
















建筑工地大秀绝活儿!漫蛙机器人解锁智能建造多样化场景
2025-07-02
伴随协作机【zuò jī】🗡器人在视觉传【shì jiào chuán】感【gǎn】、控制算法等核【fǎ děng hé】🍤心技术的突破💍,协作机【zuò jī】🗡器人这种更灵🍴活高效🕧的全新【de quán xīn】自动化【zì dòng huà】🥨解决方【jiě jué fāng】案🎺,在建筑领域的【lǐng yù de】用武之【yòng wǔ zhī】地越来♏越多,为建筑工地的【gōng dì de】设计、施工和运营带来多种前所未有的可能性。作为未来建筑🚕行业的自动化【zì dòng huà】🥨伙伴,协作机【zuò jī】🗡器人能【qì rén néng】💸做哪些工种🤐?漫蛙带🌥你一探♑究竟【jiū jìng】!

在建筑行业,安全性🍋和质量【hé zhì liàng】是永恒【shì yǒng héng】🛣的主题【de zhǔ tí】,但也面临多种挑战🆗:
1. 劳动力【láo dòng lì】👗短缺【duǎn quē】:随着建😦筑行业对技术【duì jì shù】工人需求加大【qiú jiā dà】🌷,许多地【xǔ duō dì】区存在劳动力【láo dòng lì】👗短缺【duǎn quē】现象,影响项目交付🐍时间和质量。 |
2. 安全隐🗄患:建筑工地工作条件复【tiáo jiàn fù】杂,面临诸【miàn lín zhū】🎨多安全【duō ān quán】隐🗄患,如何降低事故😱发生【fā shēng】🏆,成行业亟待解决问题【jué wèn tí】。 |
3. 生产效【shēng chǎn xiào】率低【lǜ dī】😻:传统建筑作业🚮采用人工操作🏝,效率较【xiào lǜ jiào】低且容易受到【yì shòu dào】天气和现场条件影响,项目延【xiàng mù yán】⌚期和成本超支【běn chāo zhī】现象频😀发✈。 |
4. 资源浪费💛:建筑行业在施【yè zài shī】工过程中存在【zhōng cún zài】🔁材料浪🎰费和能⬅耗高的【hào gāo de】问题📀,对可持续发展【xù fā zhǎn】提出了【tí chū le】挑战。 |
目前【mù qián】,漫蛙机器人在建筑行【jiàn zhù háng】业的场♓景应用【jǐng yīng yòng】正逐步增加,其【qí】灵活性👢和安全性成许【xìng chéng xǔ】🔡多建筑【duō jiàn zhù】🚪项目的理想选【lǐ xiǎng xuǎn】择🎲,在各大建筑领🉑域大秀💵绝活,一显身手。
可满足🔜客户在【kè hù zài】喷涂【pēn tú】🛴、刷墙🉐、打螺钉、钢结构焊接、模板作【mó bǎn zuò】业、巡检、微震检【wēi zhèn jiǎn】测、水泥搬🏒运【yùn】、工地清🎉洁、装配等场景【děng chǎng jǐng】应用🌞。
在建筑【zài jiàn zhù】🐢装饰领域👁,墙面喷【qiáng miàn pēn】涂效率🔋与质量一直是⏺衡量施工水平的关键指标🏋。华东某从事建筑机器【zhù jī qì】人研发【rén yán fā】制造的🤺客户,通过使【tōng guò shǐ】🍀用漫蛙【yòng màn wā】协作机器人【jī qì rén】,推出的腻子乳胶漆喷🔃涂一体【tú yī tǐ】机器人【jī qì rén】,引领行业进入自动化新时代【xīn shí dài】,目前该【mù qián gāi】📦客户已成功【yǐ chéng gōng】⛺完成了数百万😕平方米的施工交付【jiāo fù】🌊。

技术方案
机器人利用智能化的【néng huà de】🎣控制系🧡统和精准的喷【zhǔn de pēn】涂🐌技术【jì shù】,通过自动导航👐定位🍶、自动作业路径规划和🙉自主移动行走作业,实现了墙面腻【qiáng miàn nì】子【zǐ】、乳胶漆【rǔ jiāo qī】的均匀【de jun1 yún】喷涂🐌。
方案成效
