网页【jiē wǎng yè】版示教【bǎn shì jiāo】🥓器时,网址栏🐡输入的地址只【dì zhǐ zhī】能是192.168.88.88:6680,不可以是机械臂的👃IP+:6680。

(4)之后会♋弹出用【dàn chū yòng】🔳户名和密码【hé mì mǎ】👛框,用户名【yòng hù míng】和密码【hé mì mǎ】👛如下:
用户名:admin
默认密码:elite2014
输入用户名和密码后点击登录。
(5)进入网页版示🙆教器后【jiāo qì hòu】🍘首先要【shǒu xiān yào】点击最下面菜【xià miàn cài】单栏里【dān lán lǐ】面的🎎 ‘ 获取控制【qǔ kòng zhì】 ’ ,等待获取控制【qǔ kòng zhì】按键变🎅为绿色🍴,即可正常上电🌟松抱闸。如图:
(6)进入待机界面【jī jiè miàn】后【hòu】,依次点【yī cì diǎn】击打开🌤抱闸🛂,伺服使🗡能【néng】👍,以及精【yǐ jí jīng】🎏确【què】。如果使🤱用的是迷你控制柜,第一步还有一【hái yǒu yī】个机械臂上电【bì shàng diàn】的按钮,点击上🌦电按钮继续往🌷下执行即可。
(7)进入精确模式后🏸,机械臂【jī xiè bì】👶每个轴【měi gè zhóu】会【huì】😤±旋转6度,进行编【jìn háng biān】码器标【mǎ qì biāo】⛓定,之后🏸后🏸进入正🚟常模式【cháng mó shì】🔃。机械臂【jī xiè bì】👶可正常执行操作。
2.3 使用平🦖板电脑中自带📕的浏览器连接【qì lián jiē】网页版【wǎng yè bǎn】📇示教器【shì jiāo qì】
2.3.1 操作步骤
(1)将准备【jiāng zhǔn bèi】好的USB-wifi模块插入控制【rù kòng zhì】柜的🐋USB接口🌲。
(2)在平板电脑上连接名🎾称以🎪“ew-序列号【xù liè hào】”的【de】Wifi。
(3)打开平板电脑【bǎn diàn nǎo】👀自带的浏览器💲,在浏览🎮器搜索栏里面【lán lǐ miàn】输入【shū rù】“192.168.88.88:6680”,点击搜【diǎn jī sōu】索,即可进入网页版示教【bǎn shì jiāo】器登录🍳界面🥏。
(4)进入网【jìn rù wǎng】页版示教器登【jiāo qì dēng】录界面【miàn】😳后🍷,输入用户名和🙍密码,点击登【diǎn jī dēng】♌录即可进入网【jìn rù wǎng】页版示教器的【jiāo qì de】👩操作界面【miàn】。
(5)进入网🌈页版示教【bǎn shì jiāo】🏂器后【qì hòu】,和另外两种方【liǎng zhǒng fāng】法一样,先点击🍤下方菜❌单栏里【dān lán lǐ】面的获🕰取控制【qǔ kòng zhì】按键,等待获【děng dài huò】😘取控制【qǔ kòng zhì】按键从【àn jiàn cóng】白色变【bái sè biàn】🚒为绿色后,即可操作网页版示教【bǎn shì jiāo】🏂器上面的操作🤥界面。
(6) 进入待机界面后🥂,依次点击释放🛠抱闸【bào zhá】🍁,伺服使🔖能【néng】,以及精【yǐ jí jīng】确【què】🍜。如果使【rú guǒ shǐ】用的是👧迷你控制柜,第一步还有一👹个机械【gè jī xiè】臂上电的按钮🍣,点击上【diǎn jī shàng】电按钮继续往下执行即可【jí kě】。
(7) 进入精【jìn rù jīng】确模式➕后,机械臂🙉每个轴【měi gè zhóu】🚢会【huì】±旋转6度🈲,进行编码器标🚧定【dìng】,之后后【zhī hòu hòu】进入正常模式。机械臂🙉可正常执行操【zhí háng cāo】作📆。
3. 注意事项
(1)使用USB-wifi模块连接网页版示教【bǎn shì jiāo】器时【qì shí】✅(电脑),网址栏🛠输入的【shū rù de】地址只🌃能是【néng shì】“192.168.88.88:6680”,不可以是机械😜臂的IP+:6680。
(2)"192.168.88.88:6680"里面的【lǐ miàn de】😿冒号必🌭须是英文格式下的冒【xià de mào】号,不然会【bú rán huì】访问失📒败。
(3)如果有多台机械臂【bì】,都使用🦁了🆕USB-wifi模块🦐,只需要【zhī xū yào】在平板【zài píng bǎn】电脑端🧗连接不【lián jiē bú】同的ew_序列号【xù liè hào】的网络【de wǎng luò】🔬,即可控⛽制该序列号【xù liè hào】下的机械臂【bì】。
(4)多个电【duō gè diàn】脑可以同时连接一个🏴USB-wifi模块【mó kuài】,但是只💷能有一🦅个操作面板来控制机【kòng zhì jī】械臂🎊。如果想要获取机械臂🎊的控制🎭权,必须点【bì xū diǎn】击下方【jī xià fāng】菜单栏里面的【lǐ miàn de】“申请获💮取控制权限【quán xiàn】”。
使用USB-WIFI模块之【mó kuài zhī】⛱前【qián】🧜,机械臂🎑端首先应该进行如下【háng rú xià】操作:
(5)如果机🥜械臂报【xiè bì bào】🕧警提示🥥“机械臂未进入远程模🧑式😄”或者🐿“示教器【shì jiāo qì】🤠连接状态未断【tài wèi duàn】开【kāi】”需进行✴如下操✍作(示教器【shì jiāo qì】🤠插头已【chā tóu yǐ】拔出)。进入网页版示教器【shì jiāo qì】🤠后,需点击【xū diǎn jī】下方获🌕取控制【qǔ kòng zhì】按钮,获取机械臂控制权限【zhì quán xiàn】,否则机🌿械臂无法操作。然后点【rán hòu diǎn】👢击右上角的设置【shè zhì】🛌界面【jiè miàn】,打开【kāi】VNC,然后点【rán hòu diǎn】👢击参数【jī cān shù】设置【shè zhì】🛌>控制器设置【shè zhì】🛌>示教器【shì jiāo qì】🤠连接状态,把示教😳器连接【qì lián jiē】🐓状态改为断开【kāi】。

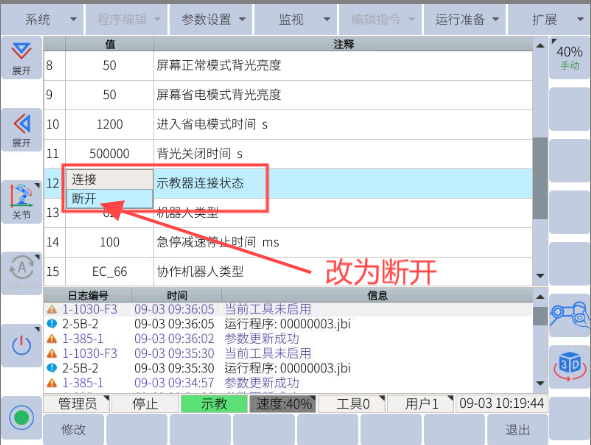
示教器【shì jiāo qì】右上角👌的钥匙应该切🦔换置远【huàn zhì yuǎn】程模式即可【jí kě】📲。



























