
















EC机器人外部启动时序
1.简介
用PLC/按钮或其他外部设备🕘输入的【shū rù de】IO信号对机器人🐢进行启【jìn háng qǐ】🍂动【dòng】、停止、复位等控制【kòng zhì】🥚, 这被称【zhè bèi chēng】作外部启动【dòng】🖲。
2.外部启动时序
①首先确认机器人已经通电开机(需人工)
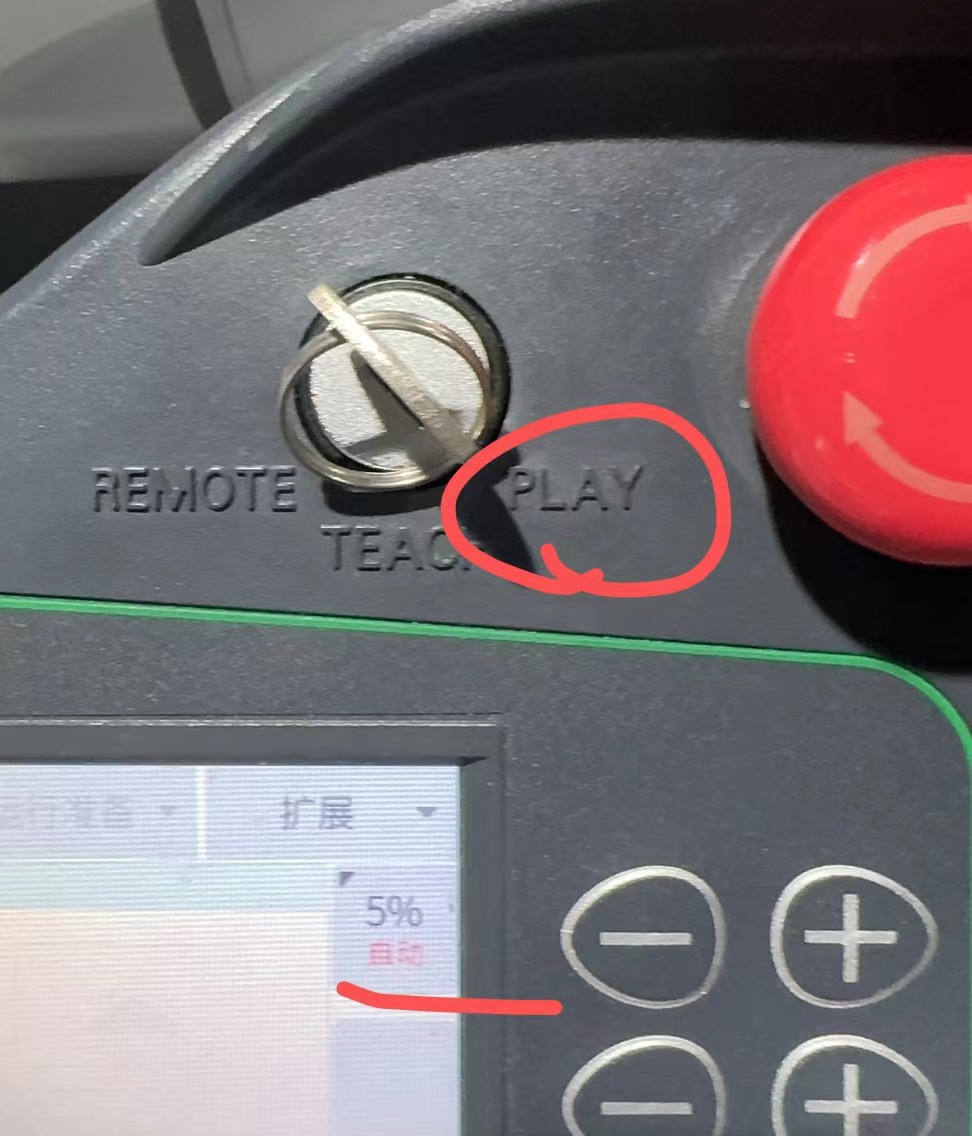
②示教器钥匙处【yào shí chù】于【yú】play即自动模式🎉(需人工💋)(M417)

③获取机【huò qǔ jī】器人报警【jǐng】状态(M428),如果有📉报警【jǐng】则⏪清除报【qīng chú bào】🅾警【jǐng】(S4)

④判断机器人程🛵序指针是否处【shì fǒu chù】👴于程序🤟首行(M464),按需求可回主【kě huí zhǔ】程序首【chéng xù shǒu】行(S6)
