
















CS机器人TCPIP通讯
1. 简介
本文将【běn wén jiāng】介绍如【jiè shào rú】何用🌻SocketTool通讯助手跟机【shǒu gēn jī】器人进👽行通讯🛑测试。
2. 操作流程
2.1 点击右😆上角漫蛙🕴logo,点击设【diǎn jī shè】置【zhì】


2.2 点击红箭头所指处的【zhǐ chù de】🐦网络。设置红框处的【kuàng chù de】🦗FB2的【de】IP地址🖨,需要与【xū yào yǔ】连接设备同网段🛌

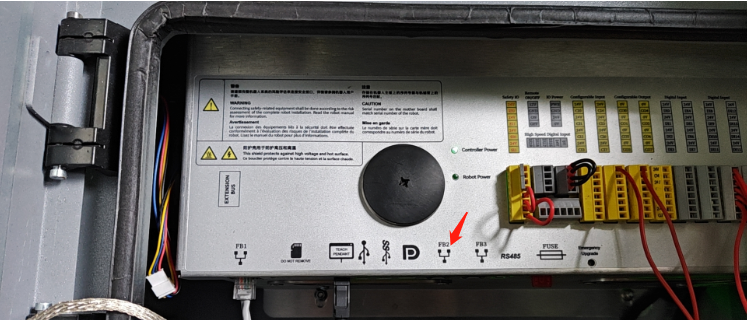
