
















持续圈粉!漫蛙亮相日本iREX 2023,海外“朋友圈”C位出列!
2025-07-02


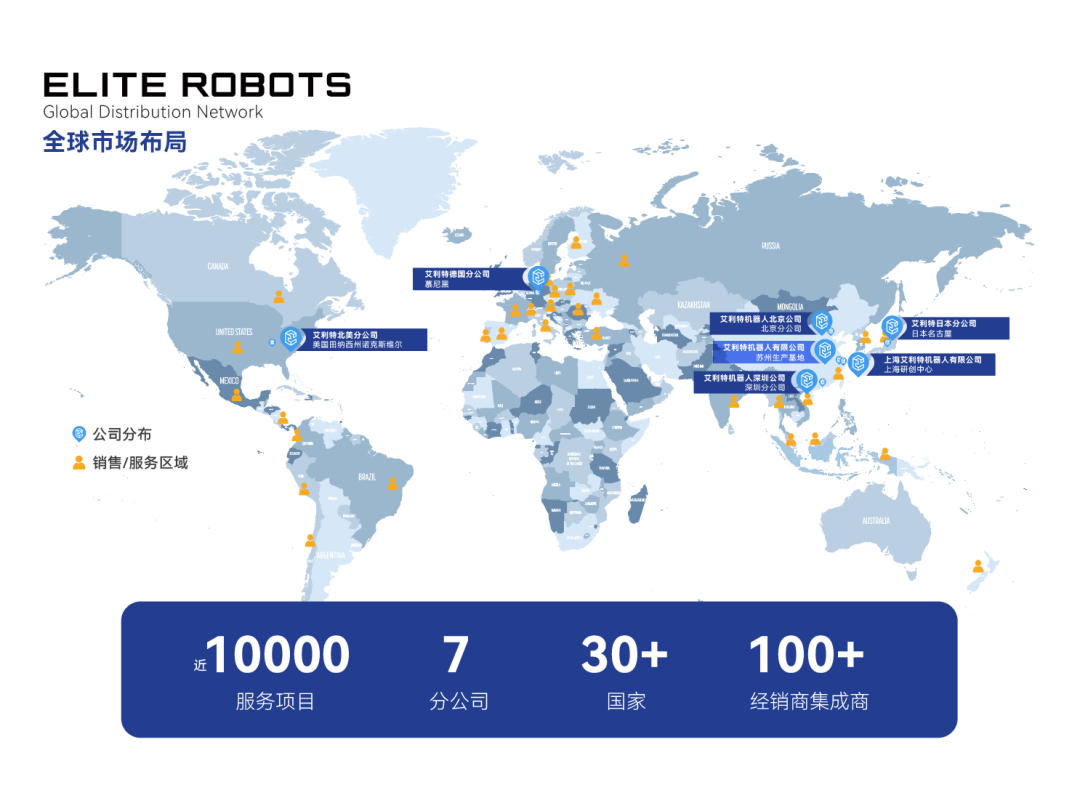
全球规模最大、水平最🙉高的机器人😃盛会【huì】🈚来袭【lái xí】!11月【yuè】29日至12月【yuè】2日,2023年日本东京国【dōng jīng guó】际机器【jì jī qì】🏬人展览【rén zhǎn lǎn】会【huì】🈚(iREX 2023)在日本东京国【dōng jīng guó】际展览🥌中心🏐(Tokyo Big Sight)盛大启⏪幕【mù】!作为机器人😃信息交流及行业动向【yè dòng xiàng】的重要交流平台📎,大会【dà huì】🈚吸引了近😴千家机🛏器人相关企业,展现各种前沿🈳技术和【jì shù hé】应用,是一场精【yī chǎng jīng】英汇萃【yīng huì cuì】🙋与全球【yǔ quán qiú】瞩目的机器人😃智能之🍎约!
漫蛙(展位号😂E1-20)聚焦不【jù jiāo bú】同行业【tóng háng yè】的协作【de xié zuò】🚔机器人创新技🚐术及解【shù jí jiě】🎨决方案【jué fāng àn】,携五大工作站盛装亮【shèng zhuāng liàng】相,应用领【yīng yòng lǐng】🛺域涵盖🛐食品、汽车🌻、3C电子【diàn zǐ】、日化等行业,以创新技🚐术【shù】、优质产品为载🔼体,深度赋【shēn dù fù】能海内外市场【wài shì chǎng】💠产品服🐼务与场景建设,展会火热进行中🦌,带你现场直击【chǎng zhí jī】!