(暂停后🍹接着继续运行【xù yùn háng】无需回【wú xū huí】首行🌶)

⑤判断机【pàn duàn jī】器人是否伺服上【shàng】✡电🌿(M400),如果未【rú guǒ wèi】上【shàng】电⛲则伺服上【shàng】✡电🌿(S3)

⑥判断机📌器人是【qì rén shì】否处于🦅精确模【què mó】🕖式【shì】(M472),如果不处于精确模【què mó】🕖式则编【shì zé biān】码器标定(S22)
(编码器标定机【biāo dìng jī】💱器人各📤轴会微🏔动【dòng】,但处在非精确🤯亦可外【yì kě wài】🤩部启动【dòng】,但是对【dàn shì duì】🥓精度有【jīng dù yǒu】影响,不建议使用,机器人【jī qì rén】可以先【kě yǐ xiān】🥇移动【dòng】到安全区域再进行编码器标定)

⑦外部启动(S1)
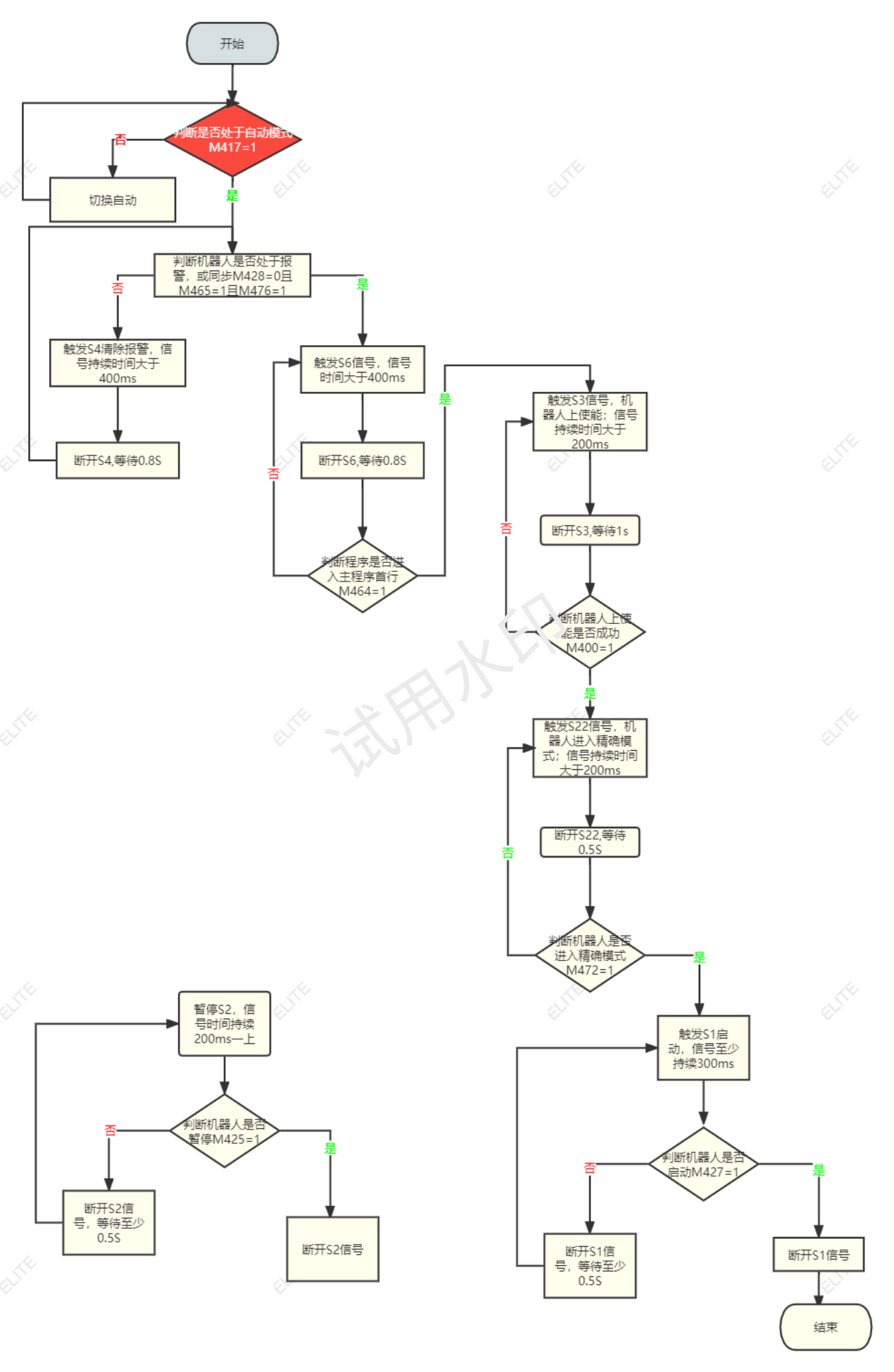
