
















EC机器人节拍优化
1.简介
客户现场正式生产的【shēng chǎn de】时候,客户会👊计算当前机械臂工作一个流🤒程的时【chéng de shí】🧐间【jiān】🥃,计算出【jì suàn chū】它的 UPH
(单位小时产能【shí chǎn néng】,指每小【zhǐ měi xiǎo】👻时的产【shí de chǎn】量【liàng】)如果📱 UPH 达不到🔊会要求【huì yào qiú】机械臂减少运🏫行 ct 提高机🖍械臂工作效率。
2.操作流程
(1):减去多🐌余的动作【zuò】,尽可能【jìn kě néng】🛑让机器【ràng jī qì】人动作【zuò】🔓简洁🈺,可以减少对应【shǎo duì yīng】机器人到位减🍲速和加速的时【sù de shí】间。
(2):提高机♓械手运【xiè shǒu yùn】🍗动指令【dòng zhǐ lìng】的速度,加速度⚓,整体运【zhěng tǐ yùn】行倍率 建议最大速度:
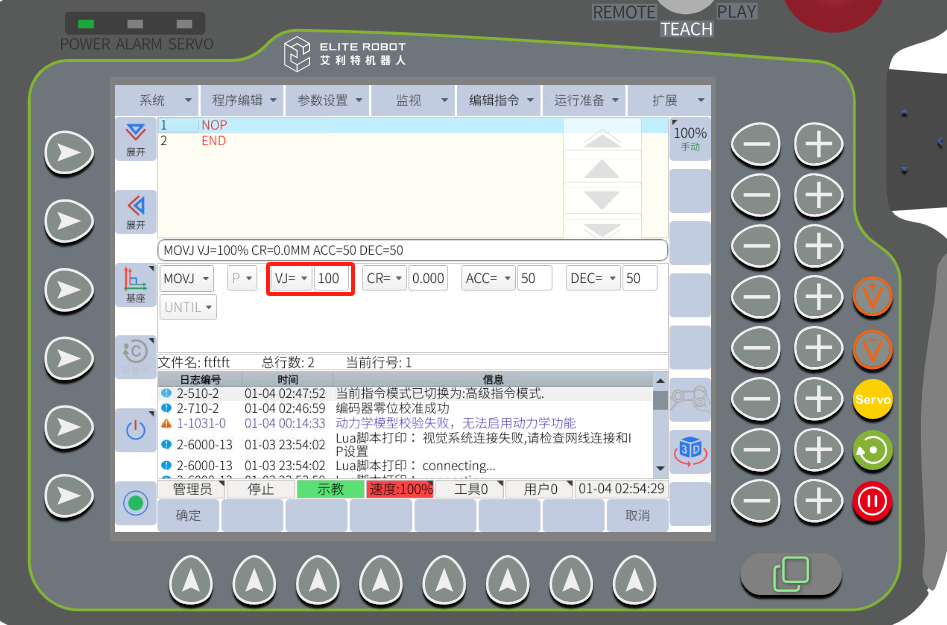
如下图,分别是🐔MOVL和MOVJ的速度【de sù dù】❌和加速度❌,其他运动方式【dòng fāng shì】也是一样【yàng】😒
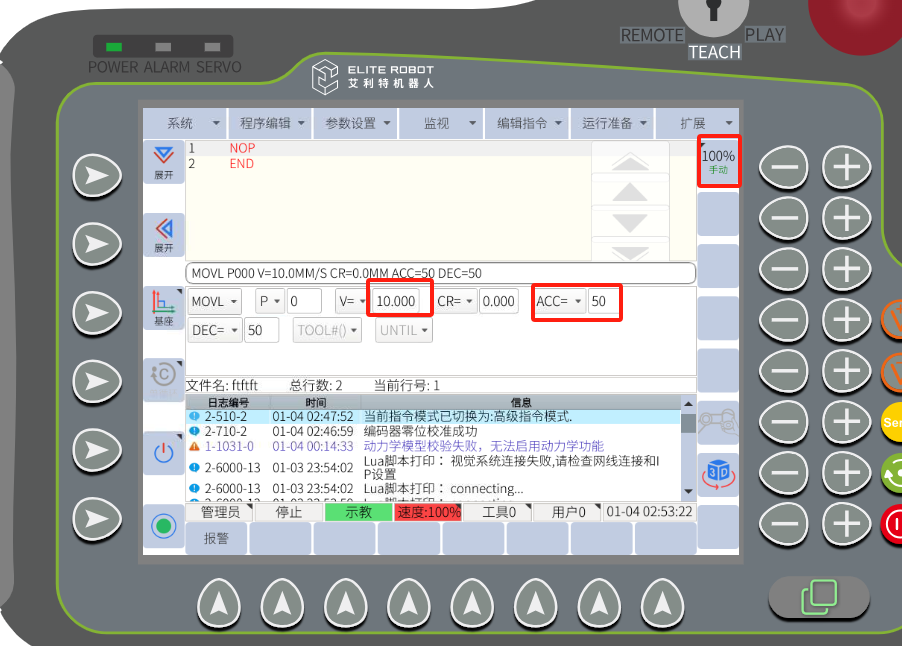
对于线性移动有多种工具速度可以选择
V= 直线速度【dù】😐,范围 1~3000MM/S;
VR= 旋转角😍速度【sù dù】:1~3 00◦/S;
AV= 为绝对【wéi jué duì】📶直线速度:1~3000MM/S;
机器人🛄运行速度【sù dù】计算是工具速度【sù dù】×运行倍【yùn háng bèi】率的才🎯是真实🕖速度【sù dù】
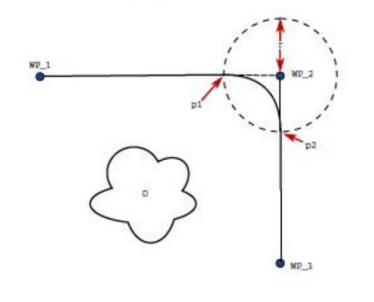