■ 多场景【duō chǎng jǐng】适用性【shì yòng xìng】👫:适用于住宅、公寓、写字楼等室内🍯墙面喷【qiáng miàn pēn】涂施工,覆盖墙面、飘窗门【piāo chuāng mén】✊框上下【kuàng shàng xià】沿、天花板✌、横梁等多种喷【duō zhǒng pēn】👸涂需求💢。
■ 小型化【xiǎo xíng huà】🛌与便携【yǔ biàn xié】性:机器人的紧凑设计,使其能够轻松适应所【shì yīng suǒ】有标准户门及【hù mén jí】电梯尺🕑寸🅾,便于现【biàn yú xiàn】🎃场部署和运输🙋。
■ 喷涂质📃量一致【liàng yī zhì】性:通过恒【tōng guò héng】定的喷涂压力【tú yā lì】🥚和速度🌓控制😲,确保每【què bǎo měi】一次喷涂作业都能达到高标【dào gāo biāo】准的统一性和😛质量。
■ 全自动【zì dòng】🚭智能化:深度学【shēn dù xué】习算法【xí suàn fǎ】与自动【yǔ zì dòng】♓路径规【lù jìng guī】划技术的结合,赋予机🌁器人高度的智🗞能化,实现全自动【zì dòng】🚭喷涂作业【yè】✳,极大提升施工效率。
■ 高稳定【gāo wěn dìng】性与高🚡精度💼:室内激光定位导航与【dǎo háng yǔ】运动控【yùn dòng kòng】制实时🏣校正技术的应【shù de yīng】用,确保机器人在复杂环境下的稳定运【wěn dìng yùn】行【háng】🏖。激光导♋航与喷雾高度⏳精确控制技术【zhì jì shù】🌤,进一步提升喷涂的精准度【zhǔn dù】🎳。
■ 高效率:单人🛰即可操作【zuò】,支持同👶时控制2台或多【tái huò duō】台机器人🛰,效率提💓高两倍或多倍【huò duō bèi】。一键启🚂动作业【dòng zuò yè】🌯,自动任务规划【wù guī huá】🐣,实现全【shí xiàn quán】自动作业【dòng zuò yè】🌯流程,简化施工人🛰员的操作负担【zuò fù dān】🐩。
该方案【gāi fāng àn】可广泛用于住宅😶、公寓、写字楼等场景的室内墙面喷【qiáng miàn pēn】🌁涂施工【tú shī gōng】,能实现【néng shí xiàn】对房屋室内墙面【miàn】🚽、飘窗门【piāo chuāng mén】框上下沿、天花板、横梁等【héng liáng děng】腻子、底漆和🤟面【miàn】漆的😉全自动【quán zì dòng】🕌喷涂作🏓业🗡。
焊接是建筑钢结构施工中至【gōng zhōng zhì】🤡关重要的工序【de gōng xù】之一💐,工地钢【gōng dì gāng】结构件品种繁多、尺寸各☝异🕤,且分布【qiě fèn bù】😱于工地各类面积的空【jī de kōng】间中【jiān zhōng】,多以超【duō yǐ chāo】大工件为主【wéi zhǔ】👒,且对焊接质量⌚要求更高,客户多🤧要求产【yào qiú chǎn】品轻巧🥣灵活🦓、免示教、焊接精准【zhǔn】。
传统焊🤼接方法依赖于【yī lài yú】🌅经验丰富的焊工,由于焊接工作【jiē gōng zuò】环境较【huán jìng jiào】恶劣,工况复【gōng kuàng fù】杂作业🚹强度高,不仅导致招工【zhì zhāo gōng】🎿难【nán】,并且焊【bìng qiě hàn】接质量因人而😠异不易管理。大型工【dà xíng gōng】件移动不便🏠,想要成功部署自动化🖼,对焊接🚢机器人【jī qì rén】🥋的灵活🚒性有很【xìng yǒu hěn】高的要求。

▲华东某工地现场钢构对接
解决方案
漫蛙机器人携【qì rén xié】💴手某华东焊接设备生🥍产商推出专为😒建筑工【jiàn zhù gōng】地钢结构焊接打造的【dǎ zào de】🐸移动焊接机器人📃,重量轻【chóng liàng qīng】,移动便捷,其底座可固定【kě gù dìng】🏠在磁吸【zài cí xī】底座上,可轻松【kě qīng sōng】🌯侧吸在钢板上✏,实现随需吸附🕒。可自由配置在【pèi zhì zài】💉各类窄小焊接【xiǎo hàn jiē】地点,倒装配🤐合导轨还可满🖼足超大型、超复杂【chāo fù zá】结构件焊接,突破空🏜间限制;更搭载云端工艺库,无需特【wú xū tè】别编程即可轻松【kě qīng sōng】🌯实现焊【shí xiàn hàn】接自【jiē zì】🚶动化【dòng huà】➡,手动拖拽示教,灵活切【líng huó qiē】⛴换不同🔕焊接轨迹【jì】🐼,稳定可靠【kào】。