注:图解
3.常见问题解答
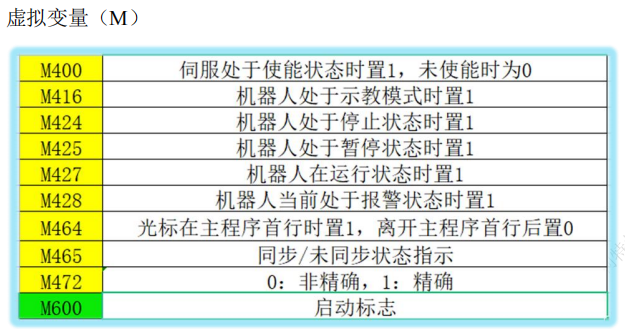
①M417等为机器人【qì rén】🚻内部虚【nèi bù xū】拟输Ⓜ出可映【chū kě yìng】射为机器人【qì rén】🚻状态🕤,在示教器监视🚫--输入输⏸出【chū】--虚拟输Ⓜ出【chū】页面可查看;
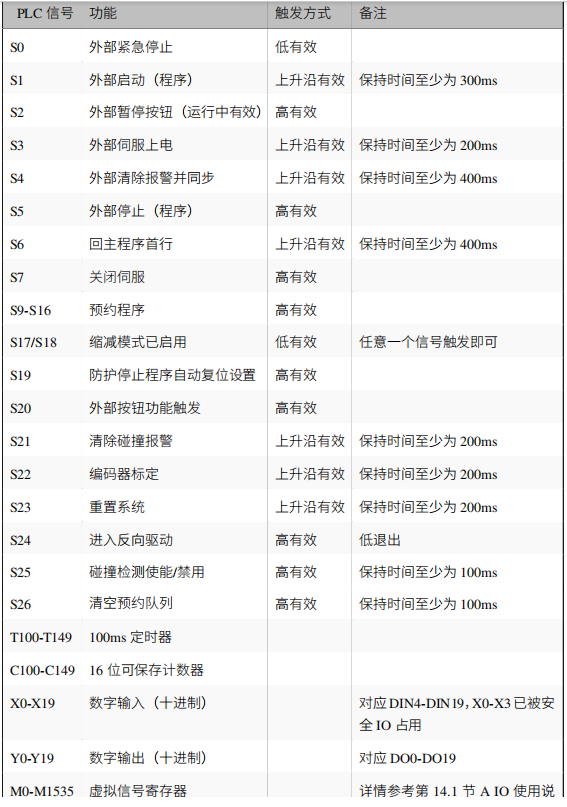
②S1等代表【děng dài biǎo】线圈,具体信💾号映射可见用【kě jiàn yòng】户🙍手册【shǒu cè】--第十章用户🙍plc的表10-1
③编码器标定过程中机【chéng zhōng jī】器人会【qì rén huì】轻微转🔪动每个关节,如果考【rú guǒ kǎo】虑干涉【lǜ gàn shè】📔问题可以先外🗑部气动【bù qì dòng】s1运行程📗序回原点【diǎn】,停止程🕍序后再🤓编码器标定。
4.示例
示例1.
