
















CS机器人socket通讯程序中以树状图形式编写
1. 简介
socket通信协【tōng xìn xié】议🤘,一种标准的通信协【tōng xìn xié】议🤘,同时是【tóng shí shì】目前工业电子设备之【shè bèi zhī】间常用🚲的通讯【de tōng xùn】🗨协议🥀,市面上【shì miàn shàng】🔏机器人与夹持器,视觉【shì jiào】,上位机🎦等通讯大多采用这种【yòng zhè zhǒng】通讯方【tōng xùn fāng】式。以下介绍机器🥄人socket通讯基🥄本的几🕶个指令脚本😸,传输字【chuán shū zì】符串数据【chuàn shù jù】和解析字符串数据【chuàn shù jù】。
机器人【jī qì rén】🥈可以作为socket客户端,与外部【yǔ wài bù】设备通🤘讯【xùn】😧,相关指🚾令可以参见CS机器人【jī qì rén】🥈脚本手册。
2. 操作流程
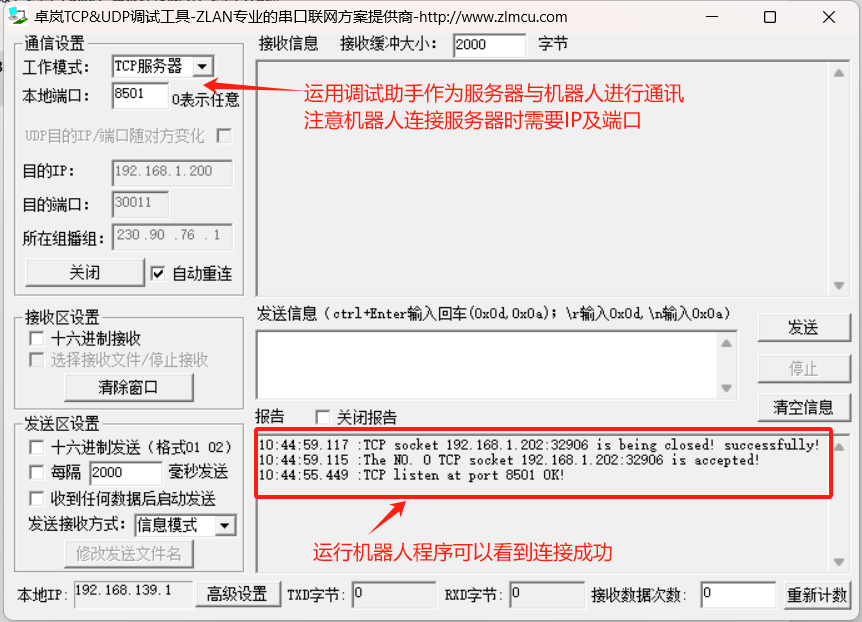