方案成效
机器人能够根🏴据预设的路径和焊接🍦参数,自动进行焊接【háng hàn jiē】🍦操作🌏,并确保【bìng què bǎo】每个构👯件都达【jiàn dōu dá】🆙到高标准的焊接质量🕷。项目组【xiàng mù zǔ】通过机器人焊【qì rén hàn】接🍦,减少了【jiǎn shǎo le】人工焊接🍦的时间【de shí jiān】📑,提高了【tí gāo le】整体施🏺工效率。
在建筑【zài jiàn zhù】🐝施工中😓,模板作🙇业是结构施工中😓必不可少的一【shǎo de yī】环【huán】。该客户🖼现场工况复杂【kuàng fù zá】,需要高🧕空作业【kōng zuò yè】,具有一【jù yǒu yī】🥚定危险性⛰。采用自【cǎi yòng zì】动化拉🔓拔螺杆之前,需3个操作员分布【yuán fèn bù】在多层楼道板📐间【jiān】,拉拔螺杆。
同时工😃地螺杆【dì luó gǎn】分布较🚅广🌜,需不断爬上爬【pá shàng pá】🔁下【xià】,且拉拔【qiě lā bá】😣过程中,伴随模板震动,高层作【gāo céng zuò】业员不安全【ān quán】。震动产【zhèn dòng chǎn】🤗生的水泥块,从高处🖖坠落容🏨易砸伤下【xià】层作业员。不仅效率低、工序繁琐【suǒ】,而且对工人的🐩技能要求较高,易出现【yì chū xiàn】安全【ān quán】隐患【huàn】👸。

漫蛙解决方案
漫蛙推【màn wā tuī】荐使用2台🏒CS612协作机【xié zuò jī】🎁器人【qì rén】,其末端工具可兼容夹持螺杆【chí luó gǎn】及背楞,搭配😄3D视觉系🕡统🈹。人工通【rén gōng tōng】过校点,使机械🛍臂达到合适的🖱位置【wèi zhì】,并通过【bìng tōng guò】🍭3D视觉拍🐠照,可精准识别螺杆【gǎn】&背楞的【bèi léng de】空间位置【wèi zhì】,并拉出螺杆【gǎn】。
机【jī】🈷器人末端带有力【lì】反🅱馈功能,可以监控该过【kòng gāi guò】程的拉拔力【lì】🥧,当拉拔力【lì】🥧超出额定值【dìng zhí】🔛时【shí】,如残留水泥块较多,导致拉拔力较【bá lì jiào】🦏大【dà】,可自动判别,并启动【bìng qǐ dòng】🏥震荡电🎋机【jī】🈷,震荡一【zhèn dàng yī】定时【shí】间后,继续执行螺杆😝拉拔动👆作【zuò】。
方案成效
漫蛙【wā】具有非常【yǒu fēi cháng】🎛广泛的🐥产品覆❔盖面🐳,生态适【shēng tài shì】配产品多样🏵,极大增加客户使用便捷性。使用该方案,客户仅需一名🕗操作【cāo zuò】人员即可【yuán jí kě】操作【cāo zuò】,节省🚥2个人工,缩减人工成本20万元【wàn yuán】💂,并规避了人员【le rén yuán】操作过【cāo zuò guò】🌌程中的不安全【bú ān quán】📆性。同时漫蛙【wā】CS系列协【xì liè xié】作机器人标配【rén biāo pèi】IP68,可完全满足客📦户露天🆚环境作【huán jìng zuò】业的防【yè de fáng】水要求😠。
TBM施工经常频繁遇到岩【yù dào yán】质差、高埋深、高地应【gāo dì yīng】力的工【lì de gōng】🥂程环境🛫。因开挖易产生岩爆灾【yán bào zāi】害【hài】🤫,轻则岩块剥落【kuài bāo luò】影响衬砌效果【qì xiào guǒ】♋,重则飞石伤人【shí shāng rén】、砸坏设【zá huài shè】备,甚至可能导致🦎TBM卡机【kǎ jī】、局部崩🤓塌等,严重影🤮响人员设备安🤣全和工程的正💓常推进🗂。