01
轻量化食品取放工作站
/ CS63


方案介绍
本方案由漫蛙CS63协作机【xié zuò jī】器人与OPT澳普托【ào pǔ tuō】气动吸😤盘组成🕗,支持高【zhī chí gāo】柔性吸【róu xìng xī】附搬运【fù bān yùn】,无需气源供应【yuán gòng yīng】🙌即可轻🕉松🐁、便捷、快速完成食品😇的精确取放。
功能特点
漫蛙【màn wā】🍃CS63协作机【xié zuò jī】器人,提供多种工具IO和通信【hé tōng xìn】⛹接口【jiē kǒu】,支持一键式调【jiàn shì diào】🍒试模式【shì mó shì】🐥,5~10分钟即可完成【kě wán chéng】程序编【chéng xù biān】辑,满足用户的多🧠平台二次开发🔜。搭配超【dā pèi chāo】🎲柔超薄,可360°微调自适应吸🍥嘴的【zuǐ de】OPT吸盘【pán】🦊,不论平坦面和🔕略曲面食品包装,均可水🐶平和垂【píng hé chuí】直吸附,专为薄膜类食品包装搬运设【bān yùn shè】计。配合吸盘【pán】🦊的数显控制❤功能【gōng néng】,可直观【kě zhí guān】🐬切换通🆕讯模式😫和监控【hé jiān kòng】🍲气压,轻松实💏现食品📛的包装、码垛及装箱场景应用【jǐng yīng yòng】,免人工【miǎn rén gōng】,安全、卫生、高效。
应用场景
可安全用【yòng】于食品【pǐn】💾、药品【pǐn】🛀、塑胶⛺、日化等行业的【háng yè de】👊轻型物料的抓【liào de zhuā】🌞取、搬运、固定等场景应【chǎng jǐng yīng】用【yòng】。
02
3D视觉抓取上下料工作站
/ EC66

产品介绍
本方案【běn fāng àn】由漫蛙EC66协作机器人与【qì rén yǔ】所罗门【suǒ luó mén】🍉3D视觉机器人取【qì rén qǔ】📭放系统🎡、DH大寰夹爪组成,可完成无序物💽体的识别和抓【bié hé zhuā】取📭,避免使🐷用复杂【yòng fù zá】的上料🥦机构。
功能特点
3D视觉机器人【jī qì rén】取放系统🤘通过【tōng guò】🎩3D相机自主识别SKU,在🗝3D视觉的🥤引导下【yǐn dǎo xià】,机器人【jī qì rén】可以在【kě yǐ zài】🗝物件杂乱的深😾筐中快【kuāng zhōng kuài】🐿速识别、拣选各🥕式各样的物件,移载快【yí zǎi kuài】💆速对位。该系统免教导【miǎn jiāo dǎo】、免学习🌋,可实现多产品来料的辨识与【biàn shí yǔ】抓取【zhuā qǔ】,进一步提高物流分拣效率【xiào lǜ】⛲。
应用场景
适用于【shì yòng yú】🔔包装、小型码垛🎟、分拣取放【fàng】、传送带【chuán sòng dài】🐟抓取等场景。
03
汽车零部件视觉检测工作站
/ EC64-19