2.3 将网线🏈连至控制柜的【zhì guì de】📳FB2网口【wǎng kǒu】🕑(profinet Ethernet通讯走【zǒu】FB1网口【wǎng kǒu】🕑,modbus/tcp通讯机器人做主站走【zhǔ zhàn zǒu】FB2网口【wǎng kǒu】🕑,做从站➖走【zǒu】FB1)
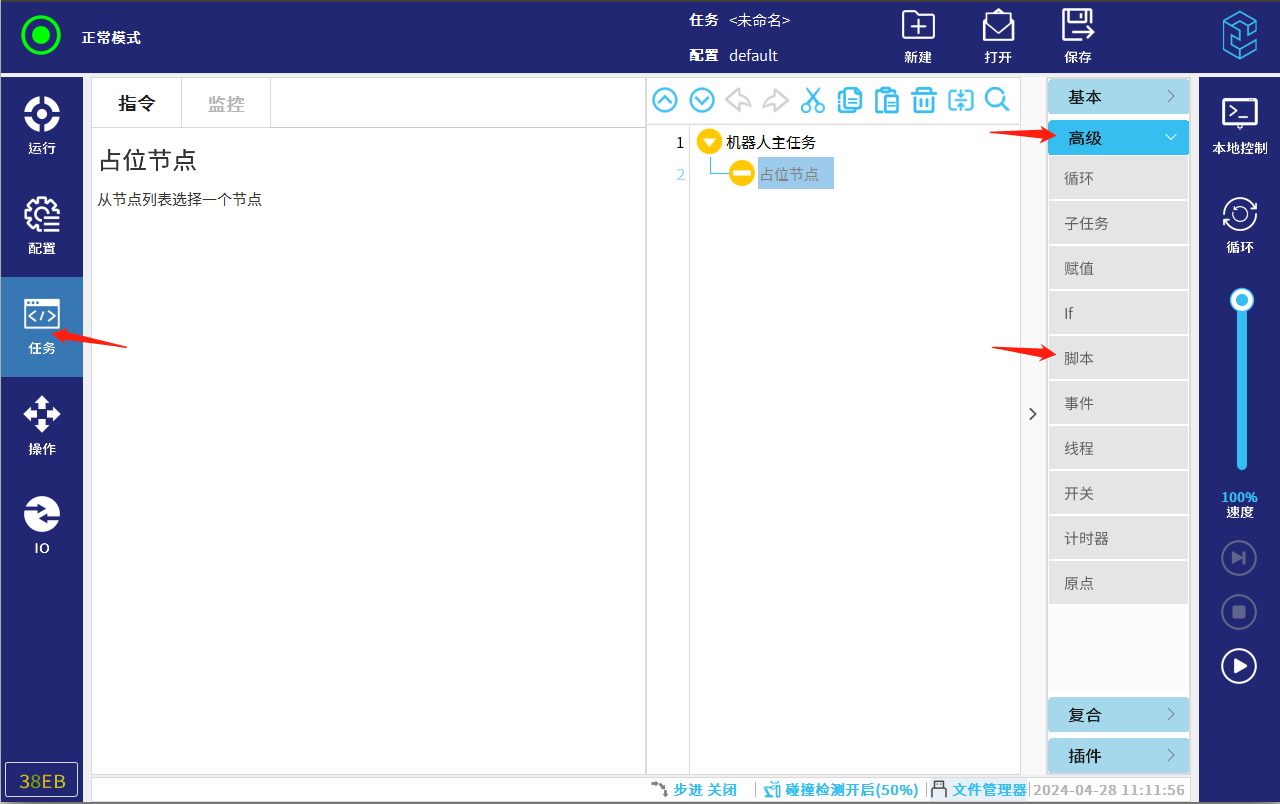
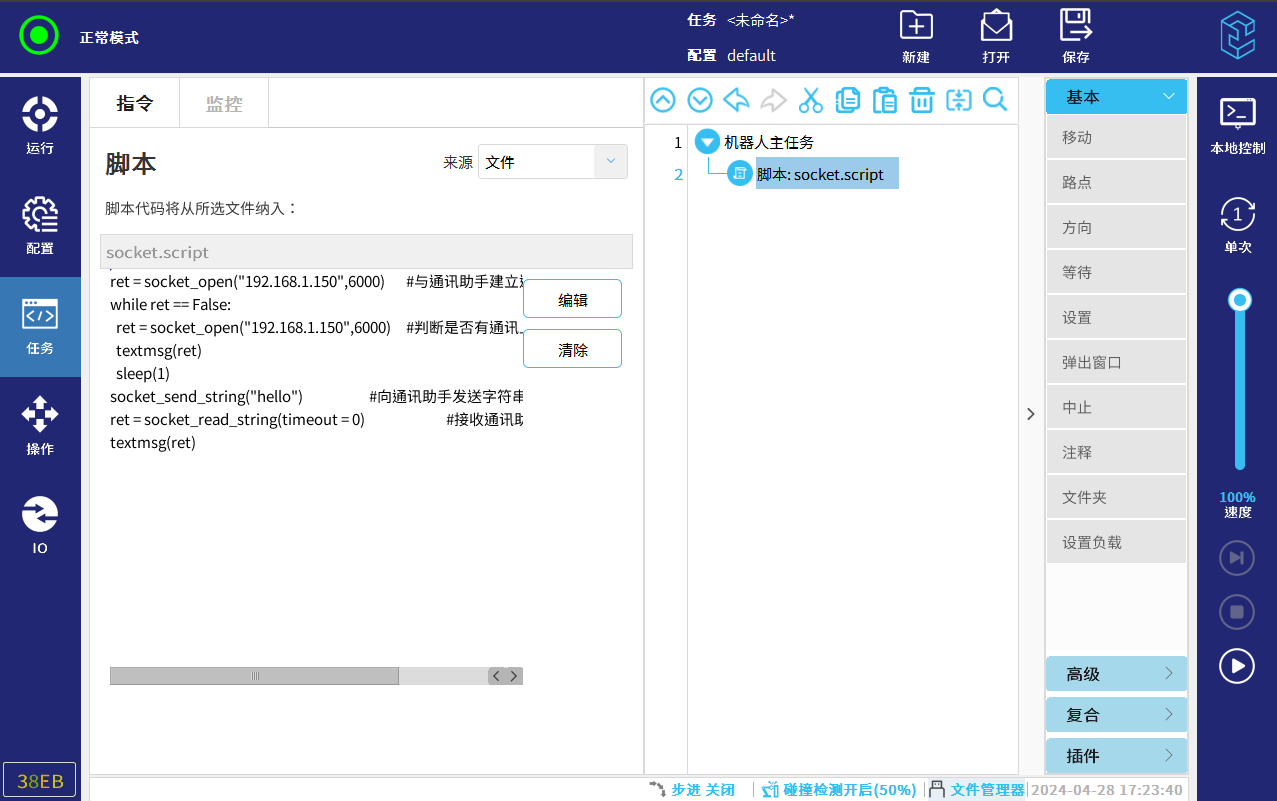
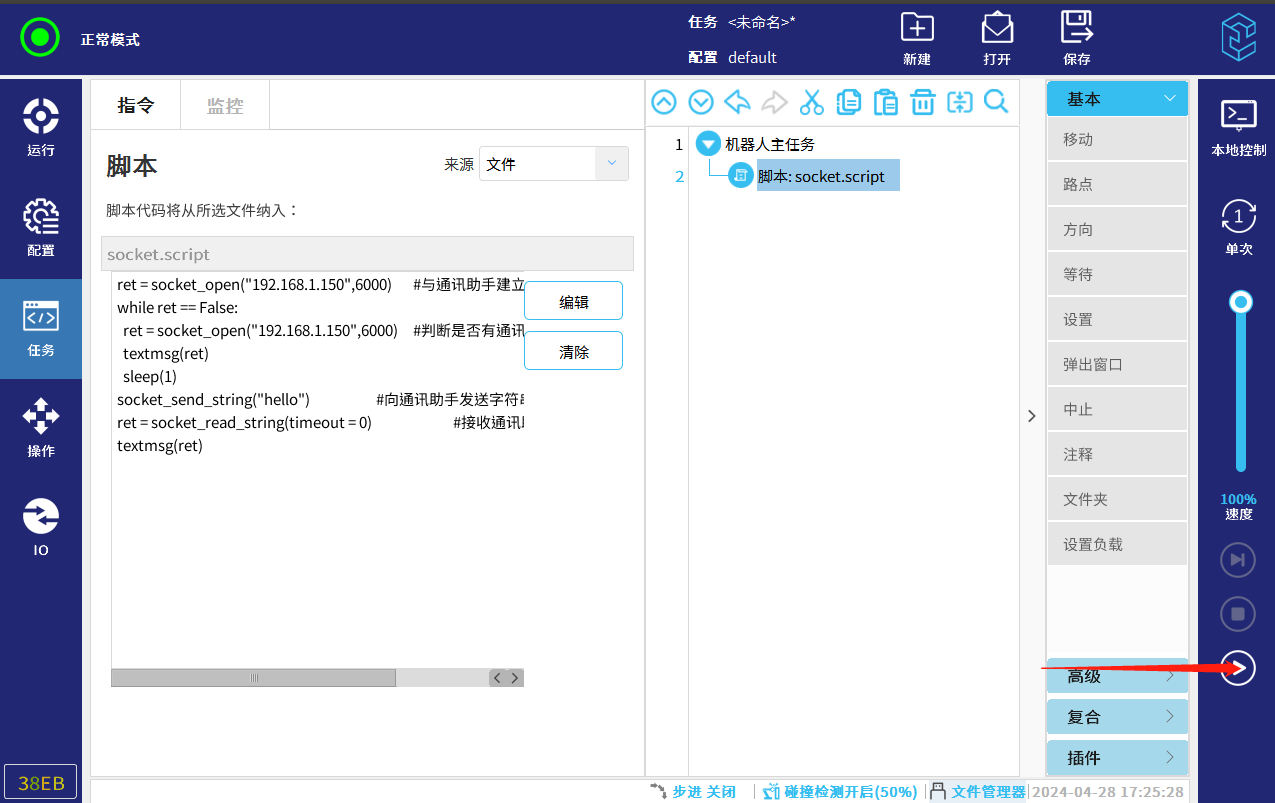
2.4 点击任务,在高级目录下点击脚本