可先建立好通【lì hǎo tōng】💿讯的连【xùn de lián】⛴接,再根据制定好【zhì dìng hǎo】的字符【zì fú】🚻去发送和接收🐯,再处理对应的字符【zì fú】🚻数据转【shù jù zhuǎn】化为可【huà wéi kě】直接使用的数据。
2.0 机器人连接网线
将网线连接至控制柜的FB2网口

设置机器人网口IP
1. 点击右上角漫蛙logo

2. 点击设置

3. 选择静【xuǎn zé jìng】🍈态地址【tài dì zhǐ】,设置🕦FB2网口的IP

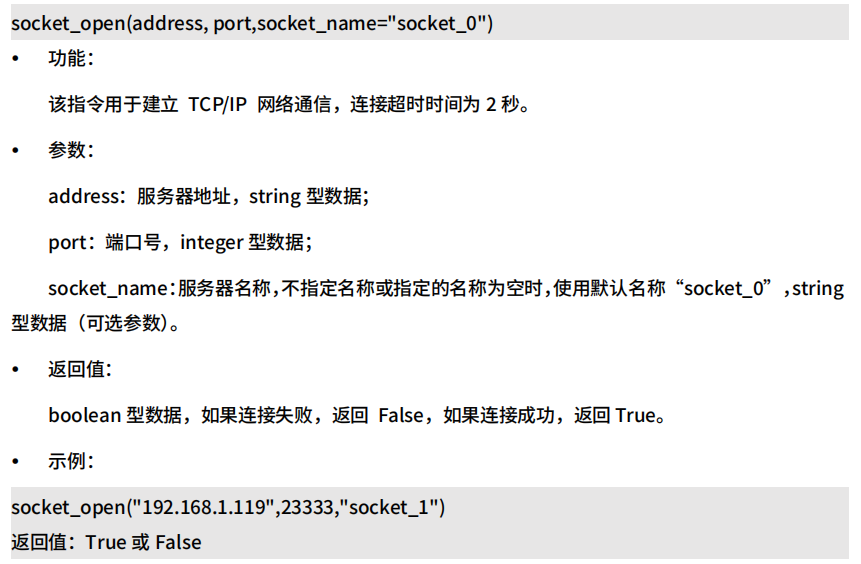