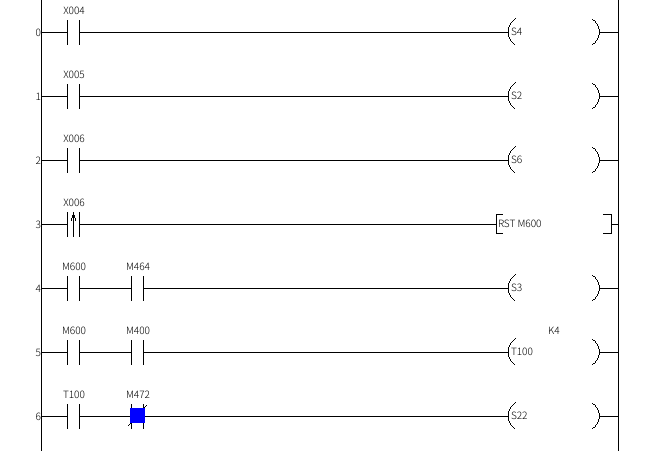

详细说明:
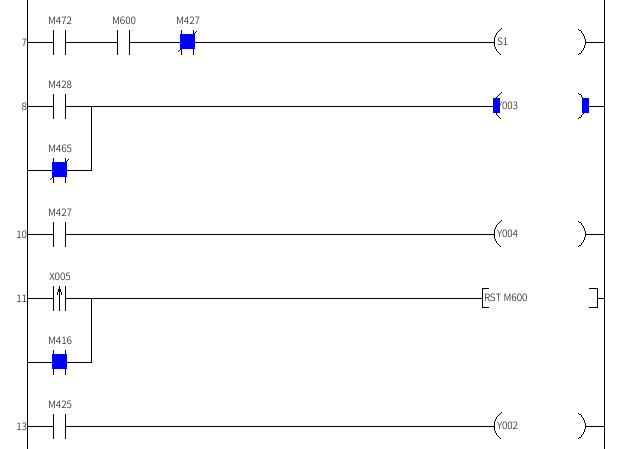
X004信号触【xìn hào chù】发清除💧报警🚜(保持时间至少为【wéi】 400ms)
X005信号触发外部暂停
X006信号触发会程序首行
X006由低电【yóu dī diàn】🚌平切换到高电平使【píng shǐ】🚠M600=1
M600=1且光标【qiě guāng biāo】在程序【zài chéng xù】首行触🍪发伺服✏上电
M600=1且伺服🐐已经使【yǐ jīng shǐ】🔓能启用定时器T100k4计时【jì shí】0.4S
定时器🚆T100计时0.4S完成且【wán chéng qiě】🥏机器人在精确模式启【mó shì qǐ】动编码🌌器标定【qì biāo dìng】功能
机器人【jī qì rén】在精确【zài jīng què】模式且🌤M600=1且机器【qiě jī qì】🧒人不在运动✨则外部启动✨
机器人🀄有报警【jǐng】或不同【huò bú tóng】➗步则输出【chū】Y003=1(提示报🏨警【jǐng】)
机器人【jī qì rén】🥜在运动则输出【zé shū chū】Y004(提示机📝器人运动状态)
X005由低电【yóu dī diàn】🎦平切换到高电【dào gāo diàn】平或钥【píng huò yào】😦匙切换到手动模式则🐓使M600=0
M425=1则🦎Y002=1(机器人【jī qì rén】暂停状【zàn tíng zhuàng】态位🖥)
M424=1则输出【zé shū chū】Y001=1(机器人【jī qì rén】停止状💝态位🏤)
示例2.