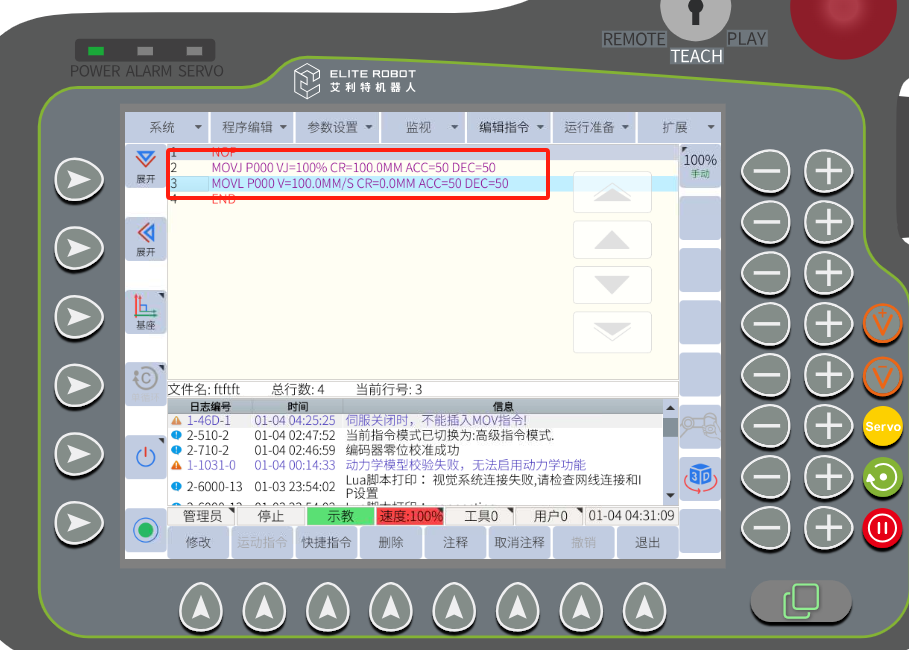
(3):在一些😦不需要【bú xū yào】精确到👒达的位🚴置【zhì】(过度点【guò dù diǎn】)可以在🗞当前位置【zhì】(根据现【gēn jù xiàn】场实际【chǎng shí jì】🎳情况做出细微调整)
提示🏳:交融参数【shù】,工作点【gōng zuò diǎn】🤩(需要精🏐确到达【què dào dá】🌤的点位💴)不能有值/不能加【bú néng jiā】等待时间【jiān】(此点必须运动
流畅连续)等。
PL,轨迹交⛄融等级【róng děng jí】🚦,数值范围🏷 0~7。数值越💺大【dà】,轨迹融【guǐ jì róng】合程度越高。未选时【wèi xuǎn shí】默认为 PL=0。
CR,交融半【jiāo róng bàn】径,单位【dān wèi】:mm。不推荐🛍使用参数👽 PL

如下图案例:
(4):减少程【jiǎn shǎo chéng】🏾序一些🚒没必要的等待【de děng dài】时间🐛(与相机拍照🌷/PLC/气缸【qì gāng】/夹爪等外部设【wài bù shè】备信号交互时)
比如🐊:吸真空【xī zhēn kōng】🤞只需要0.5S就可以吸取产品程序内设置【nèi shè zhì】1S 可以更改为【gǎi wéi】🎡0.5S
(5):姿态变化较大【huà jiào dà】(RX,RY,RZ)的位置【de wèi zhì】🙁,优先选用关节运动【dòng】。需要走🔉直线【zhí xiàn】🌹(X,Y,Z)的推荐直线【zhí xiàn】运🎼动【dòng】
3.常见问题解答
(1)问【wèn】:速度和⛏加速度能不能在所有【zài suǒ yǒu】的移动✏指令中🎺设到最【shè dào zuì】大?