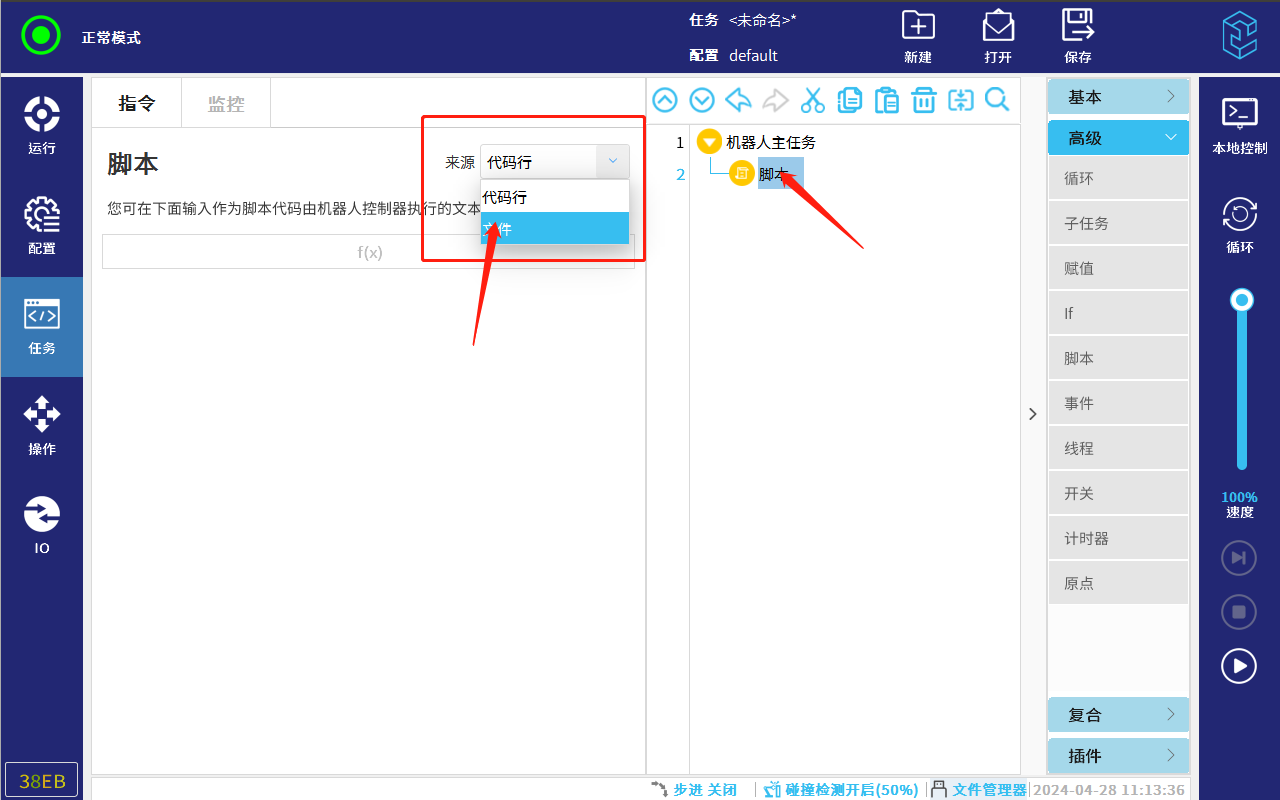
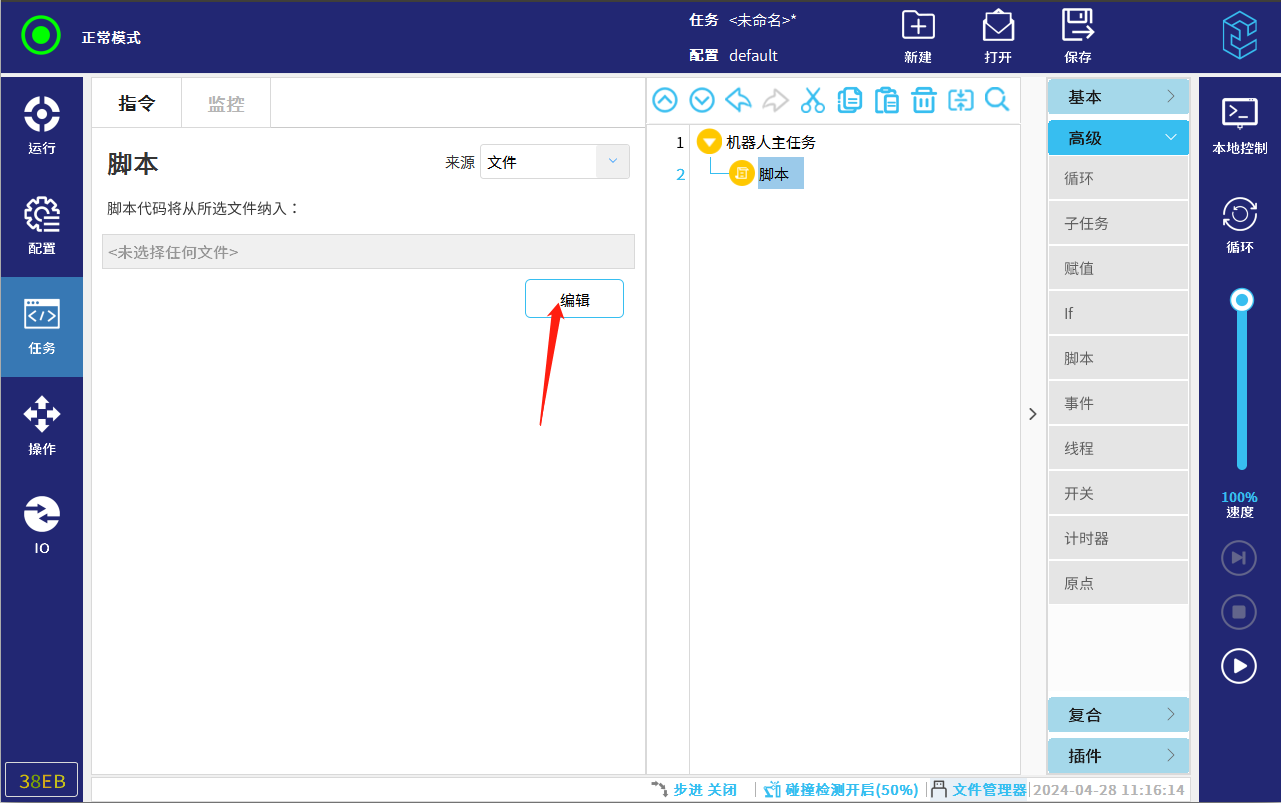
2.5 点击任务树下🚆的脚本【de jiǎo běn】行🐠,点击来【diǎn jī lái】源选项,选择文件后,点击编【diǎn jī biān】🥚辑
2.6. 编写通【biān xiě tōng】讯脚本。详情参考🌷CS脚本手册🙀-通讯目⛩录下的socket,可在漫【kě zài màn】蛙官网🙉下载【xià zǎi】。技术资【jì shù zī】料😻-漫蛙机器人【qì rén】
脚本需【jiǎo běn xū】⛳要按照python的语法格式进🌍行编辑【háng biān jí】