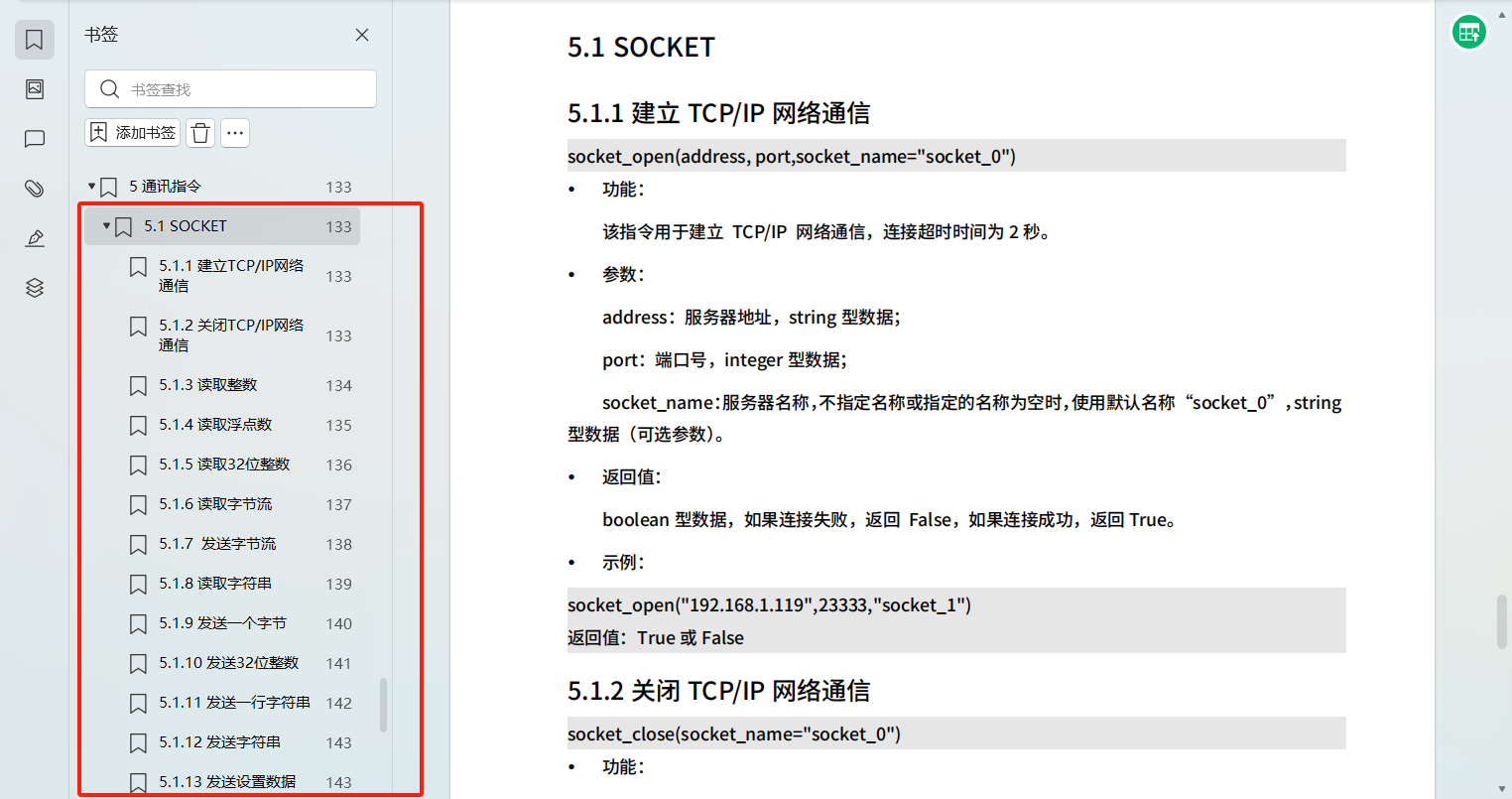
2.1 建立🏸 TCP/IP 网络通【wǎng luò tōng】信指令💧解析【jiě xī】
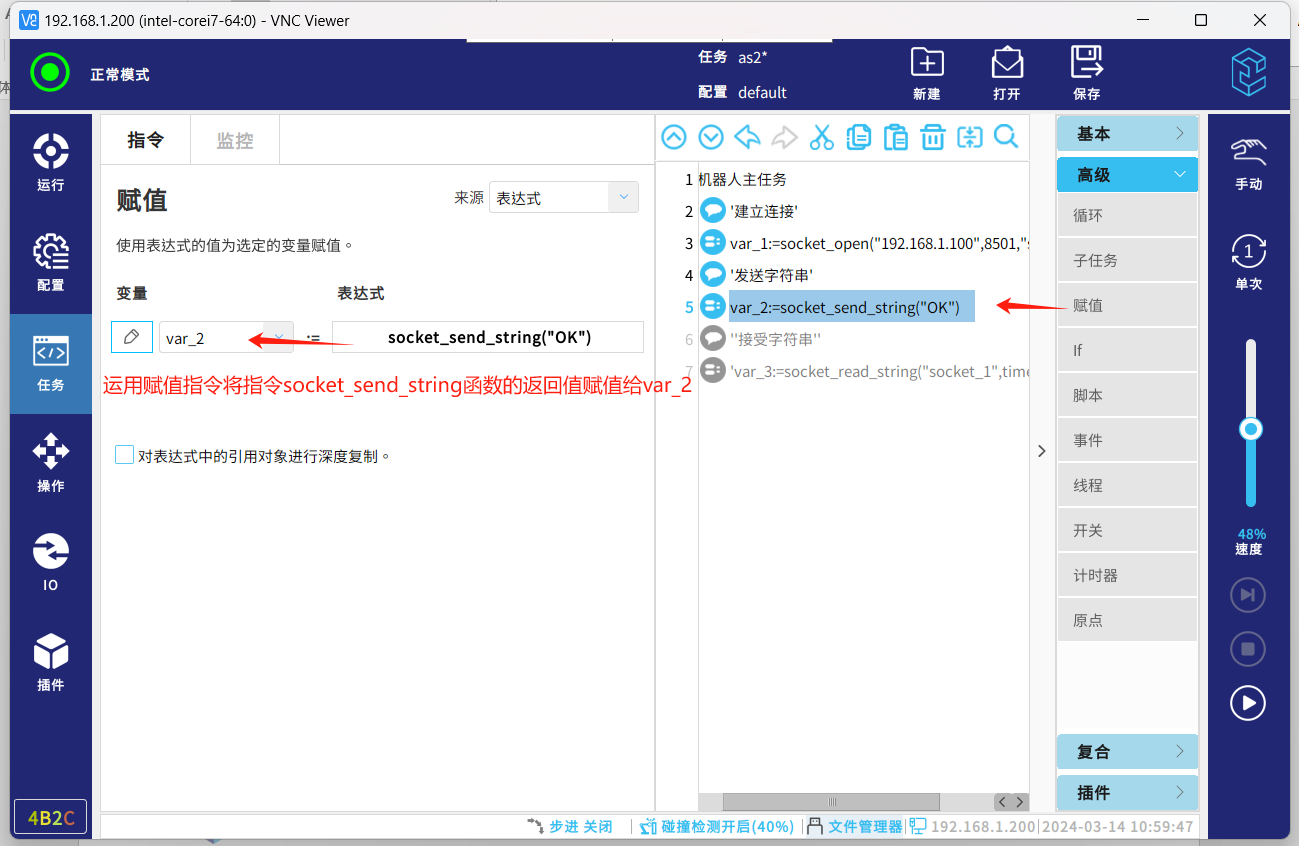
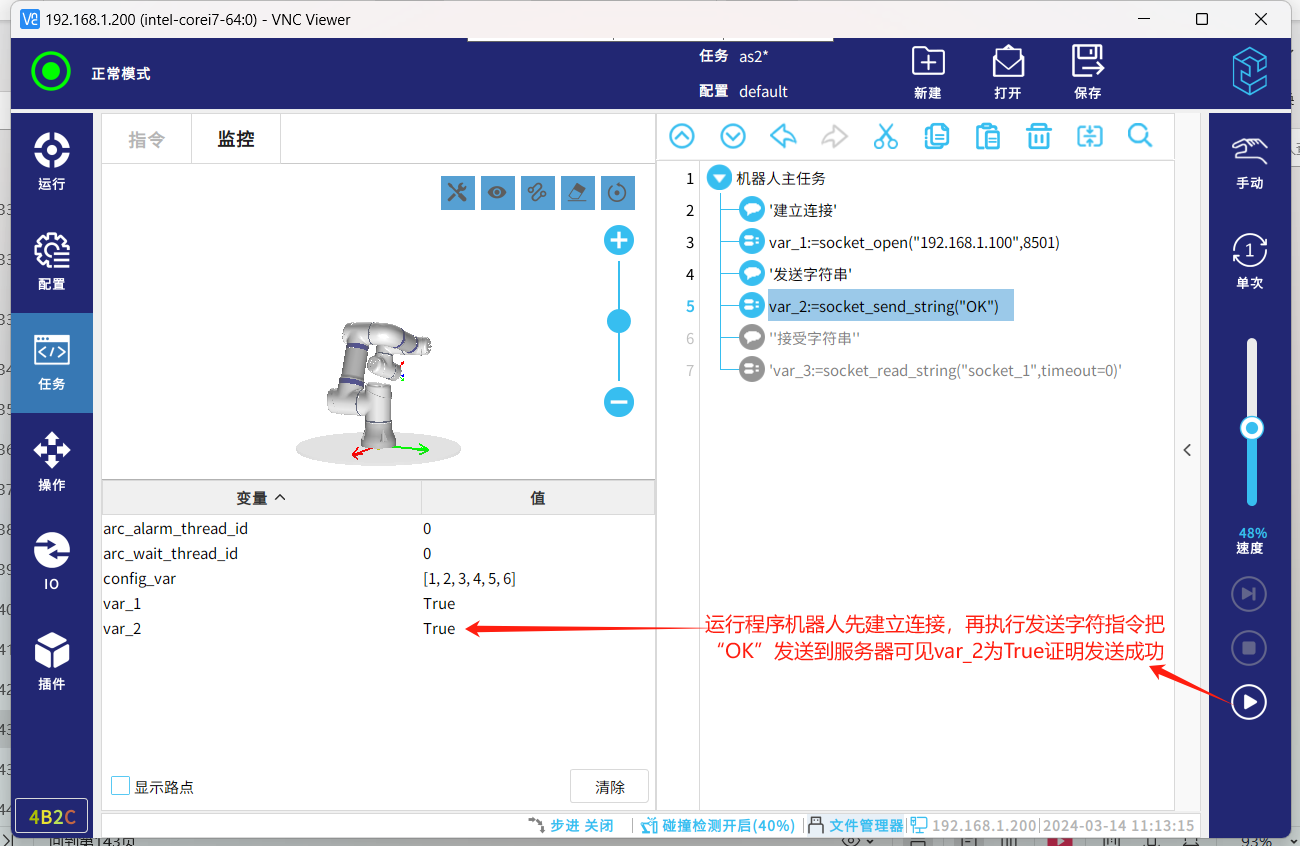
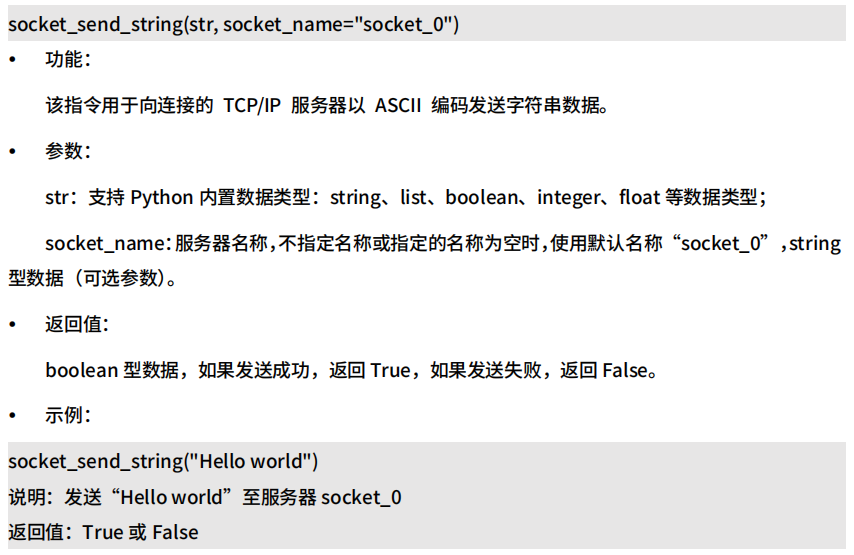
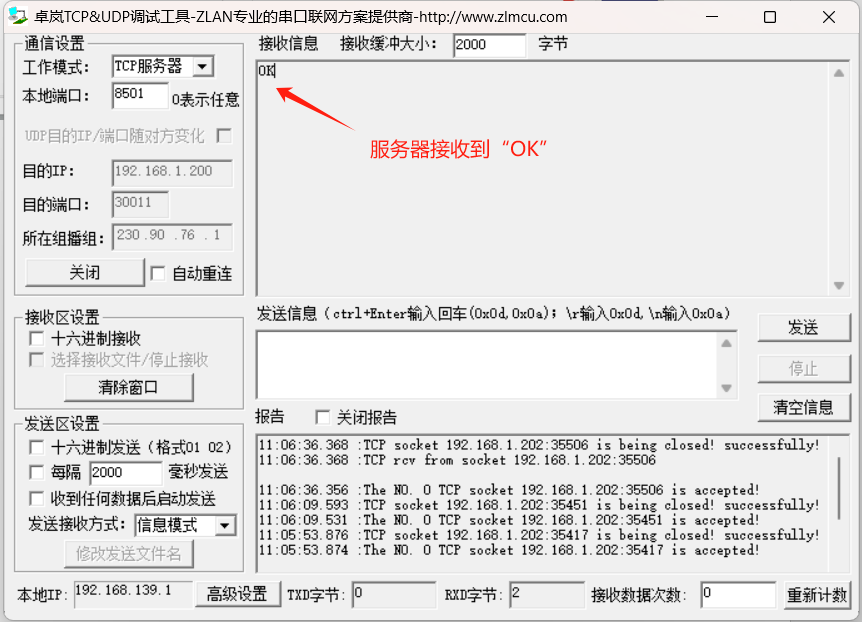