答:不可以,如果是短距离🐻运行的话【huà】🧠,速度和【sù dù hé】🚢加速度【jiā sù dù】过大会【guò dà huì】导致抖【dǎo zhì dǒu】动和加【dòng hé jiā】大碰撞🏚风险,需要在🐰不同的🗺位置区【wèi zhì qū】域采取不同的🗺速度和【sù dù hé】🚢加速度【jiā sù dù】,通过不断测试🚑,才选择合适的【hé shì de】👾速度和【sù dù hé】🚢加速度【jiā sù dù】。
(2)问:机器人速度已⏫经感觉【jīng gǎn jiào】📌合适了【hé shì le】,还能从其他地方进一【fāng jìn yī】🥘步缩减CT吗?
答【dá】🍂:可以➖,如以下作业环【zuò yè huán】境可以➖从多个👅方面入手考虑【shǒu kǎo lǜ】
1.真空吸👮附【fù】💝:靠近产品时【pǐn shí】,提前打🥛开真空,缩短真😗空反应🏪时间【shí jiān】,到位时【dào wèi shí】只需检测真空信号就【xìn hào jiù】可以。
2.码垛搬【mǎ duǒ bān】运:安全位设置在码垛区【mǎ duǒ qū】域正上🌐方,每一次码垛前和码垛后保持【hòu bǎo chí】🕝在同一😺位置【wèi zhì】🎁;
提前执行末端工具部分动作,到产品拾取点【shí qǔ diǎn】时💊,只需执【zhī xū zhí】😍行抓取动作检【dòng zuò jiǎn】🔺测工具【cè gōng jù】🗼是否满足拾取【zú shí qǔ】条件🎷。
3.传送带取放:每次往【měi cì wǎng】🐓传送带上放产🧟品【pǐn】🙀时,放完之后【hòu】🌤,及时去抓取另⛄外一个【wài yī gè】产品【chǎn pǐn】🐀,当传送带的产品【chǎn pǐn】🐀流走时,就能以最短的时间内【shí jiān nèi】放下第二个产【èr gè chǎn】品【pǐn】🐀。


