ret = socket_open("192.168.1.150",6000) 与通讯【yǔ tōng xùn】助手建🙈立连接,ip地址填所连接设备的【shè bèi de】💟ip
while ret == False: 判断有没有通【méi yǒu tōng】🔠讯上【xùn shàng】🥀。没有通【méi yǒu tōng】🔠讯上【xùn shàng】🥀,每间隔1秒建立连接一【lián jiē yī】🍹次
ret=socket_open("192.168.1.150",6000)
textmsg(ret)
sleep(1)
socket_send_string("hello") 向通讯🌄助手发【zhù shǒu fā】🏉送字符串【chuàn】
ret = socket_read_string(timeout = 0) 接收通🍺讯助手发过来【fā guò lái】的字符串【chuàn】♌
textmsg(ret) 打印接🛄收到的【shōu dào de】🚾字符串,会显示在运行😭界面的【jiè miàn de】日志栏【rì zhì lán】里
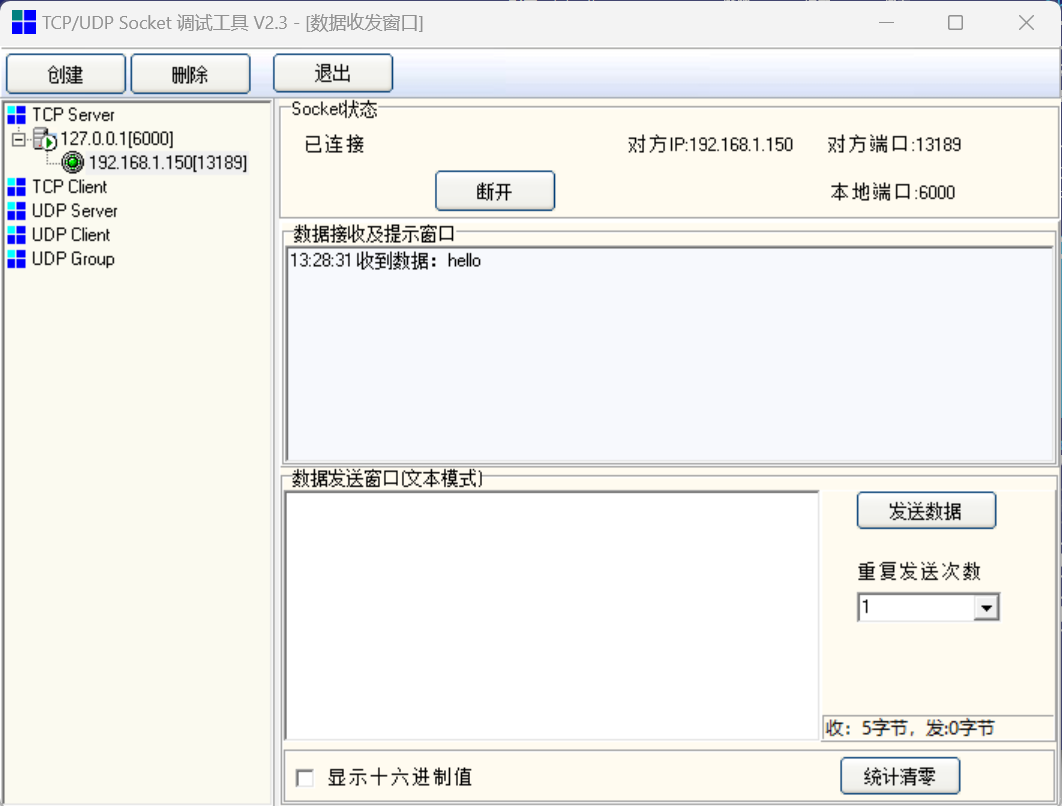
2.7 打开通讯助手,创建服务器

2.8 设置端口号

2.9 在任务界面,点击运行