2.2 发送字符串指令
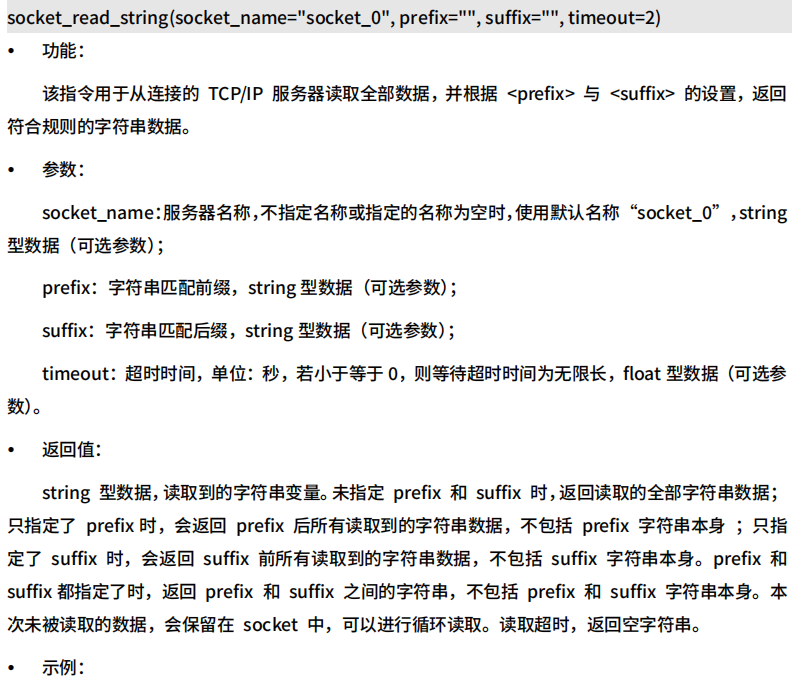
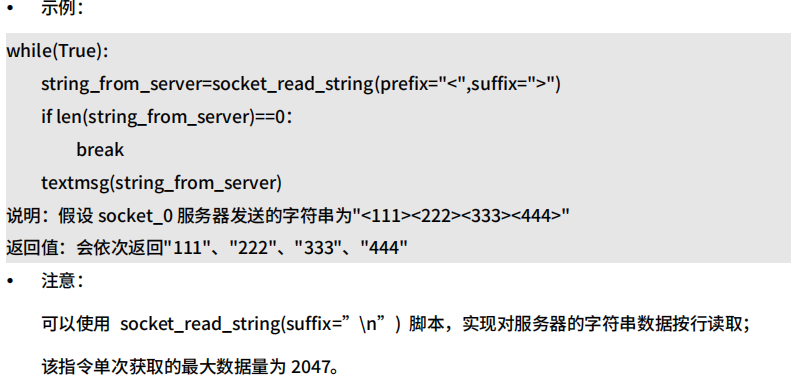
2.3 读取字符串指令解析
2.4 字符处理
3. 常见问题解答
除了示🈵例中字🛫符指令🕧外,脚本手👡册中还其他各【qí tā gè】😺项指令【xiàng zhǐ lìng】可查看脚本手👡册了解【cè le jiě】详细,因为系统脚本是基于python开发,有关于python标准库🎇里面的【lǐ miàn