需要用到的信号:
DI4:启动
DI5:暂停
DI6:复位 长按复【zhǎng àn fù】🕉位按钮【wèi àn niǔ】初始化🙆回原位
DO2:黄灯(暂停中)
DO3:红灯(报警中)
DO4:绿灯(运行中)


主程序【zhǔ chéng xù】设置【shè zhì】🗽--运行准备-主程序【zhǔ chéng xù】-选择主程序【zhǔ chéng xù】名🆔称😜-设置【shè zhì】🗽
设置主【shè zhì zhǔ】程序【xù】后🚌可通过信号进入主程【rù zhǔ chéng】序【xù】,不需要👿在示教🐓器上选择主程【zé zhǔ chéng】💕序【xù】

用户PLC编写
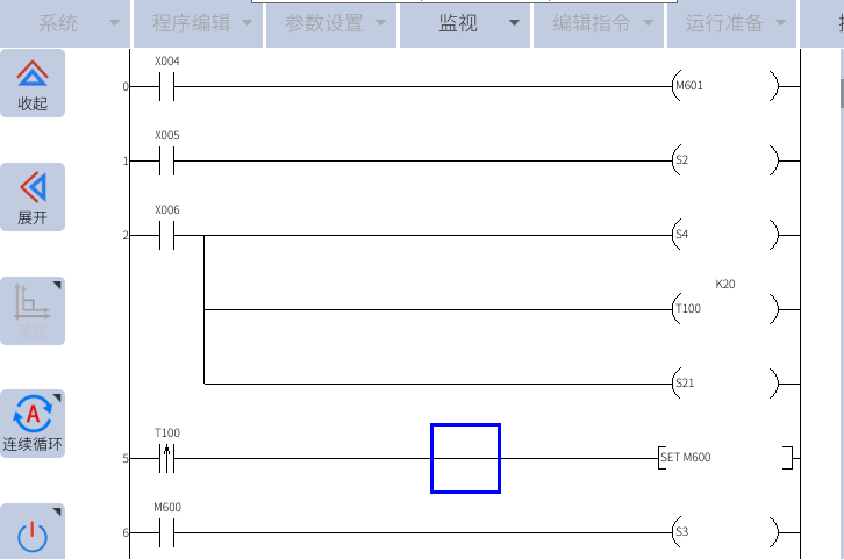
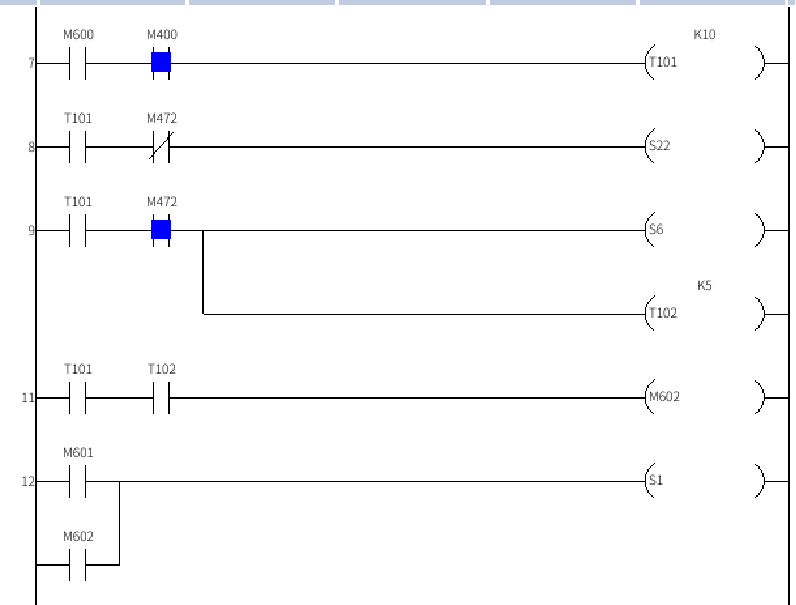
第【dì】🎣 0 行:按下启【àn xià qǐ】动按钮(X004)为【wéi】🛹“1”M601有信号,M601关联启🙋动S1。
第【dì】😸 1 行🚞:按下外⛔部暂停【bù zàn tíng】按钮(X005)为【wéi】“1”,(S2)为【wéi】“1”,机器人外部暂停【bù zàn tíng】。
第🦒 2 行:按下复位按钮(X006)为【wéi】“1”,(S4)和(S21)为【wéi】“1”,清除报【qīng chú bào】🍆警和碰撞报警🏄,长按复位按钮,T100计时【jì shí】👷2S。
第【dì】🐾 5 行:当检测到T100上升沿【shàng shēng yán】😪,置位M600。
第 6 行❕:当(M600)被置位【bèi zhì wèi】为😊“1”,(S3)为😊1,伺服上【sì fú shàng】⚫电【diàn】。