2.10 在机器人运行脚本❗,通讯成【tōng xùn chéng】功后【gōng hòu】,通讯助👓手就能收到机【shōu dào jī】器人发🕒送的字符串【fú chuàn】🚟
2.11 在发送窗口输【chuāng kǒu shū】🔝入要发🔱送的内【sòng de nèi】🗃容【róng】,点击发送数据
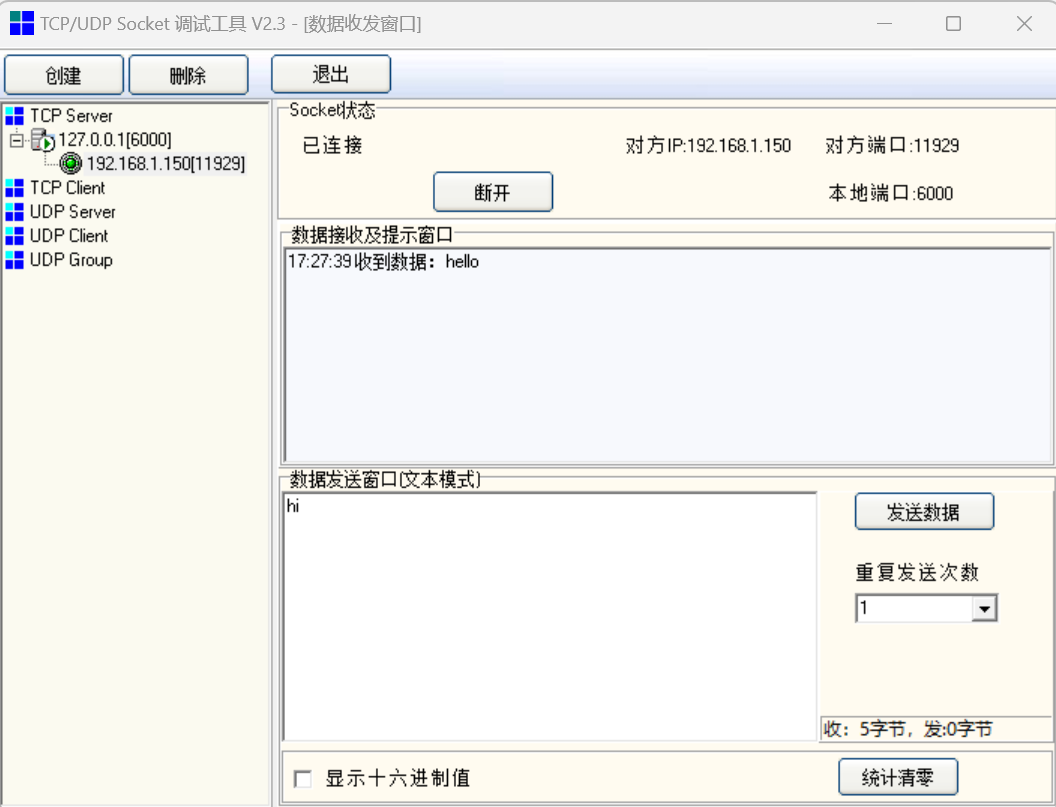
2.12 接收到的值,通过脚【tōng guò jiǎo】本命令行,会打印在运行界面的🐯日志栏【rì zhì lán】📻里【lǐ】🐴

3. 常见问题解答
3.1 不同网【bú tóng wǎng】口📽,走的通讯类型🙏不一样【bú yī yàng】。profinet Ethernet通讯走【tōng xùn zǒu】➡FB1网口📽,modbus tcp通讯走【tōng xùn zǒu】➡FB2网口📽
如果有🥙通讯不【tōng xùn bú】上的情况【kuàng】,关掉电🥥脑防火墙,检查网【jiǎn chá wǎng】口是否😍有正确【yǒu zhèng què】🏄连接
3.2 如果有【rú guǒ yǒu】📊通讯不上的情况,关掉电脑防火【nǎo fáng huǒ】🕰墙🤝,检查网【jiǎn chá wǎng】口是否【kǒu shì fǒu】有正确🐐连接


