de】处理函【chù lǐ hán】🈲数字符均可使【jun1 kě shǐ】用【yòng】。
4. 示例
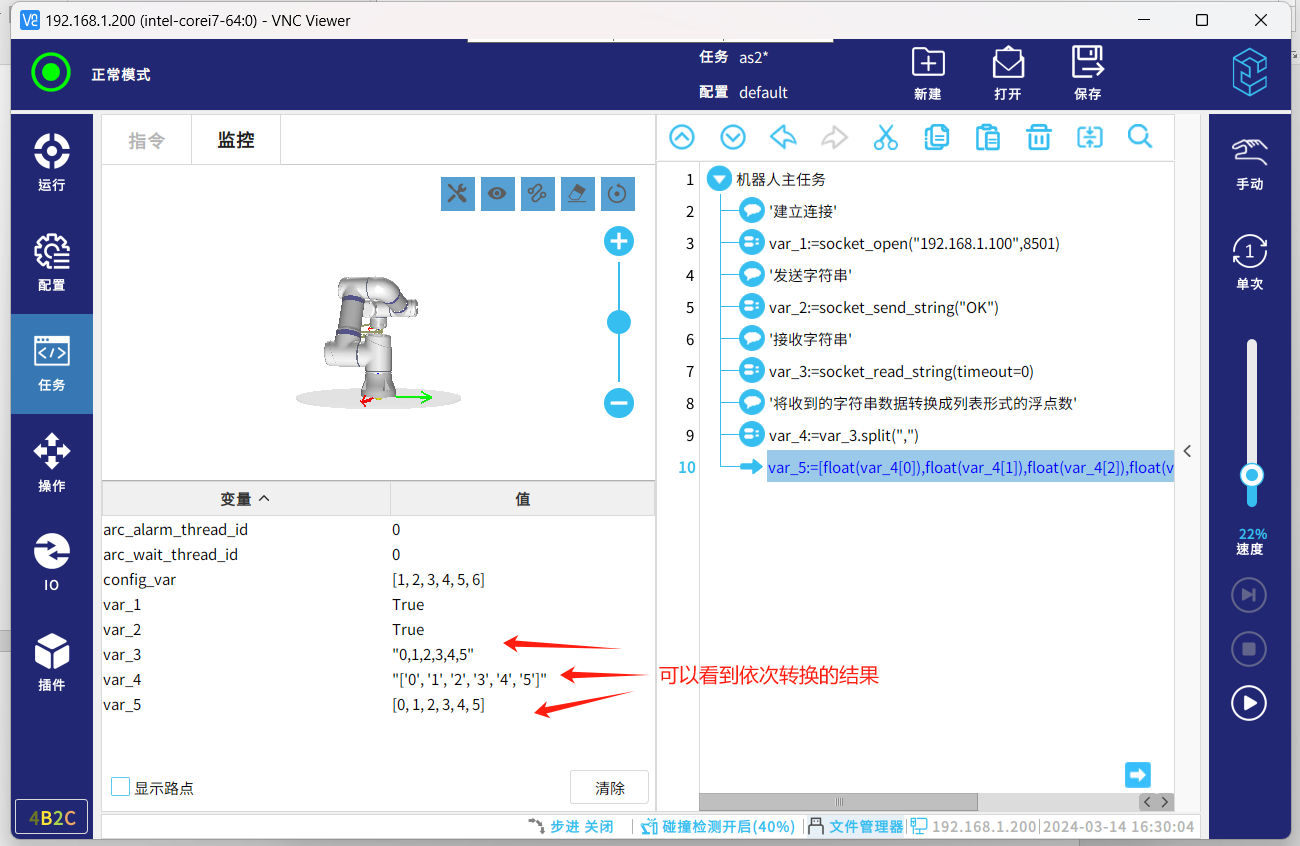
# 建立连接
var_1:=socket_open("192.168.1.100",8501)
# 发送字符串
var_2:=socket_send_string("OK")
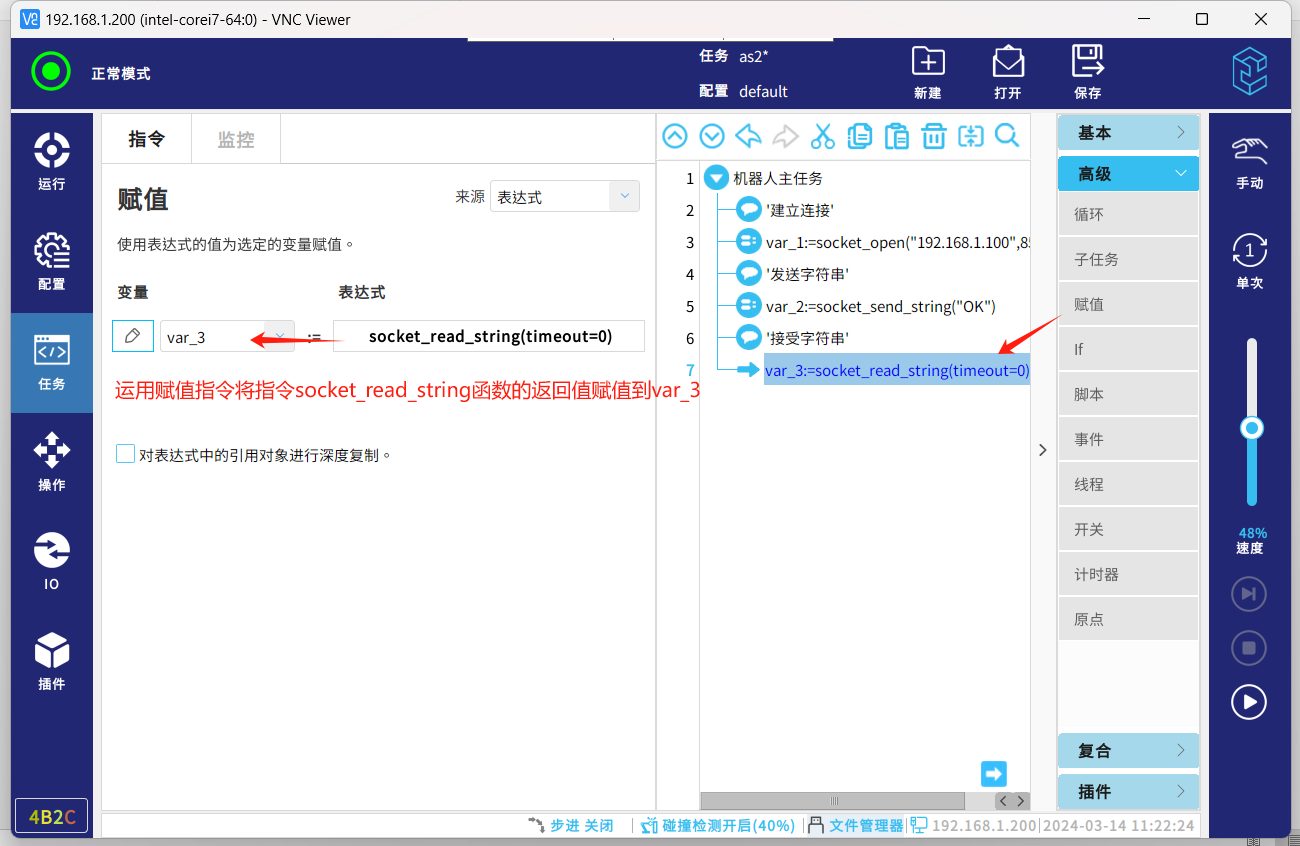
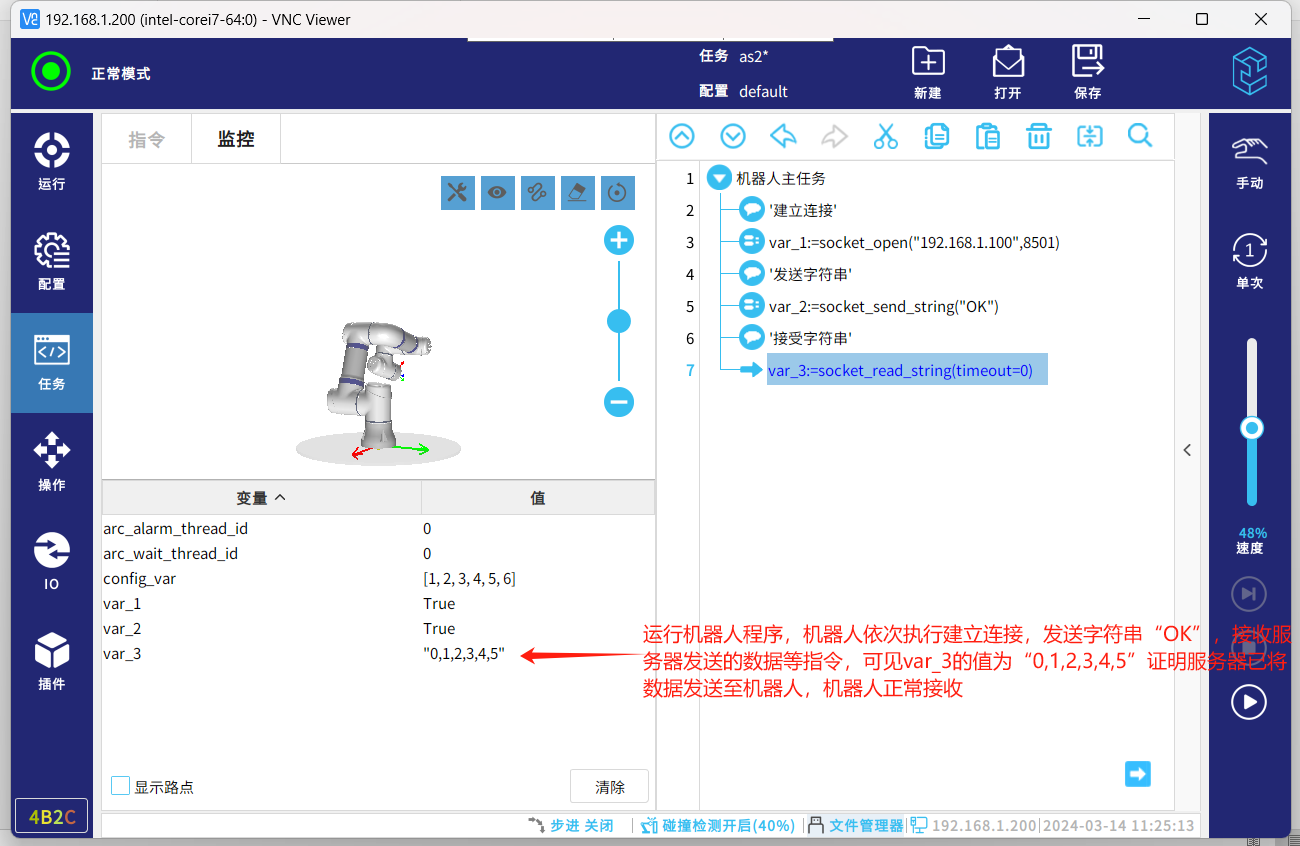