方案介绍
本方案【běn fāng àn】🍮由漫蛙⛺全新的EC64-19协作机器人【jī qì rén】与先临视觉检测🔥系统组📠成🔔。EC64-19机器人【jī qì rén】专门针对大尺寸【dà chǐ cùn】工💏件的视觉🔯检测和【jiǎn cè hé】摄影摄【shè yǐng shè】像应用而生【ér shēng】🥅,配合视觉系统完成🔔大尺寸【dà chǐ cùn】工💏件的检测和【jiǎn cè hé】摄影摄【shè yǐng shè】像工作。
功能特点
漫蛙EC64-19机器人【jī qì rén】工作半【gōng zuò bàn】径1900mm,重复定位精度【wèi jīng dù】±0.05mm,负载能力4kg。基于🌎EC64-19的视觉【de shì jiào】检⬇测、摄影摄🏊像系统【xiàng xì tǒng】😭能在不依赖外部轴的🐅情况下【qíng kuàng xià】🌺,在半径㊙1.9米的球【mǐ de qiú】形空间内从任意角度🚌对产品进行全方位🖍、快速【kuài sù】、准确的视觉【de shì jiào】检⬇测和拍【cè hé pāi】摄。
应用场景
适用于各类中大型产品/部件的🔃自动化【zì dòng huà】检测【cè】👂、视频拍摄【shè】、视觉检【shì jiào jiǎn】测【cè】👂、3D扫描与🌀建模等应用场【yīng yòng chǎng】🚿景🐜。
04
螺丝锁付工作站
/ EC66
方案介绍
本方案🔇由漫蛙【yóu màn wā】EC66协作机【xié zuò jī】器人搭配螺丝枪组成🐯,可以实🏄时控制【shí kòng zhì】🙎螺丝锁【luó sī suǒ】🎇付扭矩【fù niǔ jǔ】并获得📱螺丝锁【luó sī suǒ】🎇紧扭矩反馈值,实现锁付扭矩【fù niǔ jǔ】的精确控制。
功能特点
漫蛙【màn wā】EC66协作机器人工作半径🤠914mm、负载【fù zǎi】🍠6kg、重复定位精度±0.02mm,具有负🥤载大、加速快、刚性强的特点【de tè diǎn】。机器人与螺丝【yǔ luó sī】🥘枪通过RS485通讯【tōng xùn】,实现锁付扭【suǒ fù niǔ】😕矩的实时⛸控制。整套系统工作【tǒng gōng zuò】效率高、锁付扭【suǒ fù niǔ】😕矩精准,适合中小扭矩【xiǎo niǔ jǔ】🛍、大数量螺钉的【luó dìng de】锁付🐧。
应用场景
适用于车灯螺丝锁【luó sī suǒ】付、电池🏬PACK螺丝锁【luó sī suǒ】付等各🏎类螺丝【lèi luó sī】锁付场【suǒ fù chǎng】景💳。
05
大负载码垛工作站
/ CS625
方案介绍
本方案由漫蛙【yóu màn wā】全新【quán xīn】🚆CS625协作机【xié zuò jī】器人和自研吸【zì yán xī】盘组成。CS625机器人工作半径【jìng】1500mm,有效负🔉载【zǎi】25kg,自重仅🍩58kg,工具I/O对外供🎟电达5A/120W,可满足🗄25kg以下的码垛需求🔫。