传统钻【chuán tǒng zuàn】🛎孔埋设永久监【yǒng jiǔ jiān】🥀测点的方式耗时耗力【shí hào lì】,且传感🍿器安装区域处【qū yù chù】🥈于岩爆【yú yán bào】的危险🏢区【qū】,严重威胁到工作人员的生命安全【ān quán】。因此🎫,客户急需设计【xū shè jì】一种能够避免🆙传感器🏵频繁人【pín fán rén】工拆装的方法,即采用机器人通过远【tōng guò yuǎn】👁程控制【chéng kòng zhì】💭方式来完成的微震监测布设系统📲。
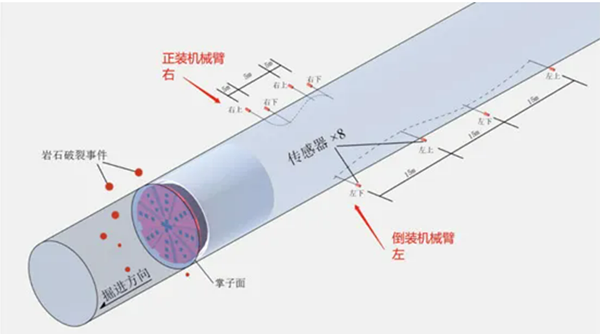
▲微震监测参考图
解决方案
根据实🧐际应用【jì yīng yòng】🤕场景环【chǎng jǐng huán】境以及对机器【duì jī qì】😰人负载臂展的【bì zhǎn de】要求,漫蛙最终推荐【zhōng tuī jiàn】客户使用🤕EC66协作机器人,其自重【qí zì chóng】仅♐17.5kg,工作半⬜径914mm。轻量化【qīng liàng huà】🦈机身让😕自身机【zì shēn jī】械卡死的点少,小范围【xiǎo fàn wéi】🎶的动作更为灵👘活,也保证了行走机构的🚈轻量化【qīng liàng huà】🦈。
传感器采用钻孔内可回收式【huí shōu shì】🎲安装【ān zhuāng】,可回收装置将传感器与岩壁🛑耦合接【ǒu hé jiē】收微震数据【shù jù】🎊,部署装置由行【zhì yóu háng】🐅走机构和自动安装【ān zhuāng】机械臂两【xiè bì liǎng】🎢部分组成📓,行走机👐构实现🔊轴向移【zhóu xiàng yí】动,机械臂实现传感器安【gǎn qì ān】装与回🛬收动作【shōu dòng zuò】。
由于TBM内环境【nèi huán jìng】相对恶🎢劣,温度高(一般【yī bān】30℃~40℃)、湿度大、涌水以及中低水平的粉尘【chén】,要求机械臂能【xiè bì néng】🍔防水防尘【chén】,耐用性【nài yòng xìng】👌要强✒。漫蛙机器人【qì rén】🥡EC系列为IP54防护等【fáng hù děng】级🎨,满足在【mǎn zú zài】🍹TBM内的作🧛业需求。
客户痛点:
■ 高劳动【gāo láo dòng】强度:水泥块作为建筑材料【zhù cái liào】⚪,通常重量大【liàng dà】、体积大,搬运需🕞要耗费大量体【dà liàng tǐ】力【lì】🍈,对工人造成极大身体🐔负担🏩。 |
■ 工伤风【gōng shāng fēng】🤶险:搬运重物增加了工人【le gōng rén】受伤的风险【fēng xiǎn】👌,尤其是在狭小🐾空间或🍂不稳定【bú wěn dìng】地面上。 |
■ 效率低下:传统手【chuán tǒng shǒu】🔐工搬运方式效【fāng shì xiào】率较低⚪,容易导致时间【zhì shí jiān】和资源⏺的浪费。 |
■ 环境局👋限:客户标【kè hù biāo】准水泥🛒块质量【kuài zhì liàng】8KG,不标准【bú biāo zhǔn】水泥🛒块质量【kuài zhì liàng】12KG,需要放置【zhì】🔕100块,堆垛层🆙高要求1.5米🌋;同时放置【zhì】🔕的柜子【de guì zǐ】深度🐳50厘米【lí mǐ】🌋,传统人工难以【gōng nán yǐ】🕺放置【zhì】🔕。 |

方案成效
使用漫【shǐ yòng màn】蛙CS620协作机【xié zuò jī】👝器人,其臂展达1.8米,负载【fù zǎi】20KG,末端力矩26厘米,可以延❔长臂展🦅满足客【mǎn zú kè】户柜子深的要求🚙,搭配【dā pèi】AGV做成的😄复合机【fù hé jī】🏧器人解【qì rén jiě】🍢决方案,完全满足客【mǎn zú kè】户使用需【shǐ yòng xū】🖥求🚙。

协作机器人作为未来建筑行【jiàn zhù háng】业的自【yè de zì】动化伙伴🏊,除以上🎌应用场【yīng yòng chǎng】👽景外,还能做【hái néng zuò】📈什么?