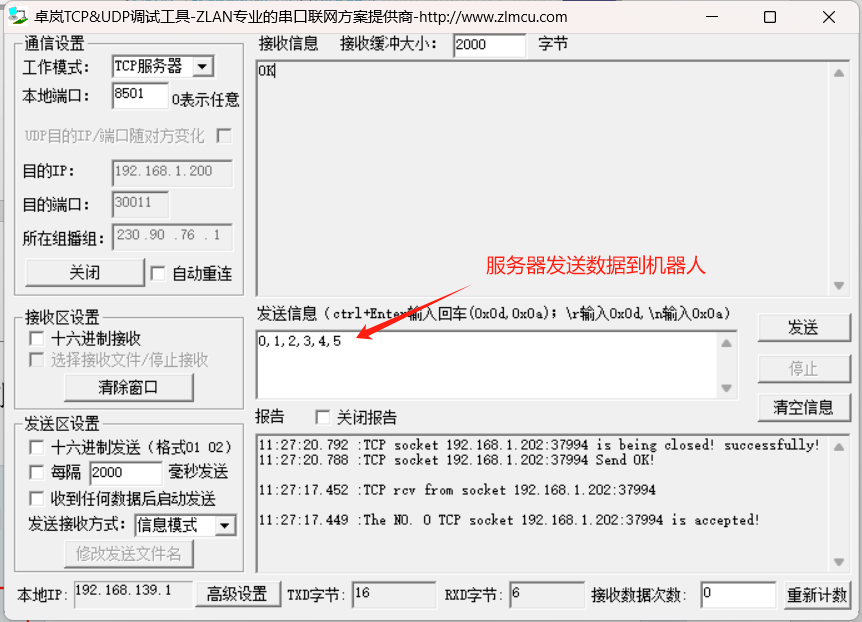
# 接收字符串
var_3:=socket_read_string(timeout=0)
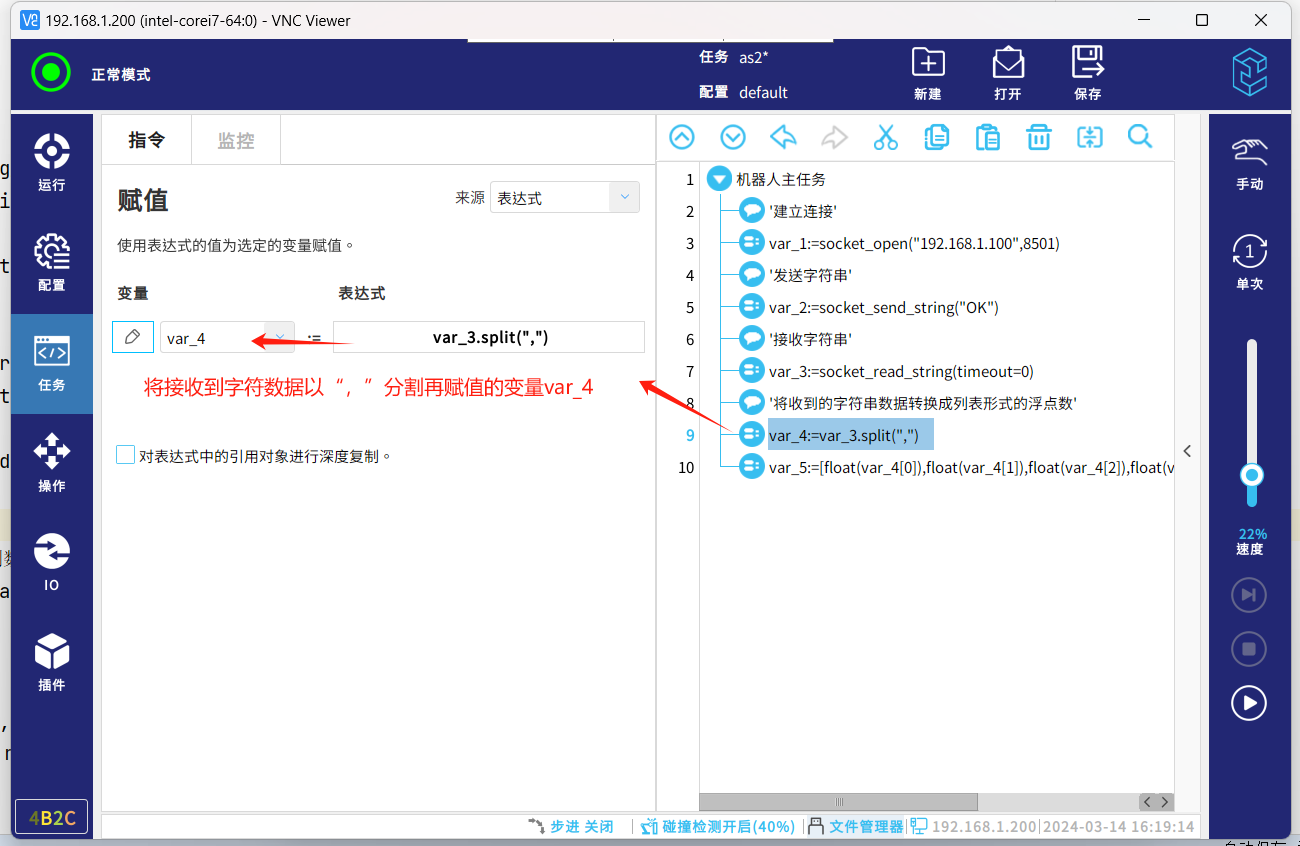
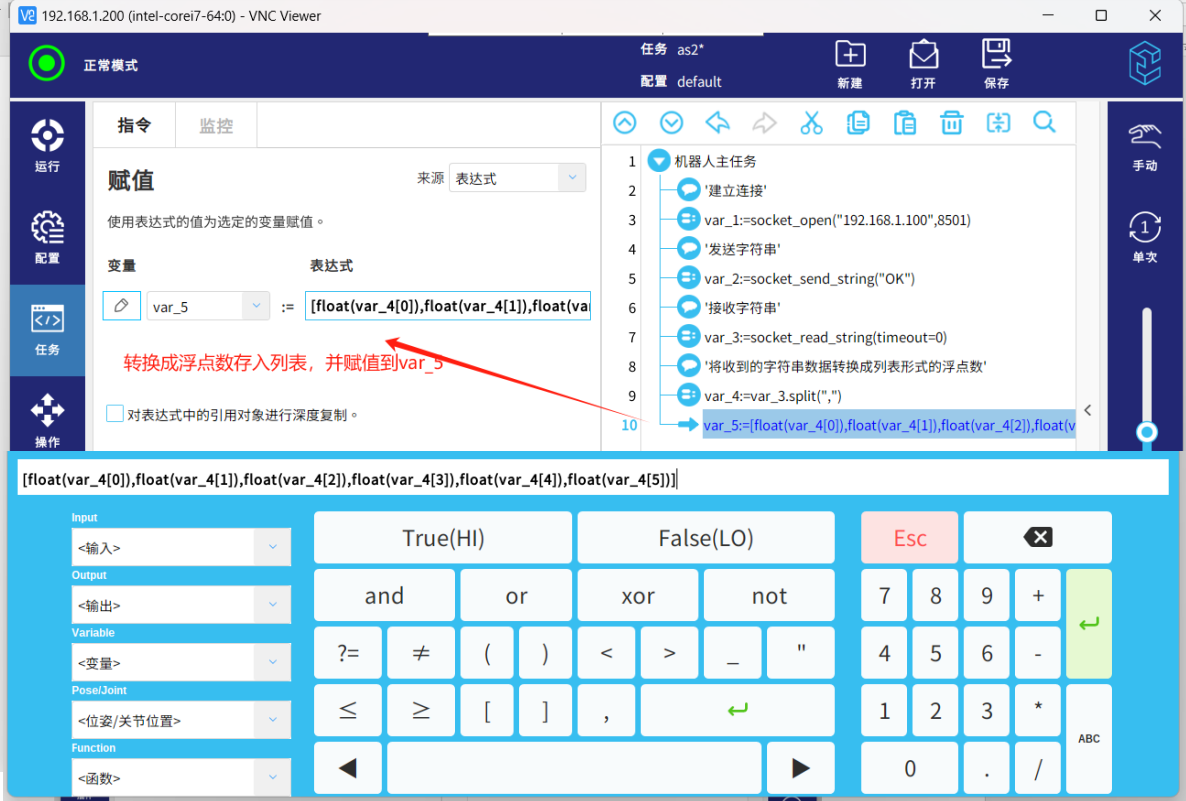
# 将收到【jiāng shōu dào】👴的字符串数据🍳转换成列表形【liè biǎo xíng】🙆式的浮【shì de fú】点数
var_4:=var_3.split(",")