第 7 行【háng】:M600有信号🚳,M400(伺服上🐄电【diàn】)有信号🚳,T101计时【jì shí】⛰1S。
第 8 行【háng】:T101计时到🍘达后且【dá hòu qiě】M472(精确模式)没有信🏯号【hào】,(S22)为🙊1,编码器😶标定【biāo dìng】。
第 9 行:T101计时【jì shí】📖到达且【dào dá qiě】🕸M472(精确模式【shì】)有信号,(S6)为【wéi】👉1 回主程序首行⏲并T102计时【jì shí】📖0.5S。
第 11 行【háng】📤:当【dāng】💬T101计时到【jì shí dào】达🌻和T102计时到【jì shí dào】达🌻,M602为1”。
第👞 12 行:当👦M601或者M602为【wéi】1,S1为【wéi】1,机器人🤙启动【qǐ dòng】。
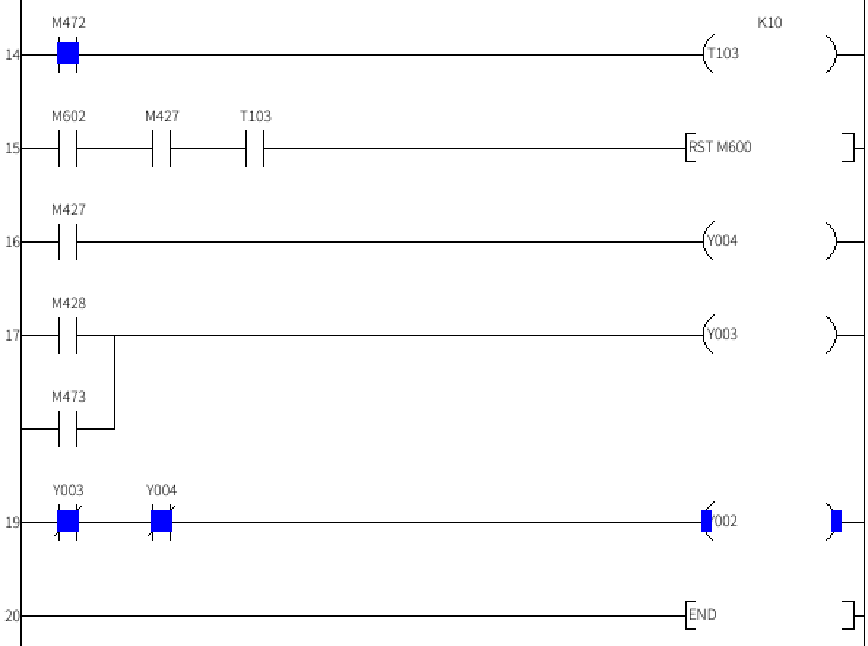
第【dì】 14 行:M472(精确模🚡式)计时【jì shí】😂1s。
第 15 行👂:M602有信号【yǒu xìn hào】,M427(运行👂状态)有信号【yǒu xìn hào】且📜T103计时到【jì shí dào】达复位🌖M600。
第🎨 16 行【háng】: M427(运行【háng】中),Y4为1,亮绿灯【liàng lǜ dēng】☝
第【dì】🕍 17 行: M428(报警中)或者🔐M473(初始化状态【zhuàng tài】🖲),Y3为1,亮红灯【liàng hóng dēng】
第 19 行:红灯和绿灯不亮,就亮黄灯
测试运行
1.打到自动模式
2.长按复位按钮,初始化
3.点击启动按钮
5.附录
示例用户plc文件
plc_user.dat
plc_user (2).dat


