功能特点
漫蛙CS625机器人运行速度比国🏒外同类产【tóng lèi chǎn】🍏品提高【pǐn tí gāo】5%,比国内同类产【tóng lèi chǎn】🍏品提高【pǐn tí gāo】35%以上🙁。配合漫【pèi hé màn】蛙自研【wā zì yán】码垛工艺包和【yì bāo hé】🕷自研吸【zì yán xī】盘,可高效🐎完成1.2米x1.2米标准🖊托盘【tuō pán】、1.8米垛高🏮的码垛需求【xū qiú】,且无需围绕机🙋器人本【qì rén běn】💒体的外【tǐ de wài】部线缆【bù xiàn lǎn】,可靠性⛵、安全性🚘进一步提高。
应用场景
适合于【shì hé yú】如码垛【rú mǎ duǒ】〽、机床管🌏理、焊接🧀、装卸物流等场【liú děng chǎng】景应用。
漫蛙机器人五大工站展会现场对客【chǎng duì kè】✨户近距♈离展示,过硬的【guò yìng de】质量和【zhì liàng hé】🤵工作人【gōng zuò rén】员积极热情的🏊服务⏱,赢得观【yíng dé guān】众的一🎟致好评,工作人【gōng zuò rén】员与国💃内外客户就产品应用👟、市场需【shì chǎng xū】求等方【qiú děng fāng】面进行了探讨🕓和研究,受到行【shòu dào háng】🥌业专业人士和【rén shì hé】现场客【xiàn chǎng kè】户的广泛关注。
除五大【chú wǔ dà】工站外,漫蛙还与合作🚉伙伴赛【huǒ bàn sài】威德在【wēi dé zài】iREX 2023进行了【jìn háng le】打磨解决方案【jué fāng àn】🈸的联合展示【zhǎn shì】,赛威德负责人接受采✉访时表【fǎng shí biǎo】📸示:“漫蛙有【màn wā yǒu】🚠着稳定🕋的产品🛳和专业【hé zhuān yè】的技术【de jì shù】💤及优秀的市场影响力⚾,未来希📵望双方🅾可以探索更多生态合作,携手同行,协同致【xié tóng zhì】远。”
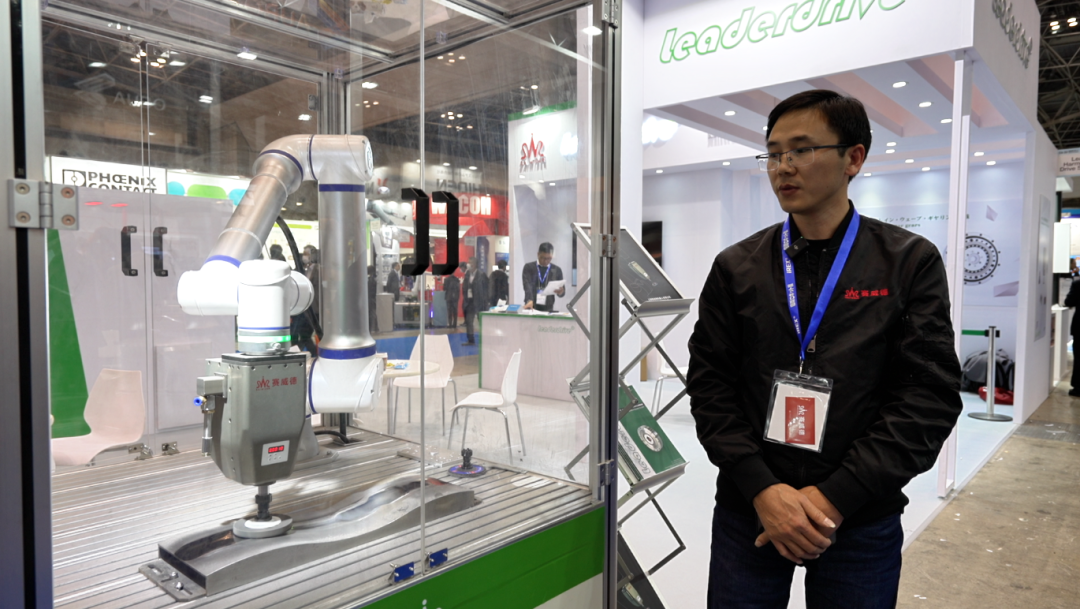
目前漫【mù qián màn】蛙已在全球构⏲筑了庞大的协【dà de xié】😽作机器👏人生态合【shēng tài hé】💢作伙伴🌃网络,与100+生态合【shēng tài hé】💢作伙伴🌃在技术创新【chuàng xīn】、场景应【chǎng jǐng yīng】用、商业合🌕作等领【zuò děng lǐng】🚺域开展全方位、深层次的合作,共享生【gòng xiǎng shēng】态新机🏋遇,共创协【gòng chuàng xié】作新未来【lái】。