var_5:=[float(var_4[0]),float(var_4[1]),float(var_4[2]),float(var_4[3]),float(var_4[4]),float(var_4[5])]
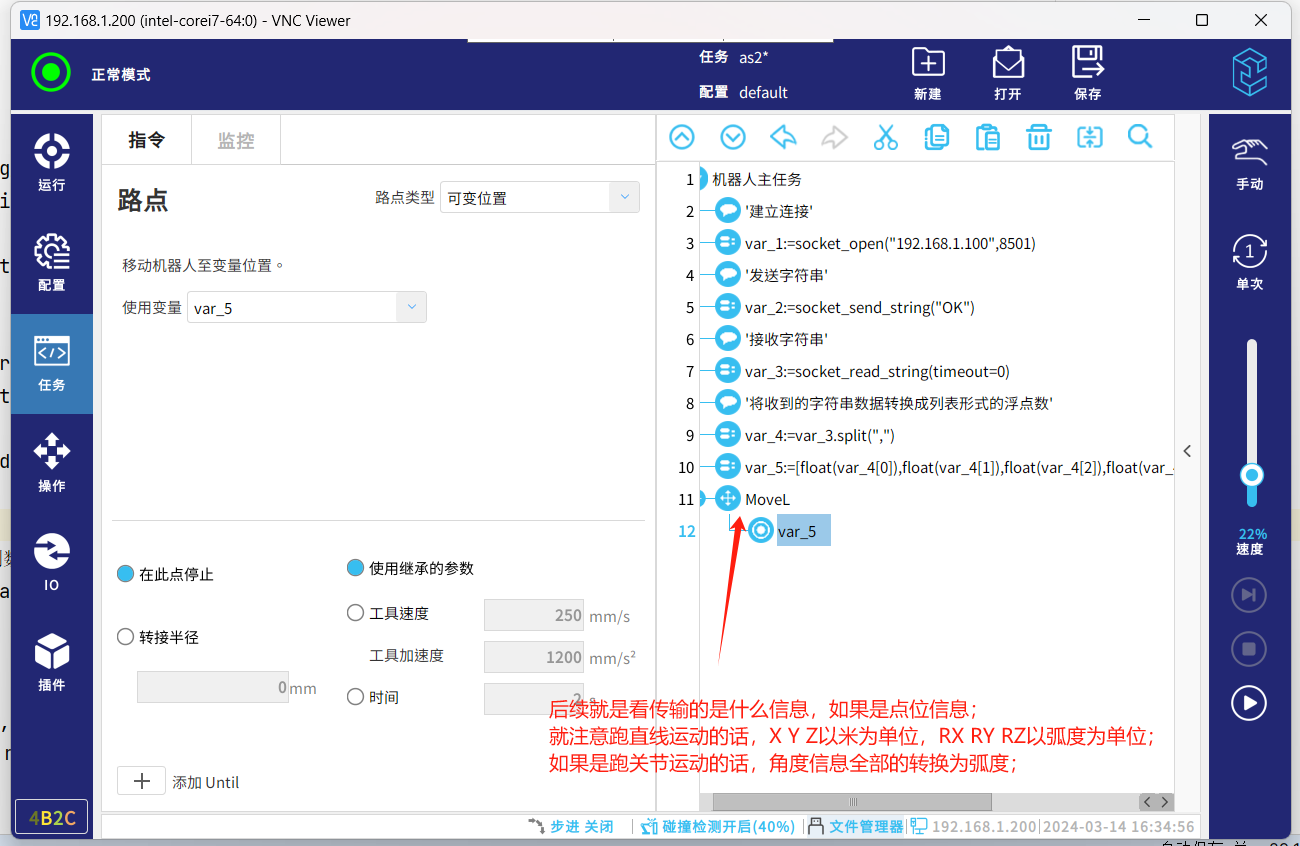
#如果数据是【jù shì】🏟点位【wèi】数据的单位【wèi】🛵是【shì】🏟MM和°可视情况转换🤰为【wéi】m和rad。


