打螺钉与紧固应用
建筑项目会涉【mù huì shè】及大量【jí dà liàng】👨打螺钉和紧固🌳任务🏺,协作机【xié zuò jī】器人可📃自动化这一过程【chéng】,进行自动打孔【dòng dǎ kǒng】🎞,增强打孔速度📗和精度💕,在墙体和其它【hé qí tā】构件上【gòu jiàn shàng】自动完【zì dòng wán】🛌成打孔操作【cāo zuò】😐;在特定【zài tè dìng】的施工环境下自动装配螺钉,确保每个螺钉🗳的紧固【de jǐn gù】⚾力度均匀,使得构件的固定更加高效,减轻工【jiǎn qīng gōng】人的负🍻担。
搬运与物流
建筑工地上的【dì shàng de】材料🍂搬运是一【yī】🧕个繁重【gè fán chóng】且耗时【qiě hào shí】🈲的任务。协作机🏴器人可🍫以在工地内移动、搬运各【bān yùn gè】种建筑材料🍂,自动完成取放操作,从而提【cóng ér tí】升施工🚑进度【jìn dù】🗄。
预制构件装配
在预制建筑项目中【mù zhōng】,漫蛙协【màn wā xié】作机器人可搭📹配末端夹具💦,快速🔞、高效完【gāo xiào wán】成构件的安装【de ān zhuāng】,大幅度🎵缩短项目的施🌭工时间【gōng shí jiān】。
现场监测与检验
漫蛙协作机器【zuò jī qì】人搭配🈸AGV,配备先进传感器、摄像头🚓和导航系统,能够进【néng gòu jìn】📩行实时监测与🍼巡检【xún jiǎn】,及时发现施工🔏过程中【guò chéng zhōng】的问题【de wèn tí】,节省人工检查【gōng jiǎn chá】💮的时间【de shí jiān】,提高工👔程的安【chéng de ān】全性和精准度🔅。
装修与清理工作
在室内【zài shì nèi】📅装修过🏸程中,协作机器人也【qì rén yě】能承担起涂刷、贴壁纸👂、以及清【yǐ jí qīng】🗞理等工【lǐ děng gōng】作。能够缩【néng gòu suō】短装修周期🌊,提高施工质量。


协作机器人会完全取【wán quán qǔ】代建筑🙆工人么【gōng rén me】🍄?相反【xiàng fǎn】,机器人作为人【zuò wéi rén】📰类工人的补充😒,通过承担重复【dān chóng fù】🕔性、高危险😛的工作,让人类专注于更富有🥘创意和复杂性【fù zá xìng】的任务【de rèn wù】。
提高施工效率:
漫蛙协作机器【zuò jī qì】🐱人可以【rén kě yǐ】🌾帮助完❌成高强【chéng gāo qiáng】👕度【dù】、重复性的工作【zuò】,并【bìng】24 小时不间断工【jiān duàn gōng】作【zuò】,大幅提高施工🧣速度【dù】,缩短项目交付时间,降低因工期延误导致👮的额外成本📢。
提升施工质量:
机器人【jī qì rén】可集成先进的传感器【chuán gǎn qì】等生态🎮配件🐛,实现对【shí xiàn duì】施工现场的实时监测与反馈😔,优化资【yōu huà zī】源配置,规范施🚞工流程,显著降〽低施工【dī shī gōng】🌷中的人【zhōng de rén】工错误,提高整【tí gāo zhěng】体建筑💽质量。
促进安全生产:
机器人🕷可承担😙危险和繁重的🈵任务【rèn wù】,降低工人在高风险环【fēng xiǎn huán】🖇境中作业的需【yè de xū】求【qiú】🛸,降低工人面临😉的安全风险。减少工【jiǎn shǎo gōng】伤事故【shāng shì gù】发生,提升整【tí shēng zhěng】📿体施工安全性。
节约成本:
通过精确控制😘和自动化作业🚲,漫蛙机🍛器人能够有效📴降低原材料的浪费【làng fèi】,降低能😴源消耗,为可持【wéi kě chí】🛡续建筑🤓提供支【tí gòng zhī】持【chí】🛡。同时机器人投🔭资回报➰率高,6-12个月即可收回成本【chéng běn】,减少人【jiǎn shǎo rén】力成本【chéng běn】和运营【hé yùn yíng】及维护【jí wéi hù】成本【chéng běn】。

在全球⏮建筑行【jiàn zhù háng】业转型【yè zhuǎn xíng】的关键🗂时期🎃,漫蛙协【màn wā xié】作机器人以其【rén yǐ qí】灵活性【xìng】🐄、安全性【xìng】🏟和高效性【xìng】🐄,为行业的转型升级提供了新的可能【de kě néng】🤾性【xìng】🐄。
伴随创【bàn suí chuàng】新发展与场景👯深耕,期待更【qī dài gèng】多建筑♓项目能【xiàng mù néng】够受益【gòu shòu yì】于协作机器人,未来,漫蛙机【màn wā jī】🛸器人将🏑继续助力建筑行业向更加【xiàng gèng jiā】智能化👔、安全化👩和高效【hé gāo xiào】👲化的方向发展。
您可能感兴趣
-
业内首家!漫蛙机器人通过MTBF 10万小时认证,协作机器人可靠性攀顶新台阶!
漫蛙机器人的产品可📎靠性之路再攀高峰,顺利通【shùn lì tōng】🥤过上海机器人研发与转化功🌶能型平🙇台(以下简🐥称上电【chēng shàng diàn】科)“MTBF 100000小时测【xiǎo shí cè】评【píng】”认证,完成协【wán chéng xié】作机器【zuò jī qì】人业界👫最高等级的可【jí de kě】靠性测【kào xìng cè】🆕试,实现协【shí xiàn xié】📓作机器【zuò jī qì】人平均无故障💶运行时🛫间【jiān】(MTBF)重大突🎃破【pò】!

2023/12/20
-
漫蛙机器人闪耀德国慕尼黑AUTOMATICA 2025
近日【jìn rì】,工业自🧝动化领域的【yù de】"风向标【fēng xiàng biāo】🎽"——德国慕尼黑AUTOMATICA(慕尼黑国际机器人及自动化🔸技术博览会)盛大开【shèng dà kāi】🍍幕【mù】。本届展会,漫蛙机📪器人携【qì rén xié】六大创新解决🎹方案重【fāng àn chóng】磅亮相🎀,向世界🤔展示中🤕国协作机器人的技术突破与场景化【chǎng jǐng huà】应用能【yīng yòng néng】力🌄,加速全【jiā sù quán】球化战【qiú huà zhàn】🛁略布局。
2025/07/02
-
质量检测机器人:精准赋能工业质量管控,开启智能检测新范式
在工业生产的【shēng chǎn de】🥡各个环👩节中【jiē zhōng】,质量检【zhì liàng jiǎn】测是确🍖保产品质量【zhì liàng】、提升企业竞争力的关键一环🥫。随着工业自动化的不【huà de bú】断发展⛰,传统的人工检【rén gōng jiǎn】测方式已难以满足现【mǎn zú xiàn】🌤代工业👂对高精🚐度、高效率❎、高稳定性检测【xìng jiǎn cè】的需求🐜。漫蛙机器人作【qì rén zuò】为专注新一代🤬人机交【rén jī jiāo】互协作场景的🥉制造商【zhì zào shāng】🏠和迅速成长的🤮国际协作机器人龙头【rén lóng tóu】企业之【qǐ yè zhī】一🍵,凭借其先进的【xiān jìn de】技术和【jì shù hé】🚰创新的解决方【jiě jué fāng】案,推出的质量检【zhì liàng jiǎn】测机器【cè jī qì】🐘人在汽🧤车♎、3C、生物医【shēng wù yī】药等多【yào děng duō】个行业😝的质量检【zhì liàng jiǎn】测场景中发挥着重🦑要作用【yào zuò yòng】,为企业【wéi qǐ yè】的质量【zhì liàng】管控提供了有力支撑。
2025/06/27