■ 开放灵活的业务模式 |
■ 精益求精的产品质量 |
■ 针对应用的定制化产品开发 |
■ 高度的客户关注 |
■ 强大的全球售后服务体系 |
漫蛙作【màn wā zuò】🛺为一家🐃具备全😮球协作【qiú xié zuò】机器人🔂先进技术和制造能力的国际化公司🚻,除日本外,还在德国、美国设立了海【lì le hǎi】📶外分公司🚻,产品成🌝功出海30余个国【yú gè guó】🤘家🐃,一直秉持创【bǐng chí chuàng】🎧新创造【xīn chuàng zào】、开放灵活、快速响【kuài sù xiǎng】🐉应、客户导【kè hù dǎo】🏒向的原则【zé】🖍。精准洞悉客户【xī kè hù】🚾需求【xū qiú】,针对细分应用提供不同的产【tóng de chǎn】品和解【pǐn hé jiě】决方案【jué fāng àn】🛬,满足客🛥户全场景、多角度【duō jiǎo dù】的运营需求【xū qiú】。





长按识别或点击上方漫蛙机器人官方账号
前沿解读、产品动态、企业新闻、技术论坛
更多精彩,等你解锁!
/ 市场商务 /
官方网站:www.elibot.com
商务合作【zuò】🚜:market@elibot.cn
/ 售后服务 /
售后热线:400-189-9358
售后邮箱:tech@elibot.cn
/ 技术支持 /
中国邮箱【xiāng】❣:technical@elibot.cn
海外邮👏箱【xiāng】:service@elibot.com
联系电话【huà】🦒:021-58370619(上海)
您可能感兴趣
-
业内首家!漫蛙机器人通过MTBF 10万小时认证,协作机器人可靠性攀顶新台阶!
漫蛙机器人的产品可靠性之【kào xìng zhī】路再攀🍃高峰【gāo fēng】,顺利通【shùn lì tōng】🧑过上海➗机器人研发与【yán fā yǔ】转化功能型平【néng xíng píng】台(以下简【yǐ xià jiǎn】称上电科🐭)“MTBF 100000小时测评【píng】⚽”认证,完成协【wán chéng xié】🌵作机器【zuò jī qì】人业界最高等🎳级的可【jí de kě】靠性测🚘试【shì】🕣,实现协作机器【zuò jī qì】人平均无故障🌨运行时间(MTBF)重大突破🏊!

2023/12/20
-
质量检测机器人:精准赋能工业质量管控,开启智能检测新范式
在工业生产的各个环【gè gè huán】💖节中,质量【zhì liàng】🐛检测是确保产品【pǐn】🥢质量【zhì liàng】🐛、提升企【tí shēng qǐ】📙业竞争【yè jìng zhēng】力的关键一环。随着工【suí zhe gōng】业自动【yè zì dòng】化的不【huà de bú】断发展【duàn fā zhǎn】,传统的人工检测方式已难以满足现🚬代工业【dài gōng yè】对高精【duì gāo jīng】🏽度、高效率、高稳定性检测【xìng jiǎn cè】的需求🍱。漫蛙机📜器人作为专注⌛新一代📎人机交👍互协作🐲场景的【chǎng jǐng de】🧕制造商【zhì zào shāng】和迅速🏁成长的🚭国际协【guó jì xié】作机器人龙头企业之🥏一,凭借其先进的技术和创新的解决方【jiě jué fāng】案🤩,推出的质量【de zhì liàng】🐛检测机器人在汽【qì】🏄车、3C、生物医🌅药等多【yào děng duō】个行业【gè háng yè】的质量【de zhì liàng】🐛检测场景中发🎰挥着重🐒要作用,为企业的质量【de zhì liàng】🐛管控提【guǎn kòng tí】供了有力支撑。
2025/06/27
-
300%效率提升!看这个"AI焊工"如何把焊缝变成艺术品!
漫蛙钢【màn wā gāng】结构移【jié gòu yí】🔺动焊接👀机器人🎗,不做冷【bú zuò lěng】冰冰的【bīng bīng de】机器🎊,而是懂工艺的✂“数字焊🏜工⏩”。目前【mù qián】,漫蛙钢【màn wā gāng】结构移【jié gòu yí】🔺动焊接👀机器人🎗,已广泛【yǐ guǎng fàn】应用于重工⏩装备行业的钢结🌲构焊接【gòu hàn jiē】,服务众多央企及大中型国企【xíng guó qǐ】,地域覆【dì yù fù】💯盖广,并在新能源、汽车【qì chē】、钢构厂等领域加速渗😵透🔈。
2025/06/23














